一种基于深度相机的非规则包裹体积计算方法
2021-07-20李永泮张维忠罗桂富
李永泮 张维忠 罗桂富

摘要: 针对传统的物体体积计算方法难以准确计算实际邮寄中非规则包裹(简称异形件)体积的问题,本文提出了一种新的基于深度相机的异形件体积计算方法。通过深度相机获取深度图像,利用计算机视觉中的膨胀及腐蚀等图像处理方法对深度图像进行形态学处理,去除实验场景中存在的大量噪声,利用体积与深度值的关系计算出包裹的体积,最后将该算法在青岛邮区中心局及威海邮政进行大量的测试实验。实验结果表明,该算法的计算精度达97%以上,有效解决了邮局中大量异形件无法准确计算体积的问题,为计算货车实际装载率提供了重要的理论依据。该研究能够满足包裹实时精准的体积测量要求,具有一定的工程应用价值。
关键词: 深度相机; 深度图像; 异形件; 体积计算
中图分类号: TP391.41 文献标识码: A
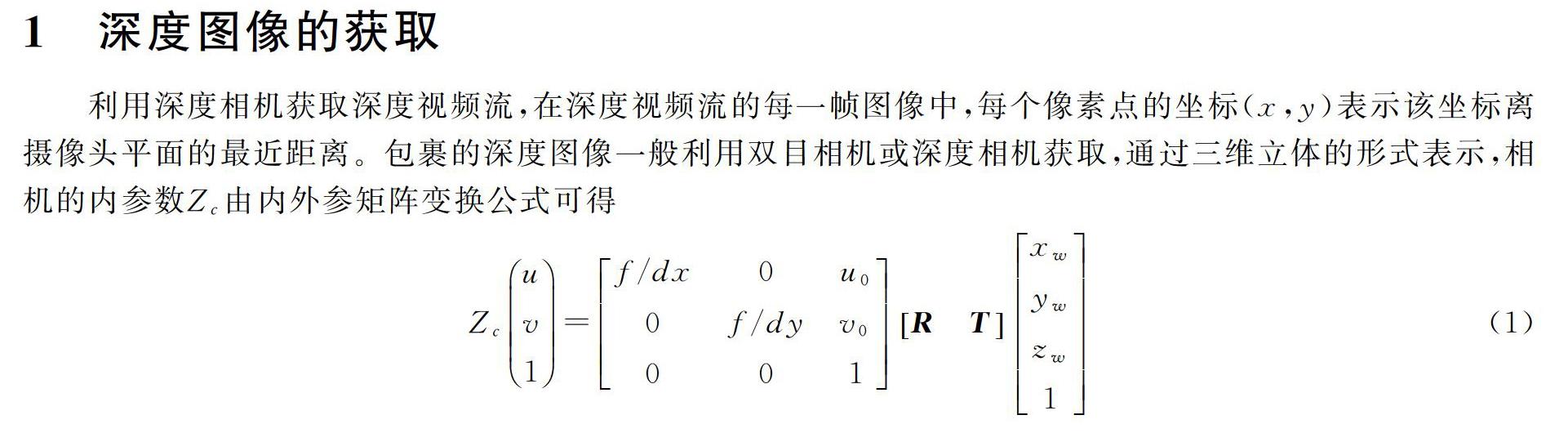
3 体积计算
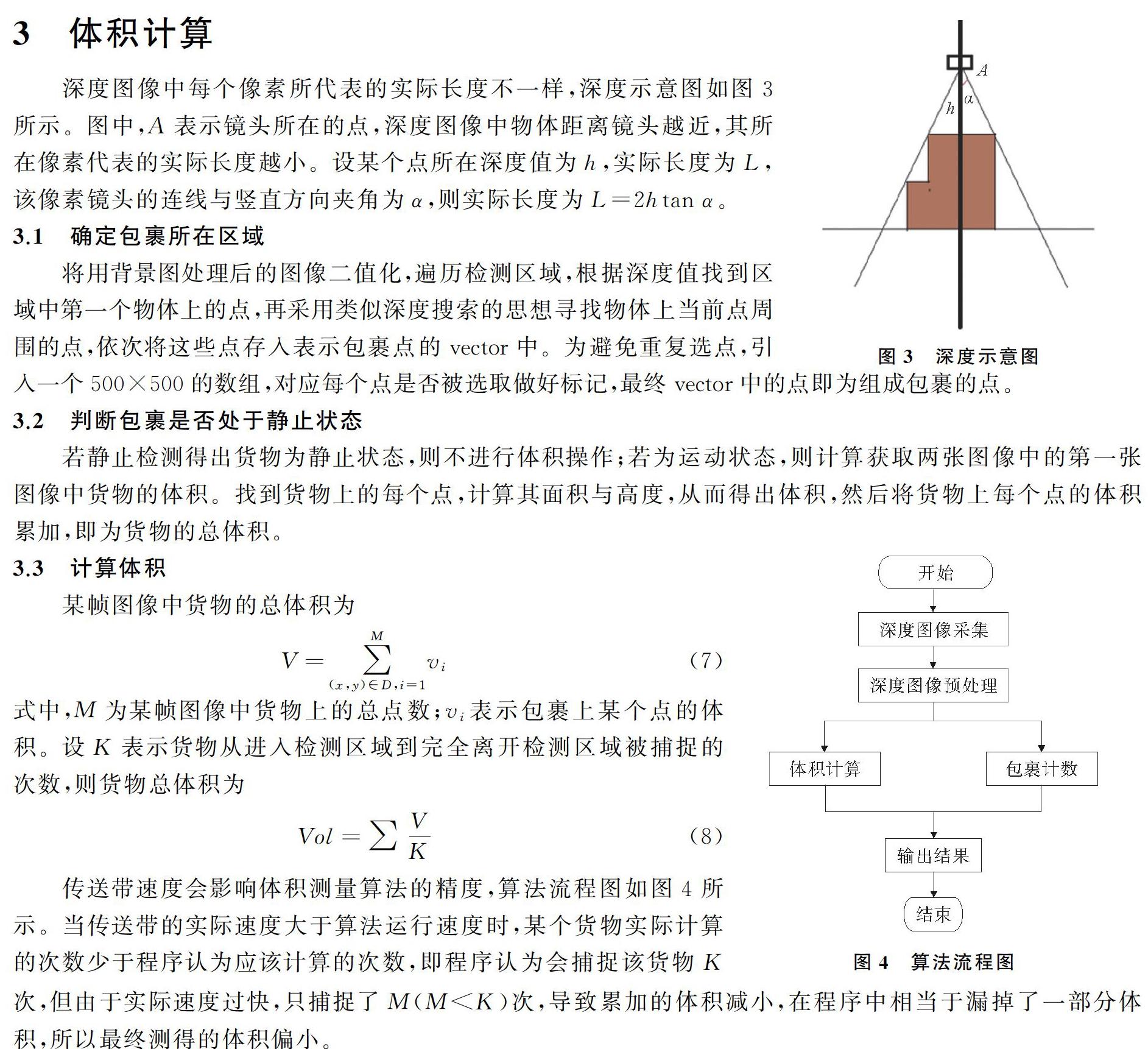
深度图像中每个像素所代表的实际长度不一样,深度示意图如图3所示。图中,A表示镜头所在的点,深度图像中物体距离镜头越近,其所在像素代表的实际长度越小。设某个点所在深度值为h,实际长度为L,该像素镜头的连线与竖直方向夹角为α,则实际长度为L=2htan α。
3.1 确定包裹所在区域
将用背景图处理后的图像二值化,遍历检测区域,根据深度值找到区域中第一个物体上的点,再采用类似深度搜索的思想寻找物体上当前点周围的点,依次将这些点存入表示包裹点的vector中。为避免重复选点,引入一个500×500的数组,对应每个点是否被选取做好标记,最终vector中的点即为组成包裹的点。
3.2 判断包裹是否处于静止状态
若静止检测得出货物为静止状态,则不进行体积操作;若为运动状态,则计算获取两张图像中的第一张图像中货物的体积。找到货物上的每个点,计算其面积与高度,从而得出体积,然后将货物上每个点的体积累加,即为货物的总体积。
传送带速度会影响体积测量算法的精度,算法流程图如图4所示。当传送带的实际速度大于算法运行速度时,某个貨物实际计算的次数少于程序认为应该计算的次数,即程序认为会捕捉该货物K次,但由于实际速度过快,只捕捉了M(M 当传送带的实际速度小于算法运行速度时,某个货物实际计算的次数多于程序认为应该计算的次数,即程序认为捕捉这个货物K次,但由于实际速度过慢,包裹被捕捉到M(M>K)次,导致累加的体积增多,相当于重复计算了一部分体积,导致最终测得的体积偏大。特殊情况下,当货物静止不动时,程序会重复计算当前帧下的包裹体积,导致MK,因此计算得出的实际体积结果也会远大于真实体积值。 4 结果与分析 将该算法应用于青岛邮区中心局和威海邮政进行大量的实验验证。通过在邮局实地搭建深度相机,模拟邮局进行装车时的场景,利用相机实时进行体积计算,实验中包含大量规则包裹及异形件,数据样本量充足。 首先对规则包裹进行模拟体积计算,规则包裹体积计算准确率如表1所示,表1中,准确率=(abs(包裹真实体积算法测量结果)/包裹真实体积)×100%, 然后模拟异形件体积计算。因为异形件的实际体积不方便测量,本文采用选取固定体积大小的笼箱(青岛邮区中心局的笼箱容积是09 m3),把异形件装在笼箱内,且尽量装满不留空隙,然后用算法计算该笼箱内全部包裹的总体积,以此作为算法准确率的依据。非规则包裹体积测量准确率如表2所示。由上述实验结果可以看出,与传统的物流包裹体积计算算法相比,本文提出的算法不仅对规则包裹的体积计算准确率较高,而且异形件体积的计算准确率也达97%以上。因此,该算法适用于邮局实际场景中各种情况下包裹的体积计算,拥有较好的鲁棒性。 5 结束语 针对计算物体体积的传统方法难以解决实际邮寄中非规则包裹(简称异形件)的体积计算问题,本文提出了一种新的基于深度相机的非规则包裹体积计算方法。该算法利用形态学处理去除噪声,通过计算机视觉方法对包裹进行精准定位,并对包裹在深度图像下每个像素点体积的累加得到总体积,最后在青岛邮区中心局和威海邮政进行实验验证。实验结果表明,该算法具有较高的准确率,满足邮局对车辆装载率精确计算的要求。该研究为智慧物流的建设提供了一种精准实时的体积计算手段,不仅能对规则包裹的准确率有很好的延伸,并且针对非规则包裹的体积计算提出了新的思路。下一步的研究重点是当若干包裹堆叠或包裹底部有空隙等情况的包裹体积计算问题。本算法还可结合动态秤及扫码相机对每个包裹的信息准确匹配,从而实现包裹信息的统一化,便于邮局和用户准确掌握包裹动向。 参考文献: [1] 冯相如. 基于二维图像规则物品体积计算方法研究[D]. 合肥: 中国科学技术大学, 2020. [2] 冯相如, 朱明. 基于单视图3D重建的快递纸箱体积测量算法[J]. 计算机系统应用, 2020, 29(10): 192198. [3] 邵宝峰. 基于点激光和双目视觉的货物尺寸测量的研究[D]. 大连: 大连理工大学, 2016. [4] 张巍, 杨忠根. 基于模型的单视图线性自标定及三维重建算法[J]. 电脑知识与技术, 2008(15): 10651067. [5] 张葆成. 摄像机自标定及三维重建算法研究[D]. 上海: 上海海事大学, 2006. [6] 宓逸舟. 基于双目视觉的快递包裹体积计量系统[D]. 合肥: 合肥工业大学, 2017. [7] 刘翔. 多阈值OTSU快速算法的研究[D]. 长春: 吉林大学, 2017. [8] 王安, 王芳荣, 郭柏苍, 等. 基于边缘检测的视差图效果优化[J]. 计算机应用与软件, 2019, 36(7): 236241. [9] 孙鹏, 马鹏博, 郎宇博, 等. 结合SURF算法的双目视觉测距方法[J]. 中国刑警学院学报, 2020(5): 110116. [10] 张志刚, 霍晓丽, 周冰. 基于双目立体视觉的物流包装箱尺寸测量研究[J]. 包装工程, 2020, 41(19): 230236. [11] Chen C L Z, Wei J P, Peng C, et al. Improved saliency detection in RGBD images using twophase depth estimation and selective deep fusion[J]. IEEE Transactions on Image Processing, 2020, 29: 42964307. [12] Du Z C, Wu Z Y, Yang J G. Point cloud uncertainty analysis for laser radar measurement system based on error ellipsoid model[J]. Optics & Lasers in Engineering, 2016, 79: 7884. [13] 韓倩. 基于双目视觉的摄像头测距系统的设计与实现[D]. 石家庄: 河北科技大学, 2019. [14] 王玉伟, 尹颜朋. 基于RCF边缘检测和双目视觉的箱体体积测量算法[J]. 现代计算机: 专业版, 2017(35): 7174. [15] 毛琳琳. 基于双目立体视觉的大堆物料体积测量方法研究[D]. 杭州: 中国计量学院, 2015. [16] 刘星明, 刘晓利, 张平安, 等. 基于计算机视觉的三维重建技术研究[J]. 深圳信息职业技术学院学报, 2013, 11(3): 1319. [17] 吕联林. 物流包裹动态测量与分拣系统[D]. 福州: 福州大学, 2018. [18] Hsueh J T, Lin C Y. Constructing a network model to rank the optimal strategy for implementing the sorting process in reverse logistics: case study of photovoltaic industry[J]. Clean Technologies and Environmental Policy, 2015, 17(1): 155174. [19] Wang X H, Li S, Chen C L Z, et al. Datalevel recombination and lightweight fusion scheme for RGBD salient object detection[J]. IEEE Transactions on Image Processing, 2020, 30: 458471. [20] 李文. 计算机视觉中运动目标检测算法探究[J]. 数码世界, 2019(6): 5051.
