电液位置伺服系统的反馈线性化滑模控制研究
2021-07-20闵磊张洪信赵清海方磊杜善霄
闵磊 张洪信 赵清海 方磊 杜善霄
摘要: 针对电液位置伺服系统中存在的各种非线性因素和外界干扰不确定性等问题,提出了一种将反馈线性化理论与滑模变结构理论相结合的控制策略,建立了电液位置伺服系统的非线性数学模型,并采用反馈线性化理论对该系统中的非线性因素精确线性化,同时利用滑模变结构理论对系统中的外界干扰不确定性进行补偿。在Matlab/Simulink环境中,搭建某电液位置伺服控制系统模型,对提出的控制算法进行仿真验证。仿真结果表明,该控制算法相对传统比例积分微分(proportion integration differentiation,PID)控制算法位移跟踪误差缩小了9938%,相对滑模控制算法位移跟踪误差缩小了9877%,而且还消除了滑模控制的抖振问题,说明该控制算法有效改善了系统的位置跟踪品质,提高了系统的鲁棒性,并且削弱了系统抖振。该研究有效抑制了电液位置伺服控制系统的各种因素对位置跟踪精度的影响,提高了系统的控制精度。
关键词: 电液位置伺服系统; 反馈线性化理论; 滑模变结构理论; PID; 位移跟踪
中图分类号: TP271.31 文献标识码: A
电液位置伺服系统具有功率密度大、承载能力强和控制精度高等优点,因此被广泛应用于航空航天、船舶、汽车工业等领域[14]。但电液位置伺服系统本身存在着强非线性和外界干扰不确定性等因素,导致系统的控制性能降低[56]。随着工业化的发展,人们对于电液位置伺服系统控制性能的要求越来越高,许多专家学者都将非线性的控制方法引入其中,如反馈线性化、滑模控制、鲁棒控制、反演控制和神经网络控制等,在前面这些控制方法中,反馈线性化由于具有设计方法简单,控制精度高等优点而受到广泛重视[718]。反馈线性化方法就是将一个非线性系统线性化成一个线性系统,然后利用成熟的线性控制方法来达到更好的控制效果,近年来此法已被较多的研究与应用[19]。杨军宏等人[20]构建了由阀控非对称缸组成的非线性系统数学模型,利用反馈线性化理论将其线性化,并对系统的零动态稳定性进行了分析,但线性化后的系统没有进行控制算法设计;郭洪波等人[2124]分别运用非线性控制理论、滑模控制理论和最优控制理论,设计了阀控非对称缸(或者阀控对称缸)系统的控制策略,仿真结果证实考虑了系统的非线性因素,然后利用具有较强鲁棒性的控制算法能够提高系统的控制性能。因此,本文以阀控对称缸为主要研究对象,构建了电液位置伺服系统的非线性数学模型,针对该系统中的非线性因素采用反馈线性化理论将其精确线性化,然后利用鲁棒性较强的滑模变结构控制算法来提高系统控制精度,最后将这种反馈线性化滑模控制算法与传统PID控制算法和滑模控制算法分别进行对比,验证了该方法的有效性。说明该控制方法有效改善了系统的位置跟踪品质,提高了系统的鲁棒性,并且削弱了系统抖振。
1 电液位置伺服系统的非线性数学建模
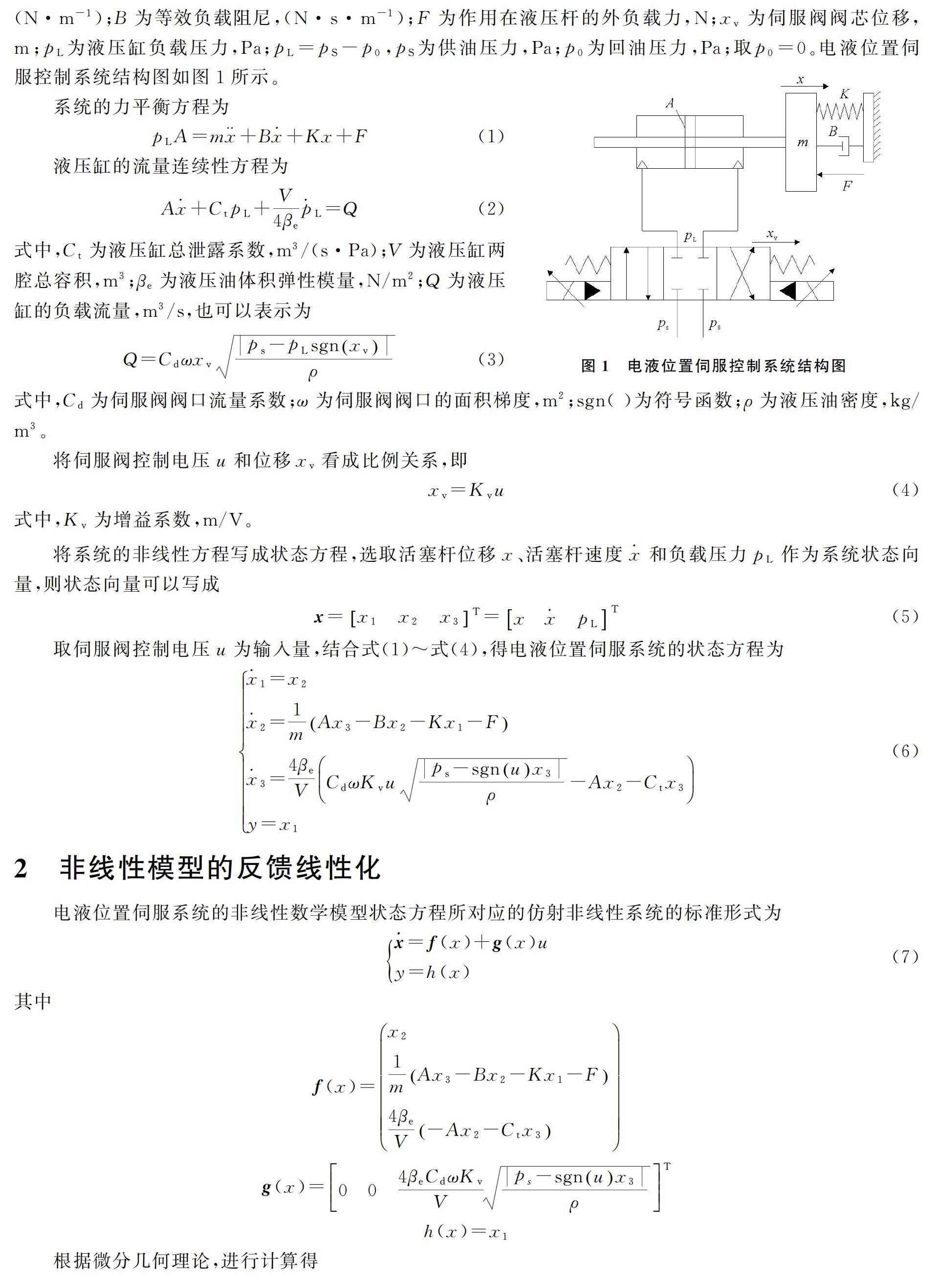
电液位置伺服系统采用阀控对称缸的液压执行机构,它是由零开口四边滑阀和对称液压缸组成。图中,A为液压缸活塞有效作用面积,m2;x为液压缸活塞杆位移,m;m为等效负载质量,kg;K为等效负载刚度,(N·m-1);B为等效负载阻尼,(N·s·m-1);F為作用在液压杆的外负载力,N;xv为伺服阀阀芯位移,m;pL为液压缸负载压力,Pa;pL=pS-p0,pS为供油压力,Pa;p0为回油压力,Pa;取p0=0。电液位置伺
5 结束语
本文建立了电液位置伺服控制系统模型,提出了一种反馈线性化滑模控制算法,并在Matlab/Simulink中进行仿真分析。仿真结果表明,该控制算法与传统PID控制算法相比,位移跟踪误差缩小了9938%,相对滑模控制算法位移跟踪误差缩小了9877%,而且还消除了滑模控制的抖振问题,说明该控制方法有效改善了系统的位置跟踪品质,提高了系统的鲁棒性,并且削弱了系统抖振,有效抑制了电液位置伺服控制系统各种因素对位置跟踪精度的影响,提高了系统的控制精度。该研究具有广阔的应用前景。
参考文献:
[1] He Z X, Feng Y B, Liu Y, et al. Semiphysical realtime control of electrohydraulic proportional position servo system based on Matlab/xPC[J]. The Journal of Engineering, 2019(13): 144149.
[2] Liu Z H, Deng S P, Jiang Y X. Research of electrohydraulic position servo system based on PID with disturbance observer[J]. Key Engineering Materials, 2016, 4283: 17521757.
[3] Marusak P M, Kuntanapreeda S. Constrained model predictive force control of an electrohydraulic actuator[J]. Control Engineering Practice, 2010, 19(1): 6273.
[4] 王军政, 赵江波, 汪首坤. 电液伺服技术的发展与展望[J]. 液压与气动, 2014(5): 112.
[5] 张振, 李海军, 曲晓燕, 等. 电液位置伺服系统鲁棒反馈线性化控制[J]. 机床与液压, 2016, 44(23): 148152.
[6] 韩俊伟. 电液伺服系统的发展与应用[J]. 机床与液压, 2012, 40(2): 1518.
[7] 李少年, 冀宏, 魏列江, 等. 一种阀控缸非线性特性研究[J]. 液压与气动, 2014(2): 5355, 60.
[8] 俞珏, 庄健, 于德弘. 采用李雅普诺夫函数的电液伺服系统反馈线性化控制[J]. 西安交通大学学报, 2014, 48(7): 7176, 123.
[9] 靳宝全, 熊诗波, 程珩. 电液位置伺服系统的变速趋近律滑模控制抖振抑制[J]. 机械工程学报, 2013, 49(10): 163169.
[10] 杨俊, 谭建平. 阀控非对称缸系统鲁棒反馈线性化控制[J]. 华中科技大学学报: 自然科学版, 2014, 42(2): 106110.
[11] Mili. V, itum , Essert M. Robust H ∞ position control synthesis of an electrohydraulic servo system[J]. ISA Transactions, 2010, 49(4): 535542.
[12] 方一鳴, 焦宗夏, 王文宾, 等. 轧机液压伺服位置系统的自适应反步滑模控制[J]. 电机与控制学报, 2011, 15(10): 95100.
[13] 刘广达, 臧万顺, 李翔, 等. 电液并行驱动双绳缠绕式深井提升系统钢丝绳张力反步控制策略研究[J]. 液压与气动, 2018(1): 5360.
[14] 方一鸣, 李叶红, 石胜利, 等. 液压伺服位置系统的神经网络backstepping控制[J]. 电机与控制学报, 2014, 18(6): 108115.
[15] Qi H T, Liu Z L, Lang Y. Symmetrical valve controlled asymmetrical cylinder based on wavelet neural network[J]. Engineering Computations, 2017, 34(7): 21542167.
[16] 郭庆. 电液伺服非线性控制技术研究进展综述[J]. 液压与气动, 2018(3): 19.
[17] 赵华, 唐文献, 李存军, 等. 基于反馈线性化的电液伺服系统线性二次型最优控制[J]. 机床与液压, 2016, 44(19): 5155.
[18] 但志宏, 张松, 钱秋朦, 等. 基于前馈反馈复合控制策略的高空舱高精度电液伺服控制技术[J]. 燃气涡轮试验与研究, 2019, 32(6): 15, 19.
[19] 王鑫刚, 芮光超, 丁兴亚, 等. 基于干扰观测器的电液伺服系统反馈线性化滑模控制[J]. 液压与气动, 2018(6): 813.
[20] 杨军宏, 尹自强, 李圣怡. 阀控非对称缸的非线性建模及其反馈线性化[J]. 机械工程学报, 2006, 42(5): 203207.
[21] 郭洪波, 李洪人. 基于Backstepping的阀控非对称缸电液伺服系统非线性控制[J]. 液压与气动, 2004(10): 3840.
[22] 靳宝全. 电液位置伺服控制系统的模糊滑模控制方法研究[D]. 太原: 太原理工大学, 2010.
[23] 刘川来, 周培培, 张东栋. 非线性反馈线性化最优控制在电液伺服系统中的应用[J]. 甘肃科学学报, 2014, 26(3): 6568.
[24] Fan Y Q, Shao J P, Sun G T. Optimized PID controller based on beetle antennae search algorithm for electrohydraulic position servo control system[J]. Sensors, 2019, 19(12): 27272748.
