基于云平台的校园无人巡逻机器人远程智能控制系统设计
2021-07-20王国杰
王国杰 薛 磊 赵 凯
(邯郸职业技术学院 计算机系,河北 邯郸 056005)
引言
无人巡逻机器人是一款可用于校园、工业园区、社区等公共场所的智能化巡检设备。其具先进的自主导航、图像识别算法、精确定位、地图建模等技术,可在自主巡逻过程中实现对周边的人、事、物的识别、侦测和分析,是目前高效率、高智能化的“机器人+安防”巡逻手段之一。其具备多种功能如:远程通信、人机交互、巡检录像、AI智能分析、无人值守等,在校园里可以替代安保人员执行园区内的巡逻任务,具有部署简单、操作方便的优点,可实现实时监控记录,并配有云平台数据管理系统可实现现场第一手视频与统计资料的保存,以便对不文明的行为和事件进行回溯和追查。在一些污染、有害气体浓度大等危险区域以及恶劣环境下,无人巡逻机器人都可有效地提高作业的安全性、可靠性。
本项目以嵌入式智能工控板开发技术为基础,应用有线局域网、双4G无线通信、传感器及云平台软件系统等信息技术,开发了校园无人巡逻机器人远程智能控制系统。该系统根据实际情况的需求设计,软、硬件设计结构简单、功能安全可靠,基本实现了机器人自检、环境监测预警、视频传输、行为拍照、双向语音对讲、智能避障、后台远程管理等功能,为校园及社区等无人巡逻机器人远程智能控制系统提供一种低成本解决方案。
1 系统架构设计
无人巡逻机器人远程智能控制系统主要实现校园内的环境监测预警、视频传输、行为拍照、双向语音对讲等功能,系统结构包括传感器感知层、网络传输层和应用管理控制层,其架构如图1所示。
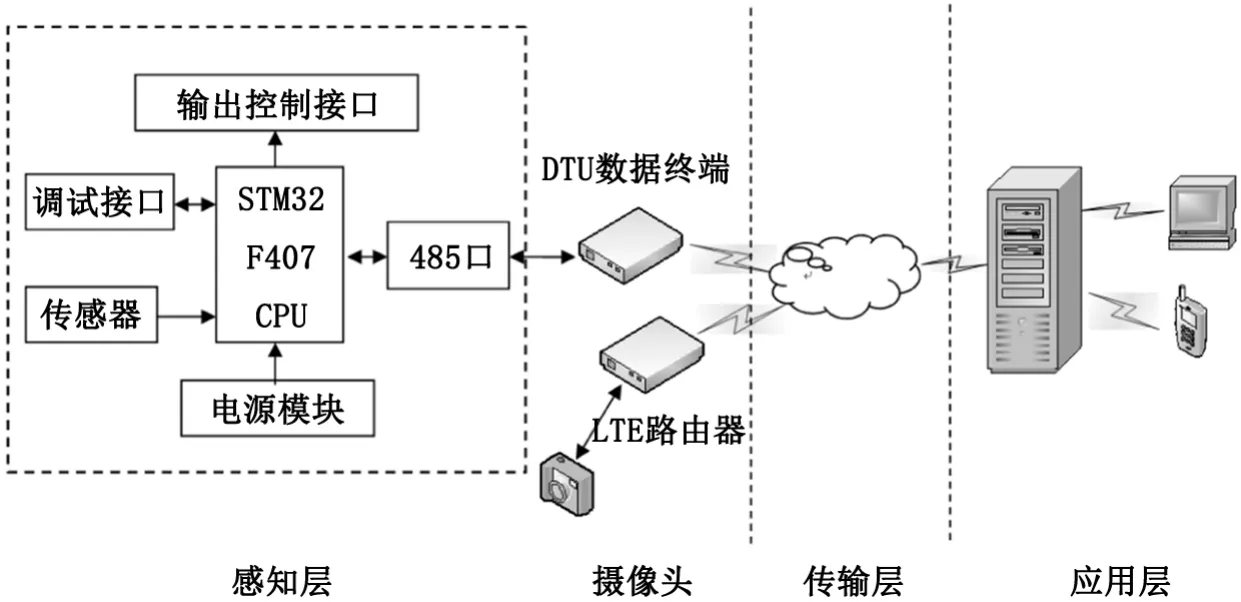
图1 系统架构图
感知层主要包含传感器信号电路、输入接口、调试接口及4G通信模块等,实现避障传感和超声波测距信号的采集及滤波等功能。网络传输层包括DTU数终端及LTE路由器,主要实现与云平台数据传输功能。云平台管理系统包括PC端和移动端监控软件,用于实现数据处理、分析及控制等功能,其中执行系统包括步进驱动器和步进电机等。
首先,由监控摄像头采集的视、音频数据通过LTE路由器4G网络传送到云数据平台,同时防碰撞传感器等采集的传感数据通过DTU数传终端4G网络传送到云平台;其次,云平台管理系统对传输的数据进行处理和分析;最后,由PC端和移动端监控软件实现巡逻机器人的控制和语音对讲等功能。
2 系统硬件设计
系统硬件包括视、音频监控和嵌入式智能工控板两部分,视、音频监控主要负责环境监测、视频传输、拍照和双向语音对讲等功能;智能工控板主要完成机器人自检、智能避障、环境数据采集传输、执行系统输出控制等功能。
2.1 视音频监控硬件
视音频监控由摄像头和低成本4G工业路由器USR-G805组成,其结构如图1所示。摄像头采用海康威视的萤石C3X,具有WiFi、全彩智能夜视;AI智能的深度学习能力可实现人形、车形自动检测,并能有效地过滤掉输赢晃动、光线变化以及小动物移动等引起的无效报警,大大减少了误报;自定义告警区域即当自定义的区域范围内出现人形或车形移动时,将实时上传告警信息到PC端或手机端;双向语音对讲并可在本地实时存储视音频等功能。USR-G805 是低成本4G工业无线路由,支持LAN口和WLAN无线局域网,可设置动、静态路由,DHCP或静态 IP 模式,支持5模12频网络制式及防火墙、端口过滤、端口映射功能;可进行VPN加密传输,内有硬件看门狗电路,确保系统可靠稳定。
2.2 嵌入式智能工控板
嵌入式智能工控板采用低功耗设计,以STM32F407 嵌入式单片机为核心,由电源模块、防碰撞传感器、I/O接口电路、DTU数传终端、输出控制接口及步进驱动器等模块组成,其结构如图2所示。
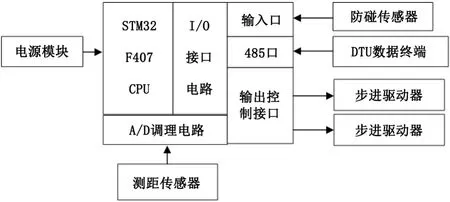
图2 智能工控板结构图
2.2.1 CPU主控模块
根据系统设计需求、考虑系统功耗及性价比等因素,设计采用STM32F407核心处理器作为主控芯片,其核心为高性能的32位Cortex-M4处理器,频率最高可达168MHz,支持定、浮点运算以及DSP指令集。支持SWD和JTAG两种方式的系统调、测试。
2.2.2 电源模块
由于巡逻机器人采用可充电的48V锂电池组供电,红外避障传感器E18-D80NK电源输入电压为6-36V,M30超声波测距传感器输入电压为10-30V,而主控芯片输入电压为3.3V。依据设计需求,首先选用一组外置电源DC-DC48V转24V5A直流降压模块为传感器供电,其次工控板电源模块选用24V转3.3V LM2675M,其为开关型直流降压模块,转换效率高达88%,电路设计简单,可为主控芯片提供超低噪声的静态电流,电源模块原理如图3所示。
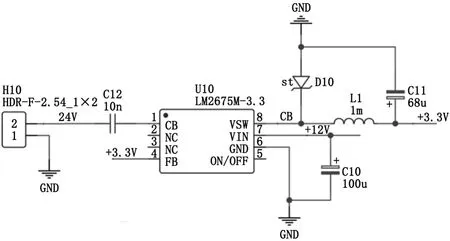
图3 电源模块原理
2.2.3 传感器模块
避障传感器采用红外漫反射光电开关E18-D80NK,直流三线NPN常开传感器,供电电压6-36V,感应距离为80cm;在没有感应到物体时,输出电压为24V,感应到物体时输出0V。测距传感器采用高精度M30超声波测距传感器,其线性位移模拟量0-10V,感应范围20-400cm,响应延迟约为650ms,这两种传感器响应速度快,抗干扰能力强,性价比高,满足设计需求,其原理接线图如图4所示。

图4 传感器原理接线图
2.2.4 485接口电路
RS485是目前工控领域典型的串行通讯标准之一,采用差分的数字信号传输方式,半双工通信模式,最大传输距离可达1200m左右,具有良好的抗噪声信号的能力,高效的数据传输速率、数据传输的可靠性非常高以及一个主站可以挂接多个从站能力使其成为在工控领域中首选的串行接口。本文采用MAX485芯片,其内接口信号电平为3.3V,可十分方便地与主控芯片电路相连接,外接口与DTU数据终端相连,485原理接线如图5所示。
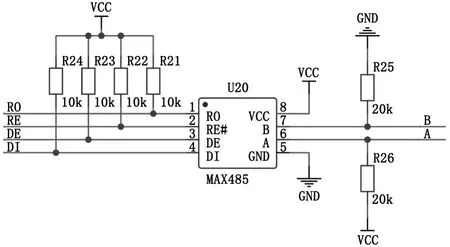
图5 485原理接线图
2.2.5 DTU数据终端
DTU数据终端主要用于智能工控板数据的上传和云平台监控系统的控制指令的下载,型号为USR-G780,具有一个标准的485接口,支持全网4G高速接入,支持网络透传模式、云组态模式、协议透传(UDC)模式、HTTPD 模式等多种工作模式;提供相应的虚拟串口软件和二次开发 SDK工具包;支持发送注册包/心跳包数据,维持长时间网络低功耗连通状态;DTU数据终端与智能工控板通过485接口相连,连接原理如图2。
3 系统软件设计
系统软件包括嵌入式智能工控板的传感器数据采集与步进驱动器输出控制程序、ModbusTCP协议通讯程序、云数据平台监控程序等。Modbus协议是工控行业的一个标准的应用层报文传输协议,目前在全球已经成为工业领域中最流行的协议之一。该协议支持RS-232、RS-422、RS-485 和TCP以太网等接口设备。其主要包括ASCII、RTU、TCP等三种报文类型,数据通讯采用Maser(主)/Slave(从)方式。为保证数据传输的可靠性,ASCII类型采用LRC校验,RTU类型采用16位CRC校验,由于TCP协议本身就是一个面向连接的可靠的传输协议,因此TCP类型不需要进行校验。
3.1 智能工控板程序
传感器采集程序主要用于实时采集避障传感器数字量信号及测距传感器的模拟量信号,程序采用轮询的方式对传感器数据进行采集、处理和发送。通过采用串口中断方式接收来自云平台监控系统的控制指令来操作巡逻机器人的移动。传感器数据采集、处理、发送及串口中断子程序流程如图6所示。
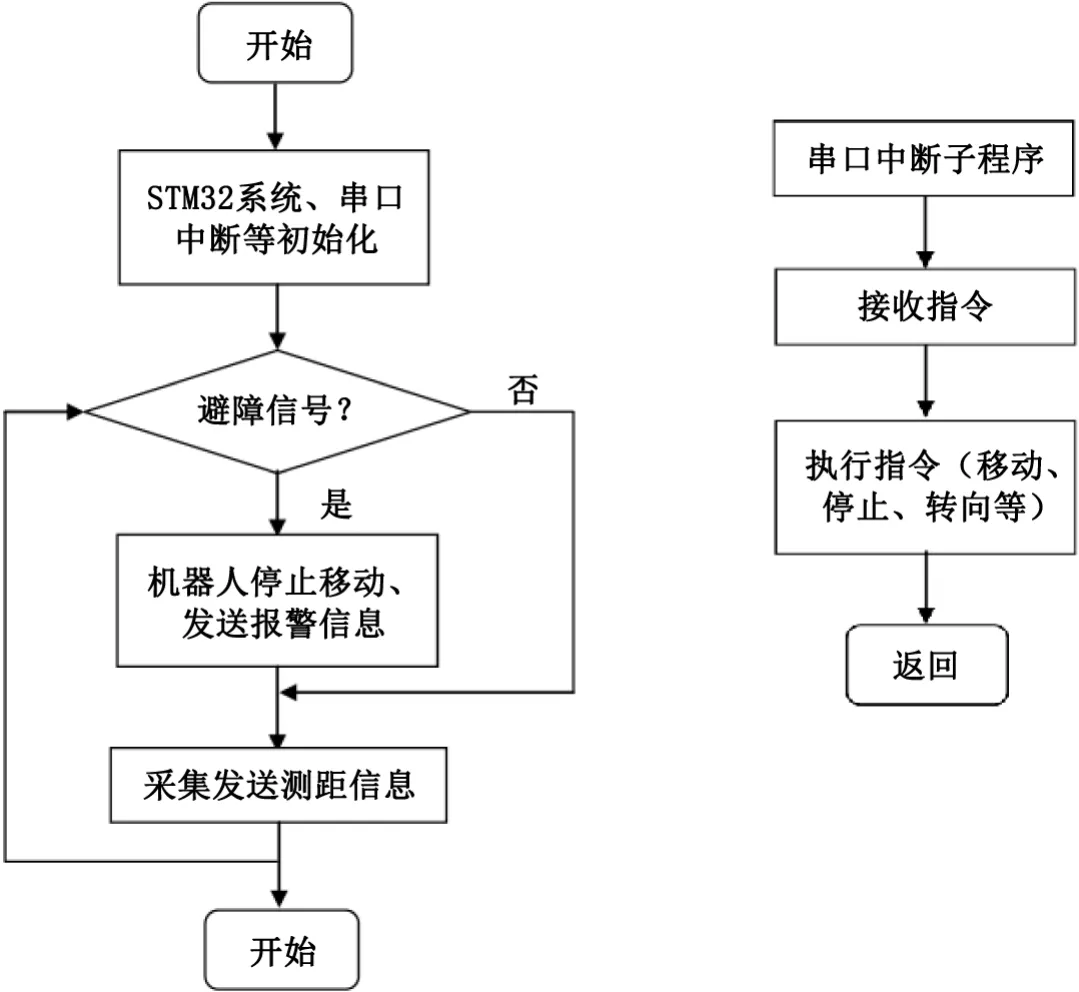
图6 主程序和串口中断子程序流程图
3.2 ModbusTCP协议格式
ModbusTCP的数据帧由两部分组成:MBAP+PDU。MBAP为应用数据报文头,长度为7个字节,分为事务处理标志、协议标识符、长度和单元标识符四部分。PDU分为功能码和数据两部分。功能码长度1个字节,数据长度则由具体功能决定,其操作对象有四种:线圈、离散输入、输入寄存器、保持寄存器。ModbusTCP使用端口号为502,ModbusTCP设备可分为主站和从站,由主站向从站发送请求帧,相应的从站给予响应。ModbusTCP是目前工业智能控制领域中应用最为广泛的协议之一,具有很高的应用价值,本案采用ModbusTCP作为传输协议。
3.3 云平台监控系统
云数据平台可分为公有云、私有云及混合云等,本系统采用公有云数据平台,这主要考虑到租用成本,以及系统的安全性、可靠性及方便性。
云平台监控系统开发首先要在公有云平台中创建该项目的账号,创建设备模型并与数据终端和路由器进行绑定,并开通物联网应用服务;其次通过虚拟接口建立与设备连接;最后在公有云数据平台创建web应用,在服务器端进行云组态的程序开发。
本系统通过云组态程序开发实现传感器视音频监控、测距数据的采集、避障警告、巡逻机器人的移动等功能。在监控界面中,可使用按键来控制巡逻机器人的前行、左拐和右拐等移动,也可采用操作杆实现其移动功能。通过视频画面可以监控巡逻机器人的位置和方向。本系统提供了良好人机交互界面,开发成本低廉、简单方便、安全可靠,功能上可以有效地满足项目的需求。
结论
本项目利用嵌入式智能工控板、双4G网络和云数据平台监控系统实现了无人巡逻机器人的远程智能控制。系统以STM32F407嵌入式芯片作为智能控制板的核心,通过双4G高速网络将视音频信号和传感器数据传输到云平台服务器,并利用云组态软件开发的监控系统对机器人的移动、定位、方向等进行全方位监控。
巡逻机器人智能控制系统进行了大量应用测试,结果表明系统运行稳定可靠,系统可有效地满足校园无人巡逻的基本需求,初步达到了设计的要求。并且该系统具有良好的可扩展性,可根据实际需求扩展相应的功能。其可以全天无休的工作,适用于各类公共场所的安防巡逻任务,可协助完成校园巡逻巡检等任务,是安保的重要补充。
