白鹤滩水电站近坝边坡图像建模及可视化监测可行性研究
2021-07-21李小亮马国辉李俊杰
周 军,李小亮,马国辉,李俊杰
(1.中国长江电力股份有限公司,湖北 宜昌 443000;2.天津杰创天成科技有限公司,天津 301700)
白鹤滩水电站近坝区域两岸含自然边坡和已支护边坡,边坡数量庞大。蓄水发电后的电站运行期,在地震、库区水位波动、地质构造、气候及风化作用等影响下,对边坡进行表面位移监测意义重大,当分析到边坡处于蠕动变形时进行预警,就能够在边坡变形破坏前采取加固措施。
当前,对边坡稳定及变形进行判断主要通过边坡监测的方式,可通过位移监测墩、测斜孔等获得数据进行分析。其存在以下不足:①数据采集人员作业风险大;②数据采集时间较长,获取速度慢;③技术人员需求量大;④数据分析周期长,时效性差;⑤设备设施维护工作量大。同时,有限测点得到的数据去分析更大范围的区域,可能与现场实际情况不符。工程技术人员测量及分析数据任务较重,大量数字信息直观性不强,这对于更加切合实际及直观的进行边坡稳定性分析有着极大的制约作用。
数字图像测量是近年来新兴的边坡监测技术,与传统方法等比较,具有廉价、高效、稳定、安全的优势[1]。本文主要研究论证对边坡进行图像建模并实现可视化监测的可行性[2]。通过采用现场实际及靶标模拟的方式,在白鹤滩水电站选取了约2 000 m2(通过其它监测数据显示其处于变形阶段)边坡进行了现场试验。通过无人机搭载高清相机对该边坡表面区域进行全覆盖影像获取,再根据不同精度的影像数据源,利用ContextCaptureCenter软件自动输出三角网络模型,复原建模主体的几何形态。最后,采用聚类特征向量空间和更改映射的方式对不同间隔时间点形成的模型进行自动对比分析,通过映像变化达到监测边坡表面位移变化及变形的目的。
1 边坡试验影像获取原理
本次试验影像获取选用Falcon8多旋翼无人机,其为集专业检测航拍于一体的“智能无人机+人工智能”飞机。其基本构造包括:飞行平台、飞行导航与控制系统(飞控系统)、地面监控系统、任务设备(传感器、摄影相机)、数据传输系统、发射与回收系统等。其具有超强稳定性、不受磁场干扰、轻便易携带、超高的工作效率、极致智能航线规划等优点。
表1为本次现场影像获取试验所采用的两种方式。图1为试验现场情况。因对方案的可行性研究及通过模型分析边坡位移变形等有着不确定因素,故通过在边坡上面固定9个靶标,分别进行编号便于区分。同时为了检验不同精度(分辨率)的模型的条件下对比分析的结果准确性,采用两种靶标,它们的不同点在于形状大小以及识别难度高低,如图2所示。

表1 两种试验方案对比

图1 白鹤滩水电站泄洪洞出口边坡实验区域图

图2 现场试验两种靶标图
表2为本次现场影像获取试验整个过程记录。

表2 试验过程记录表
对于整个数据采集流程,通过Falcon8多旋翼无人机配套的航线规划软件ASCTEC NAVIGATOR,对待测区域进行区域标注并按照拍摄距离进行航线设计。为了对比不同分辨率下的模型分析效果,在进行航线设计的时候,通过调整航线与边坡的相对位置设计两个飞行计划,使得无人机分别距离边坡10、20 m。根据边坡的现状,无人机负载即摄像机采用拍摄角度定为-10°,便于获取更多的边坡细节。再通过地面站调整航线的高度,无人机的航向(垂直于边坡走向),航点之间的重叠度(航向重叠60%,旁向重叠80%)、飞行速度(设置为4 m/s)等航线参数,如图3所示。

图3 实验航线设计图
按照规划的航线,于2019年5月及7月使用无人机自动执行所规划的航线,以10 m/s的速度进行数据不间断的获取。航线效果如图4所示。

图4 现场实验航线效果图
作为整个实验研究中极为重要的一环也是最基础的一环,需对数据的完整性及质量好坏进行检查。影像数据不仅仅是相片,其中还包含了无人机自身所赋予影像的pos信息,即无人机的航点位置信息以及相机的姿态等信息[3]。数据质量的好坏检查根据人眼视觉感受即可,选取百分之五左右的相片进行检查,观察相片的详细参数以及多个相片之间的色差大小,最重要的就是检查相片是否具有POS信息,如图5所示。
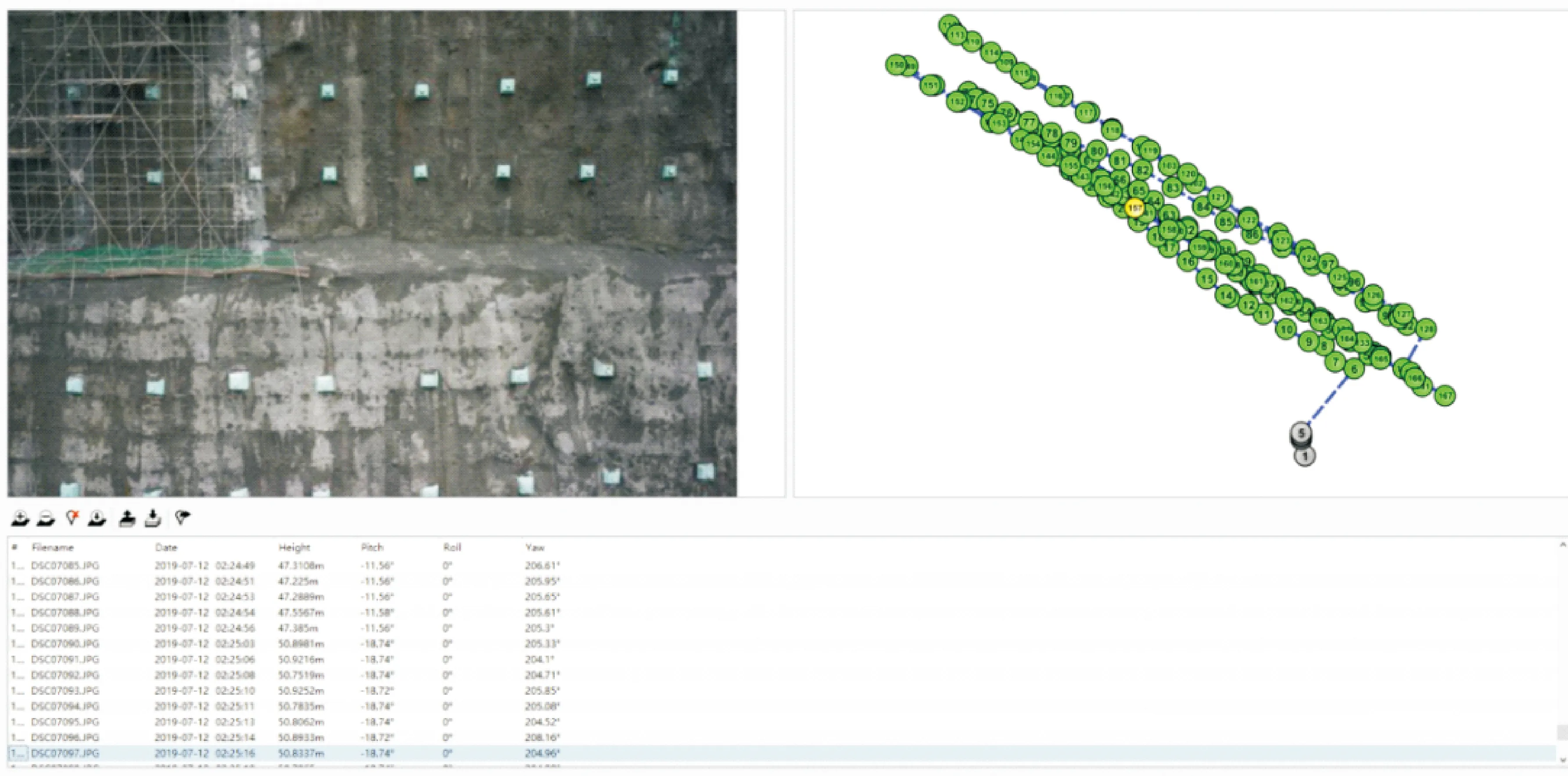
图5 实验数据完整性及质量检查图
2 边坡图像三维模型创建
通过前面获取的影像数据,采用ContextCaptureCenter建模软件对待监测边坡进行精细化建模。ContextCaptureCenter (CC)是一款软件解决方案,可在无任何人工干预的情况下,基于简单的影像或基于点云生成高分辨率三维模型[4]。
无人机10 m飞行高度模型成果与20 m飞行高度模型成果分别见图6与图7。
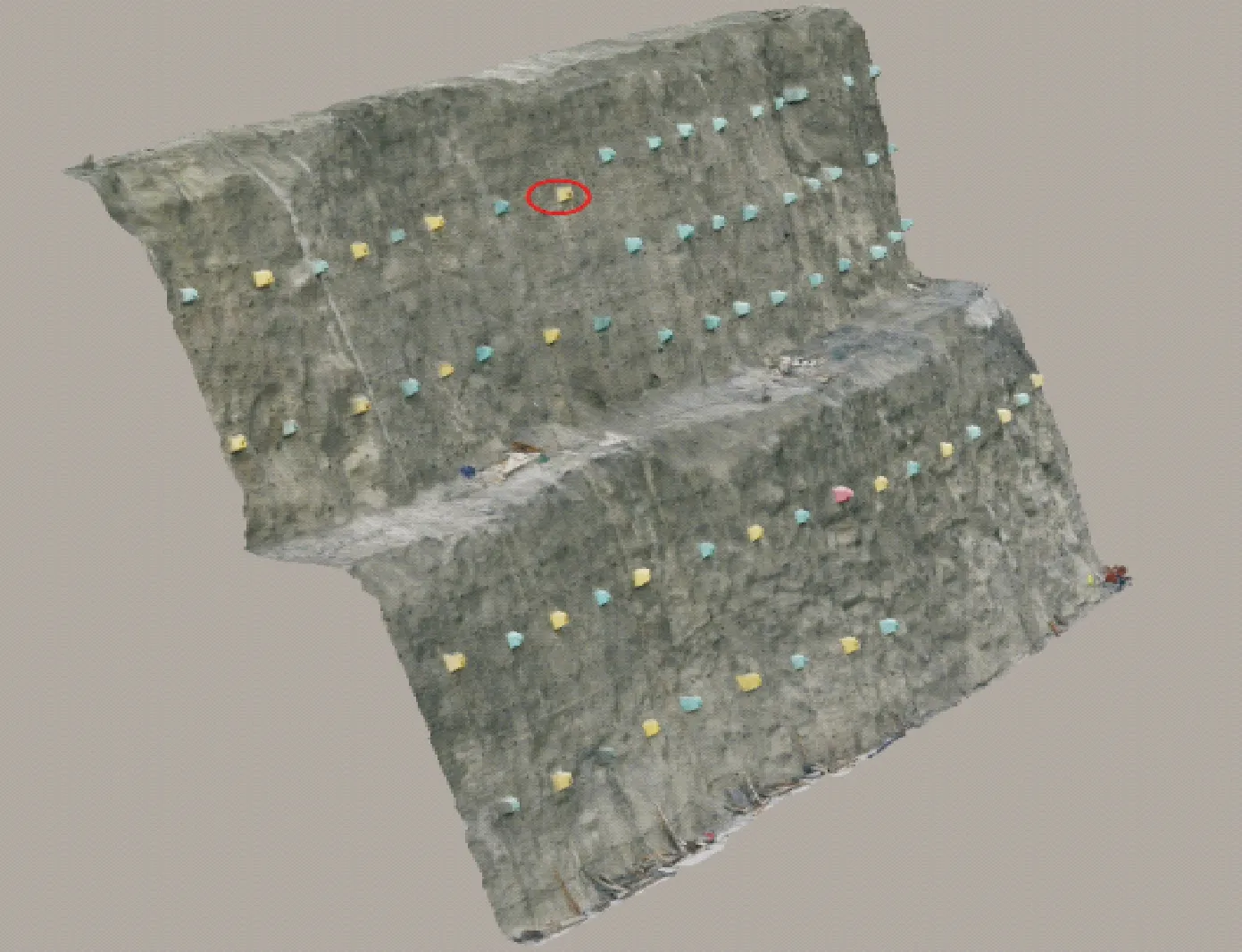
图6 10 m飞行高度模型图
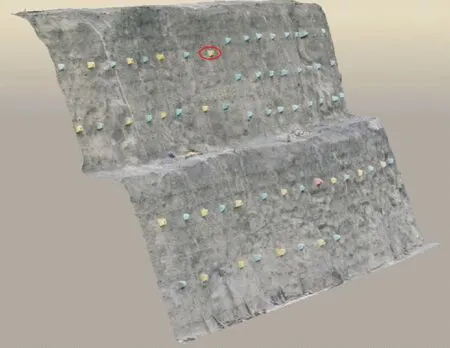
图7 20 m飞行高度模型图
将10 m与20 m飞行高度后生成的模型进行细节对比,以论证不同精度的建模效果,见图8。

图8 10 m与20 m飞行高度后生成模型细节对比图
通过图8可以看出,10 m飞行高度后生成模型分辨率明显高于20 m飞行高度后生成模型。且通过数据整理分析,采用10 m的数据源,实现建模图像分辨率低于7 mm。
3 边坡图像三维模型对比及图像分析
在不同时间获取的区域图像称为多时间图像,变化检测涉及分析两个多时间图像以及两个多时间模型以找出两个时间之间可能发生的任何变化。此对比检测异常方法涉及自动分析变化数据,即差异图像,使用多时间图像构建。差异图像是2个图像的逐个像素减法。然后,通过主成分分析(PCA)提取来自差异图像的像素块的特征向量。随后,通过将该像素的邻域投影到特征向量上,为差异图像中的每个像素构建特征向量。特征向量空间是所有像素的特征向量的集合,在通过K均值算法进行聚类时给出了两个聚类——即一个表示属于改变的类的像素,另一个表示属于未改变的类的像素。每个像素将属于任一簇,因此可以生成变化图。变化图为黑白图,通过分析该图像,可以得到具体变化[5]。
根据现场实际情况得到试验成果,将7月与9月的两个模型对齐,像素对比得到图像的差分图见图9。对比现场试验过程记录照片,差分图中出现的三个白点,为现场堆存物资挪动,点位发生变化而形成的成果。
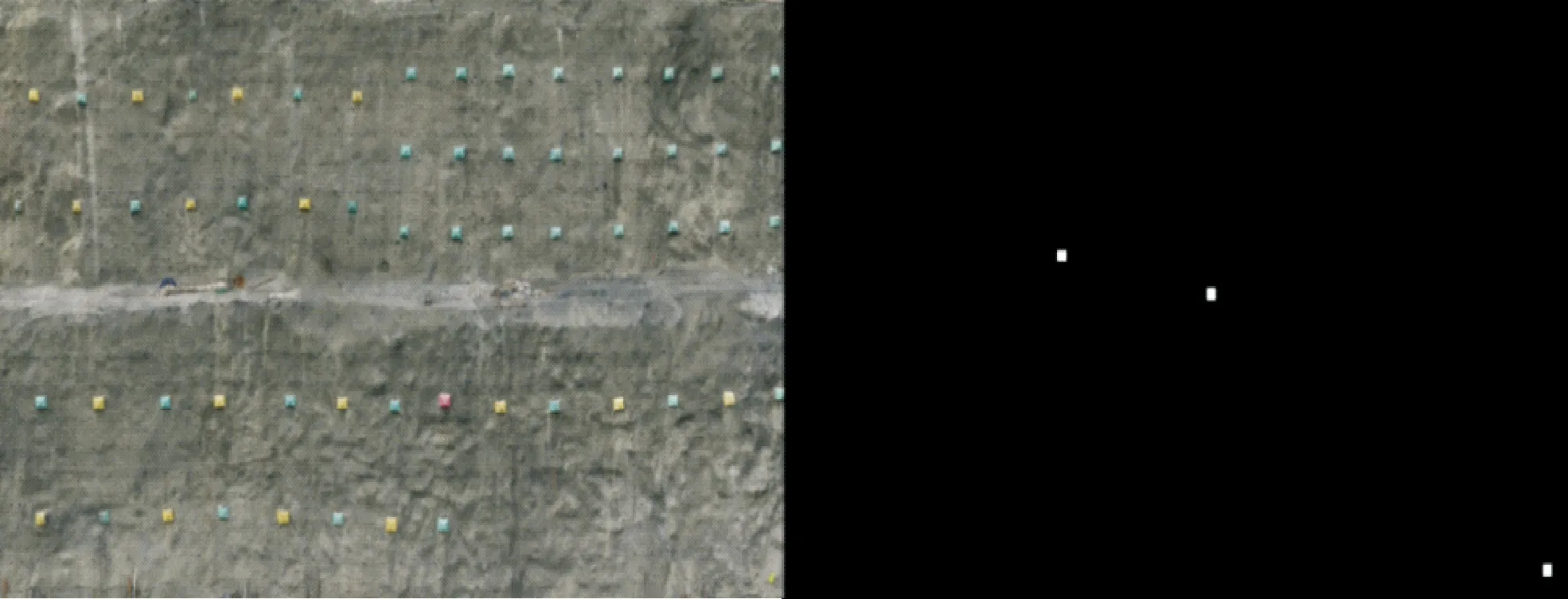
图9 现场实际情况得到黑白差分图
将两组模型对比后得到差分图成果,如图10~图16所示。

图10 1号靶标移动前后分析图
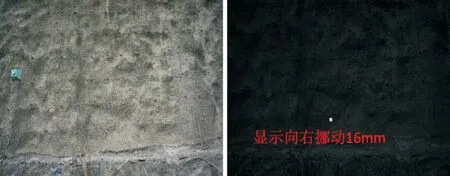
图11 2号靶标移动前后分析图
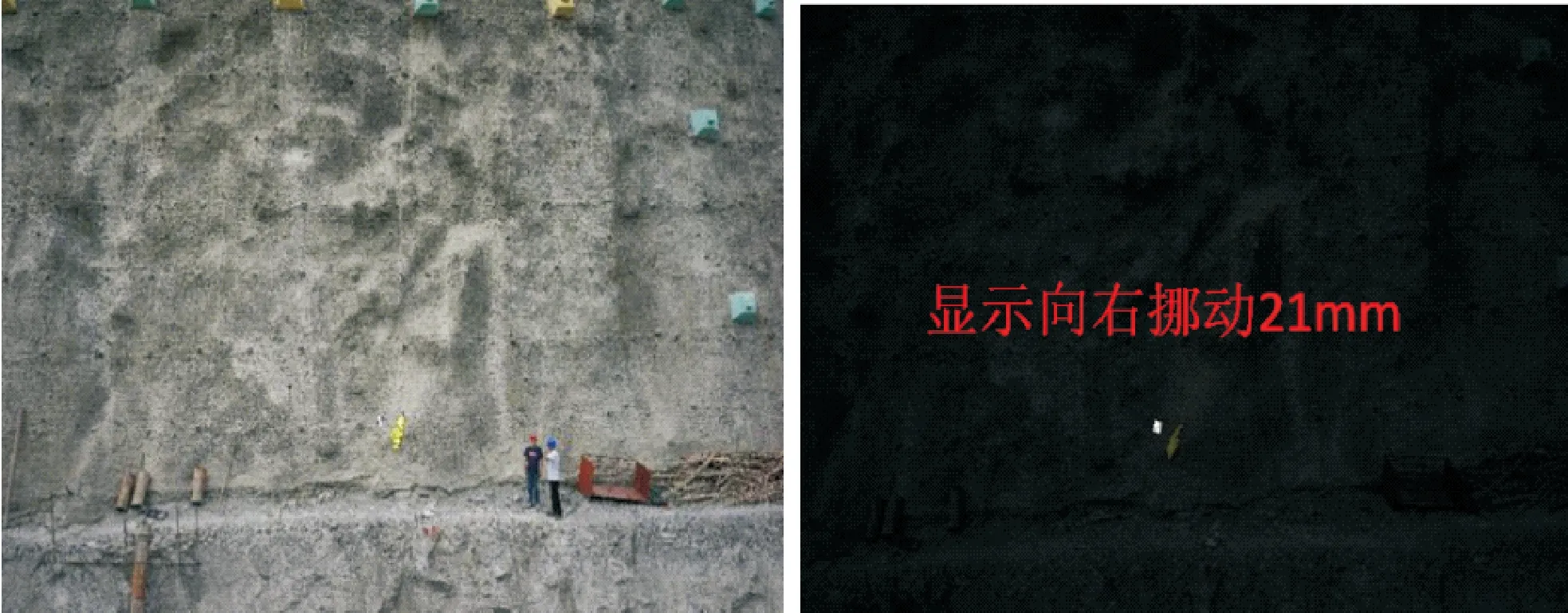
图12 3号靶标移动前后分析图

图13 4号靶标移动前后分析图

图14 5号靶标移动前后分析图

图15 6号靶标移动前后分析图
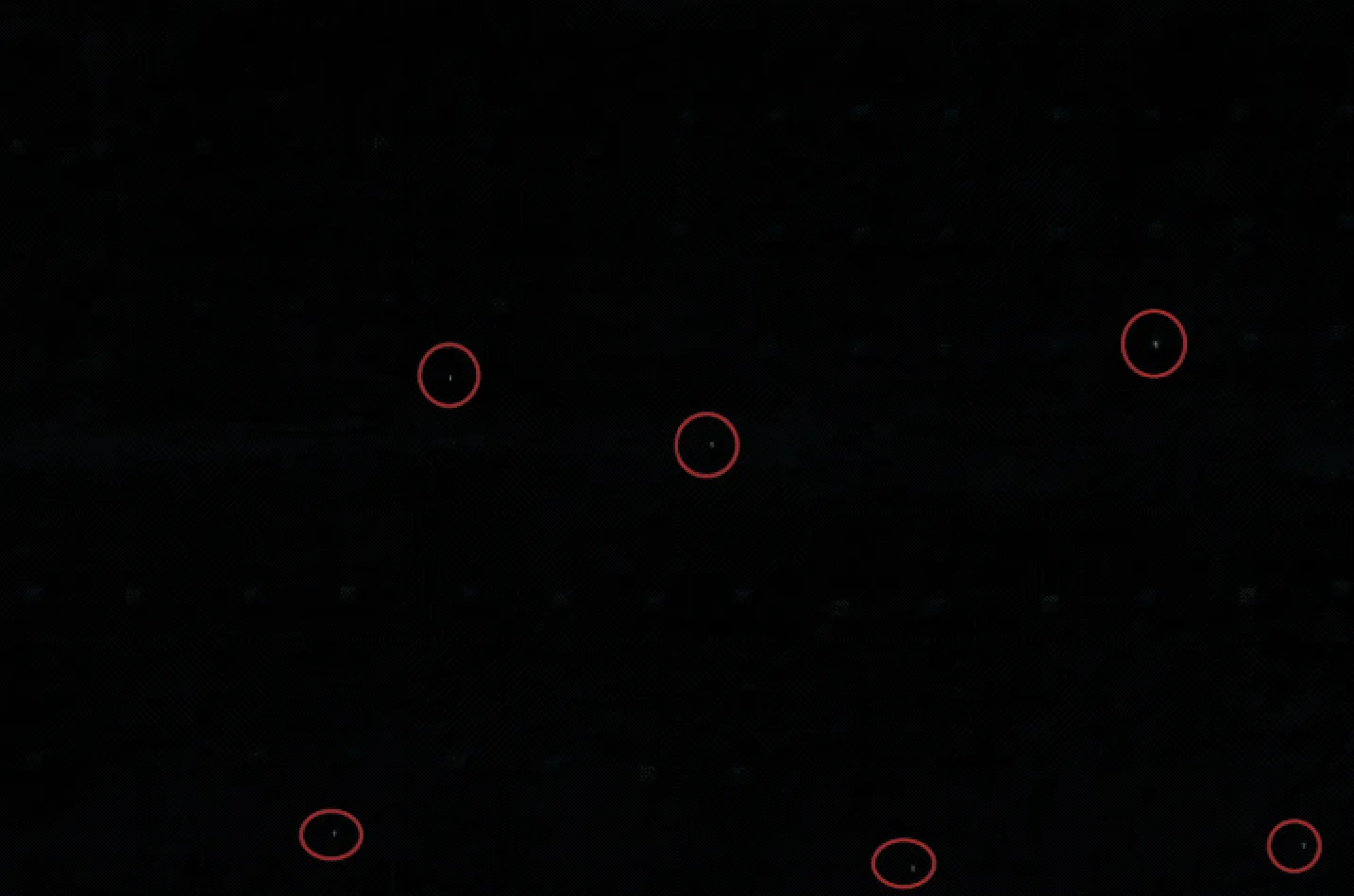
图16 6个靶标移动形成差分图整体效果图
在约2 000 m2实验区域内,白鹤滩水电站监测中心已有测点TPXCP-1-3,其位于泄洪道出口边坡751高程。根据监测中心数据,TPXCP-1-3测点2019年5月累计水平位移最大为5.68 mm,7月累计水平位移最大为7.01 mm,7月与5月累计水平位移差约为1.33 mm。根据现场实际情况得到差分图(分辨率为7 mm)显示,该TPXCP-1-3测点未出现水平位移变化,因1.33 mm小于7 mm,差分图未出现白色差异点,属于正常范围,实验成果合理。现场实际情况得到的差分图中显示三个白点,为现场物资设备挪动部分,实验成果合理。
实验时对其中6个靶标整体水平右移20 mm,差分图中均能显示其水平位移发生变化,且均向右侧移动了16~22 mm,数据合理,精度满足要求,达到了实验预期成果。
4 结 语
大坝近库岸边坡的稳定对于电站枢纽区水工建筑物的安全稳定运行至关重要,针对现有人工现场采集数据后进行分析的边坡监测方式,本文创新性的提出基于边坡三维模型创建的数字图像监测法,提供了一种新的途径用于边坡监测。
本文主要研究成果与结论如下:
1)充分论证了图像建模的监测方式可用于水电站边坡及重点部位变形监测。
2)对边坡进行图像建模及可视化监测的可行性研究表明,该监测方式主要优点如下:①与传统的变形监测方式相比,该法更适合边坡表面的缓慢或匀速变形阶段的滑坡监测;②不同时间阶段形成的边坡三维模型成果,可直观动态的分析边坡表面位移变化过程,达到安全隐患预警的目的;③该方法具有设备简单、操作简便、数据采集和处理速度迅速、自动化程度高、可覆盖整个边坡表面等传统测量方法无可比拟的优点,能够快速、高效、安全、无接触地对边坡选定区域进行测量[6];④通过设置无人机影像获取时的飞行高度,以形成不同分辨率的三维模型,边坡测量精度可达到毫米级,满足现有监测精度的需求。
