基于OKNN的目标战术意图识别方法 *
2021-07-21刘秋辉崇元
刘秋辉,崇元
(中国人民解放军91550部队,辽宁 大连 116023)
0 引言
态势分析过程不仅需要了解单平台或群平台对象的作战知识[1]以及他们的当前属性,更需要从当前相关平台间的关系中推导出有意义的结论[2],即形成有关敌方作战计划、作战意图等更高层次的作战知识,从而为作战指挥提供辅助决策。
意图识别问题按战场环境可分为海战场、陆战场、空中战场意图识别,按战争规模可分为战略意图识别、战役意图识别和战术意图识别[3-4]。本文将对目标阶段性作战计划进行分析,进而对目标战术级意图进行识别。
目前关于作战计划识别的主要方法是基于逻辑假设的形式化计划识别推理模型[5-8],其基本思路是对计划库进行构建,通过对历史战例、演习训练的战场态势数据和信息进行学习、总结,分析出与观测作战平台在某一阶段行动过程中从其发生的战场事件、行为序列,到其所追求目标以及实现这一目标的计划过程所相关的战术规则,将该规则存入到计划库,并在实际对抗中将实时观测的目标数据与计划库进行匹配,推理出敌方的作战计划。然而,上述方法的推理过程需要建立一个自顶向下详细分解的敌方计划假设层次结构,但由于博弈问题随着双方态势的变迁而动态变化,这种结构应对动态态势分析问题具有良好的适应性。另外,通过观察、情报得到的或已知敌方的各因素都是不完全透明的,所获取的目标数据与信息中都可能存在着欺骗、干扰、伪装等因素,并带有一定的不确定性[9]。这种低层的不确定性,通过横向和纵向向上传递就会带来不确定性的集成问题[10-11]。因此,计划假设的结构层次是一个不确定性的集成和传递过程,现只对计划库进行设计将很难满足高效的识别要求。
针对以上问题,本文从构建基于计划识别的目标战术意图推理框架入手,将战场实时获取的目标动态作战知识作为解释敌方作战行动过程(enemy campaign operation action,ECOA)的行动要素,并通过构建基于作战知识神经网络(operation knowledge neural network,OKNN)的目标行动片段集对ECOA加以描述,同时建立具有自适应实时战场态势的推理机制,最终得到基于计划识别的阶段性战术意图推理结果。该方法可以提高计划识别模型表达能力的灵活性,并有效解决了计划假设不确定性的集成与传递问题。
1 目标战术意图推理框架
传统计划识别方法[5,12]是看作由某种计划假设H,与根据对敌方认知、理解以及战场情报形成有关敌方计划的知识库PL,对敌军行动观察O的推导解释过程。因此,其主要工作是对计划库进行组织与设计。但由于所观察的目标数据与信息常带有一定的不确定性,致使其在与计划库匹配时将造成上述不确定性的累计叠加,纵使有较好组织与设计的计划库,也往往会造成计划推理的失败。
作战过程中包含大量的不确定性,其来源包括[13-14]:
(1) 战场感知的不确定性(如有关目标的战术特性与物理特性);
(2) 关于敌方战术知识的不确定性(如作战样式、规则等);
(3) 敌方作战能力的不确定性。
显然,传统计划识别的不确定集成与传递问题是由战场感知的目标信息不确定性和关于敌方战术知识的不确定性,以及在与计划库匹配时的静态推理方法而造成的。这是由于直接使用传感器获取的目标信息与计划库匹配时,需使用目标属性特征与先验敌方战术知识匹配的静态推理方法以得到推理过程的中间以及最终结果,这种大量依赖先验知识的推理过程将导致证据不确定性的不断累积而得不到消减。因此,如何减少证据输入的不确定性以及改善静态推理过程所造成的弊端是目前急需解决的问题。
敌方一次阶段性作战行动过程需分解为多个战术行动来完成,不同战术行动所表达的战术意义是阶段性战术意图推理的重要依据,由于敌方战术行动分解过程对我方几乎不透明,因此我方态势分析人员往往需要对所获取的目标数据与信息进行分析,并解释目标在一次作战行动过程中所执行的战术行动,才能推理得到敌方在此次行动过程中的作战意图。另外,作战知识描述的是隐藏在目标数据与信息之后的战术任务、作战意图等关于作战行动原则方面的内容,敌方是不会“主动”提供的,因此,作战知识的获取就是对敌方作战过程中的关键行动点进行建模,以揭示敌方在某一时间段内所执行的子计划。对于一个特定的战术意图来说,我方态势分析人员可通过目标在作战过程中的战术行动要素,以及对行动要素关系的分析来识别出隐藏在其背后的作战知识,这些由作战知识反映的子计划共同服务于上级指派的作战任务,其会在不同程度上反映出敌方的战术意图。
由于作战知识可以通过大量的作战数据与信息,并结合人工智能方法进行实时动态挖掘,这一动态挖掘过程在一定程度上考虑了由于伪装、欺骗带来的证据不确定性问题。同时,该过程减少了与计划库匹配工作的量度,并随之减少所依赖的静态作战知识,以达到减少不确定性的目的。
本文重新对计划识别过程进行解释:定义目标数据与信息O为观察集,K为经智能获取方法推理出的隐藏在数据与信息之后的目标动态作战知识集,PL为关于被观察目标的静态知识计划库,H为对敌方目标建立的计划假设集,从而可将战术意图识别看作由H与PL对由K组成某一阶段作战行动过程C的推导解释。它将构成一个四元组
definitiona)Plan-reasoning(PL,K,C)=H,
b)Sequential-logic(K1,K2,…,Kn)=C.
以上描述反映了基于作战知识进行阶段性战术意图识别的实质,其中目标动态作战知识集K反映了一个对侦察获得的目标数据进行逐层深入理解,逐步得到指挥员所需要的隐含在作战信息之后的作战知识,即从获取底层作战知识逐步上升到获取高层作战知识的逻辑结构。在此基础上,可以展开对不同层次作战知识的有效组织与整合,建立动态作战知识库,为实际战术意图识别奠定逻辑基础。
2 目标战术意图识别模型
2.1 基于OKNN的目标行动片段
对敌方作战行动过程进行描述时,需要涉及到分布的战场资源和各作战平台,其要识别的不仅包括某个作战平台的类型、所执行的战术任务,更重要的是通过多个作战平台的行为和战术特征判断来袭目标是否形成了具有一定战术意义的空间群、以及多个空间群之间是否存在相互协同、配合模式。以上各要素都归属于作战知识范畴,并构成敌方阶段性战术意图这一更高层次作战知识推理的必要条件。
人工神经网络具有并行信息处理、分布信息存储以及信息处理单元的互连特性。依据以上特点,本文将神经网络应用到敌方战术意图的推理当中,不同战术平台与战术群的作战信息与作战知识可并行处理以增强模型推理的灵活性,另外根据作战平台与空间任务群、空间任务群与相互作用群之间的依赖关系及其各自阶段性意图递推结果,可最终融合推导出敌方的作战意图,其阶段性信息处理单元相互连接,前者为后者的必要条件。
为此,本文在逐步得到关于作战行动原则方面的动态作战知识后,以作战知识神经网络(OKNN)表示目标平台行动片段的形式作为意图推理的证据基元,如图1所示,以适应战场态势动态性变迁问题,在一定程度上可减少意图识别过程中不确定因素的集成与传递。
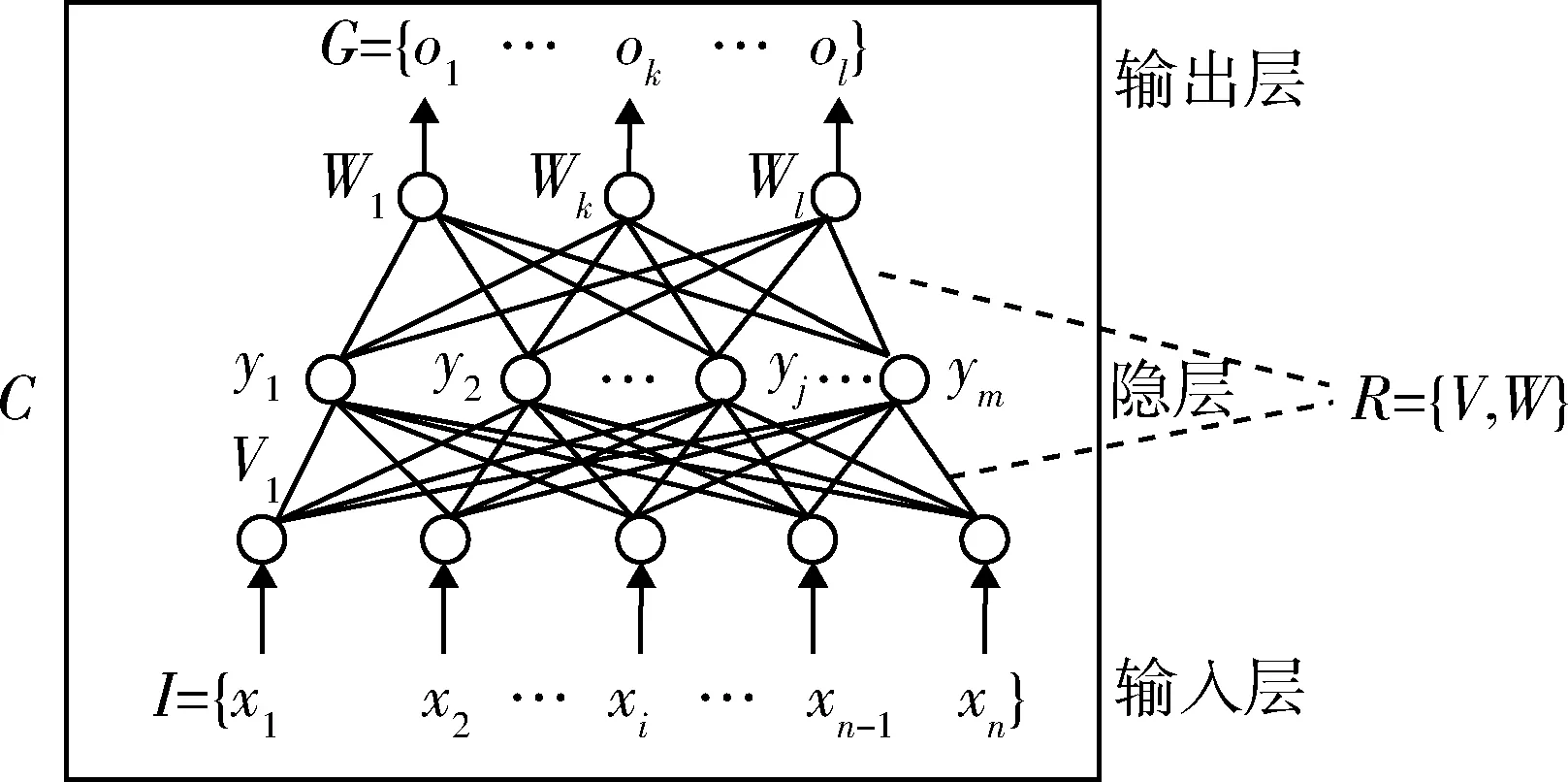
图1 描述目标作战知识行动片段的神经网络模型Fig.1 Targets action frags based on neural network
定义:一个目标作战知识神经网络(OKNN)可形式化定义为一个四元组ONF=
在基于作战知识神经网络(OKNN)逻辑中,阶段性战术意图表示为OKNN实体行动片段(ONFrags)的证据组合集合,一个实体片段以多平台或单平台组成的空间任务群,以及由空间任务群构成的相互作用群为神经网络模块单位,表示在给定作战知识和网络经验权值下的阶段性战术意图概率分布。实体片段反映了识别阶段性战术意图所需要的作战知识与作战信息,每个神经网络片段将作为一个战术意图识别的推理证据。
以目标群为单位的OKNN实体片段形成了多平台作战知识表示的一个单元,作战知识通过动态实时挖掘,并通过一组OKNN实体片段来不断更新敌方在某一阶段作战过程中的意图空间分布。这为由于输入信息的不确定性以及静态推理造成的不确定性集成问题提供了一种可行的解决途径,同时在对某一阶段作战行动过程的推导解释中,该实体片段便于匹配上下文语境,通用性较强。
以空间任务群以及相互作用群为单位,采用OKNN表示的目标平台行动片段的网络结构如图2所示。
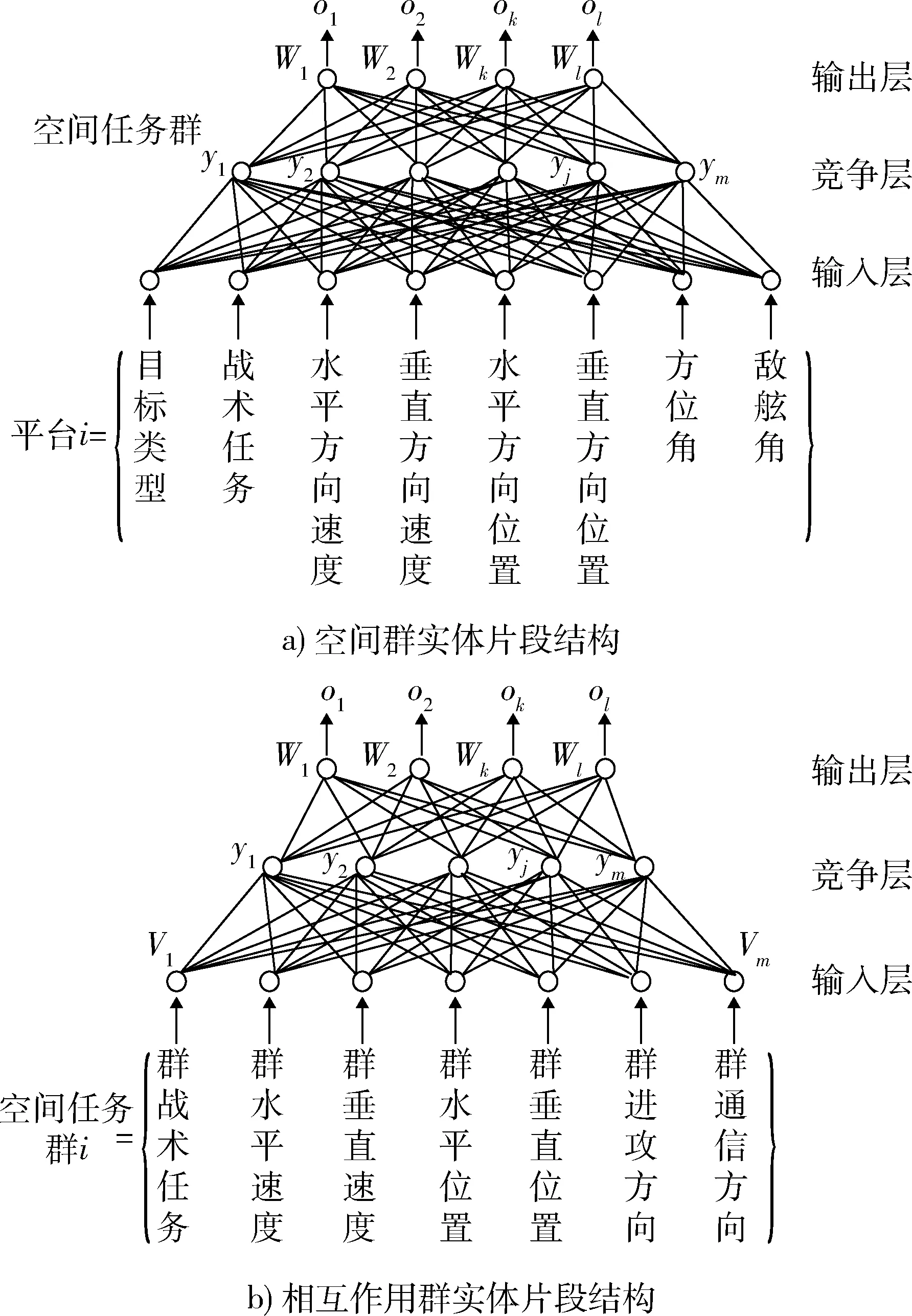
图2 基于OKNN的目标群实体片段结构Fig.2 Structure of target group frags based on OKNN
当构建完成上述以目标群为单位的基于OKNN的平台目标行动片段后,则还需建立该领域内的计划库PL,才能对敌方阶段性战术意图的空间分布进行求解。根据第1节中对目标战术意图推理框架的描述,计划库同样需采用以OKNN结构表示的目标行动片段进行描述,该计划库将包含达成敌方作战意图的作战计划,以及实现该计划的完整OKNN片段的行动序列。构建计划库中OKNN目标行动片段的关键在于求解经训练得到的目标行为先验规则V和W,该规则按网络各层2种学习规则训练好之后存入到计划库中,由于篇幅限制,计划库中目标OKNN训练过程将不展开描述。
2.2 模型的运行与推理
然而,世界上没有两场完全一样的战争,虽然通过将敌方一次作战行动过程进行分解,形成若干个以OKNN片段为组织形式的战术行动,可以在一定程度上解决敌方作战行动过程的动态构建问题,但要想使得模型的推理过程不断动态适应实时战场态势变化需求,就还需从改变传统的在与计划库中知识组织模式的固化推理机制入手,对有反馈的态势分析过程进行建模才可从根本上解释动态计划识别过程的本质。
由于网络片段可以匹配存在一定范围内偏差的战场态势输入信息,因此使用以上计划库中固定模式的推理规则V和W,也将得出适应于此次输入信息的战术意图概率分配导向。但为追求意图推理的客观性,满足匹配条件的偏差值需在适度范围内,偏差值越小,则匹配条件越苛刻,并容易出现实时行动片段无法从计划库中匹配计划片段的现象;但偏差值越大,平台行动片段虽然容易匹配,但所匹配的计划库中实体片段已不能对实时战场态势进行有效描述,因而利用该计划库中片段进行推理的结果将会向其真实意图结果偏离。造成以上现象的原因是没有形成自适应于本次作战行动过程的推理规则。
为此,本文利用神经网络的误差反馈推理机制,将实时的阶段性战术意图概率分配结果向量U(t)作为期望输出,而将计划库中选用的基于OKNN片段的样本输出向量结果dp作为实际输出,用以修正各单元权值向量。那么网络两层误差信号为
(1)
(2)

(3)
(4)
战场态势随着时间的推移,逐渐有新信息的输入,并得到新的行动片段推理规则,同时OKNN平台行动片段的阶段性战术意图推理规则可逐渐适应本次作战行动,而不始终依赖计划库中的模板规则。
模型将实时获取的敌方作战知识描述为单平台或多平台的目标群OKNN实体片段,节点为带参数的随机向量,如图2所示。当发现空中有敌方目标时,我方态势分析人员实时动态获取单平台战术类型、平台执行战术任务等作战知识,并结合平台作战信息共同作为推理依据,用以揭示敌方目标进行集群作战时所形成的空间任务群以及相互作用群等高层次作战知识。将目标所形成的空间任务群以及相互作用群作为网络单元构建OKNN实体片段,并实例化网络片段输入项的随机变量进行阶段性战术意图推理。按照时序逻辑关系,每个OKNN实体片段将作为阶段性战术意图识别的推理证据,意图空间的分布结果取决于计划库中目标OKNN行动片段的训练权值V和W,该权值通过证据更新来训练修正。阶段性作战意图识别过程可以描述如下,算法流程如图3所示。

图3 基于OKNN的战术意图识别算法流程 Fig.3 Algorithm flow of tactical intention recognition based on OKNN
(1) 构建计划库中基于OKNN的目标行动片段,以及训练该片段的目标行动规则;
(2) 实时构建由单平台及多平台构成目标群的OKNN实体片段,并作为阶段性战术意图识别的输入证据;
(3) 检索计划库中的目标平台行动片段,并匹配实时动态构建的行动片段;
(4) 按照证据的时序关系,将匹配成功的目标行动片段的网络权值作为推理规则,并建立具有自适应实时战场态势的推理机制,对目标战术意图进行识别。
3 实例分析
假设通过目标提取,发现敌方有11个战斗目标,需要指挥员阶段性给出敌方进攻、防御或监视战术意图。以战场中探测到的平台参数信息以及作战知识为证据进行推理,该场景中敌方的阶段性战术意图识别过程如下:
(1) 获取事件1:识别作战平台类型、执行的战术任务等作战知识。目标观测数据以及经知识发现技术实时获取的单平台和多平台作战知识如表1所示。其中,战术任务对应关系为(侦察=1,干扰=2,攻击=3,护航=4)。敌方作战平台所执行的战术任务识别方法见文献[15]。

表1 目标信息参数以及作战知识Table 1 Targets information parameters and operational knowledge
(2) 获取事件2:识别空间任务群,并给出群平均参数,如表2所示。
(3) 获取事件3:识别相互作用群。本文将相互作用群定义为,具有协同增益作用效果的空间任务群。这里的协同增益效果主要体现在目标群的战术任务以及通信情况是否存在相互协同、配合的模式。另外,目标群的空间位置、进攻方向等也将增添相互作用群的战术状态判别依据。相互作用群的判别可以提供给指挥员更深层次上的战场态势内容。表2中群集合{{1,2,3,4}与{5,6,7,8}}是2个相互作用群。空间任务群以及相互作用群的识别方法见文献[16]。

表2 空间任务群参数表Table 2 Parameters of space task group
现假定已建立计划库中由单平台或多平台所组成目标群的OKNN实体片段意图推理规则,将关于单平台作战知识的空间任务群1~8以及相互作用群{1,2,3,4}与{5,6,7,8}分别构建OKNN实体片段,动态构建的实体片段将作为推理证据与计划库中静态OKNN实体片段匹配,所得的融合阶段性战术意图空间分布如表3所示。其中,证据m1~m8为空间群1~8在辨识框架上的概率分配函数,m9,m10为相互作用群1,2的概率分配函数。
从表3可知,当输入证据为空间群实体片段时,融合阶段性战术意图A1的可信度为0.390 0,而A3的可信度也有达到0.307 0,但随着相互作用群实体片段证据m9与m10的加入,战术意图A1的可信度可达到0.765 5,而A3的可信度也骤降到0.113 0,根据判决规则可判定敌方本次作战的战术企图为A1,即敌方可能对我发起进攻,这与实际情况是相符的。
4 结束语
由于军事问题本身的动态性和复杂性,使得计划识别过程充满了大量的不确定性,并导致了动态不确定性的集成与传递问题。本文采用基于作战知识的神经网络来表示战术意图识别问题,并以空中目标群为单位,通过实时动态构建OKNN实体片段进行战术意图推理,该方法可减少不确定性的集成与传递并增强模型推理的灵活性和语义表达能力。但由于双方对抗阶段时间紧迫,考虑模型推理的实时性并预测敌军将来的可能作战行动是下一步研究工作的重点。
