Trimble RTX技术在远海风电项目中的应用
2021-07-20田欣
田 欣
(天津港航工程有限公司,天津300457)
我国拥有长达1.8万千米的海岸线及数百万平方千米的可利用海域,丰富的海洋风能资源为我国大力开发海洋风能风电场奠定了良好基础。滩涂、潮间带以及深远海海域也拥有丰富的可开发风能资源,2017年以来海上风电产业的迅速崛起。2020年,随着海上风能的不断开发,滩涂、潮间带以及近海海域风电场逐渐饱和,风电场的建设正逐步向深海及离岸更远的远海发展[1]。
远海风电建设带来的严峻挑战之一就是定位困难。目前较为成熟的定位技术有:RTK(Real-time kinematic实时相位差分技术)、VRS(Virtual reference station虚拟参考站技术)、DGNSS(差分全球导航定位系统)、SBAS(Satellite-Based Augmentation System星基增强系统)[2]。各定位技术精度与特性见表1。

表1 主流定位技术参数表
在以往近海风电建设中的定位技术主要为RTK,GPS的差分信号主要采用无线电发射和接收,具有低延迟、精度高的特点[3]。2018年以来,风电场的建设逐步向远海发展,以我公司承揽的华能江苏大丰海上风电项目风机基础施工及风机安装施工工程为例(下文简称华能大丰海上风电项目),项目位于大丰区海域的毛竹沙,离岸距离55km,周边无岛屿和已成型的构筑物,无法架设基准站。项目沉桩施工部分定位精度限差为平面50cm、高程5cm,对照各定位技术指标,理论上RTX技术才能满足要求。
由于RTX技术在远海风电项目中应用的文献资料较少,因此本文结合成功应用RTX技术的风电项目,对RTX技术的性能参数进行分析,并对其在远海风电中的应用效果进行验证。
1 RTX技术介绍
1.1 RTX技术系统组成
Trimble RTX(天宝Real-Time eXtended实时差分扩展)技术是美国Trimble公司研发的一种星站差分定位技术,2011年开始在美国与欧洲大规模商用,2014年进入国内市场。RTX服务提供范围如图1。

图1 RTX服务覆盖范围
1.2 RTX技术原理
RTX系统主要由GNSS卫星系统、L波段通讯卫星、Trimble RTX控制中心和遍布全球的GNSS跟踪站网络组成。其工作原理如图2所示:首先分布于全球的约100个GNSS跟踪站,连续获得实时卫星和大气改正数据后汇总至Trimble RTX控制中心,控制中心通过准确的模型和算法生成RTX差分数据,然后将差分数据以CMRx格式打包注入L波段通信卫星或蜂窝数据网络后,通过无线广播到RTX终端设备,从而大大提高RTX终端设备定位精度[4]。

图2 RTX系统原理
2 项目实例
华能大丰海上风电项目位于江苏省大丰区海域的毛竹沙,离岸距离55km,周边无岛屿和已成型的构筑物。项目沉桩施工部分定位精度限差为平面50cm,基础形式为7m直径单钢管桩,基础数量23。下面内容将依托此项目简要阐述RTX技术在远海风电项目应用的过程与效果。
2.1 RTX设备介绍与施工定位准备
本项目所用RTX设备终端为:Trimble SPS986。
本项目施工控制点与坐标转换参数为:建设单位提供6个控制点,与施工区域WGS-84至CGCS2000的坐标转换7参数。
施工定位前的准备工作主要是利用RTX定位技术复测控制点:首先在Trimble SPS986控制器TSC3上新建项目,配置RTX功能参数(设置源椭球与目标椭球,输入中央子午线,设置坐标系统,录入7参数)[5]。之后在Y1控制点上架设接收机,对控制网进行点校正,再依次复测控制点Y2-Y6,每个点测量30个历元,复测3次,取平均值作为复测成果。
2.2 RTX控制测量数据统计和精度分析
复测数据分析:通过与已知坐标对比,平面最大偏差为Y6(35mm),高程最大偏差为Y5(-37mm)。均小于50mm,精度达到《全球定位系统实时动态测量(RTK)技术规范》一级控制网的要求见表2。
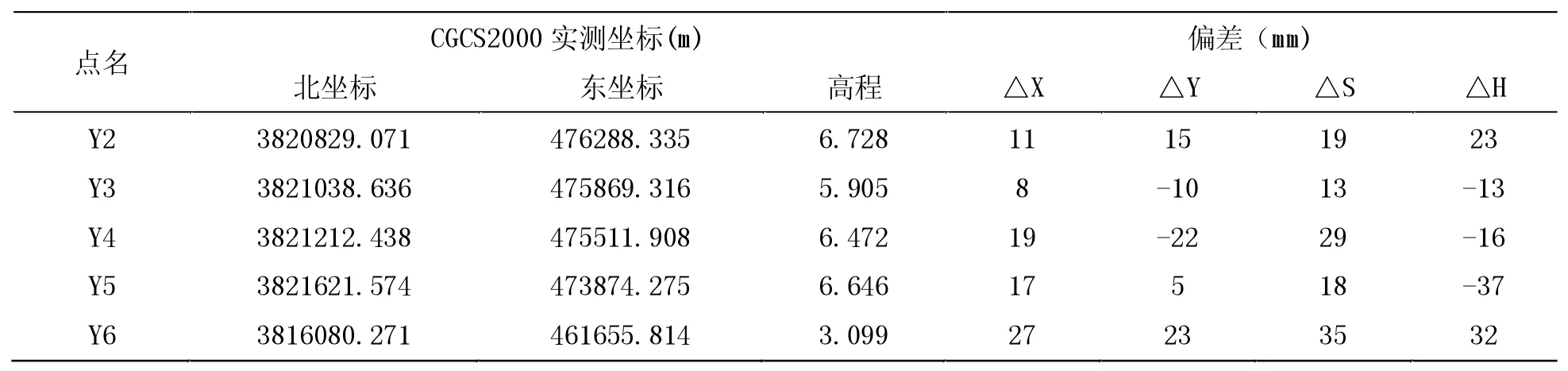
表2 实测控制点坐标及误差表
2.3 RTX技术在远海风电沉桩过程的应用
RTX定位在项目中应用的实际过程:桩平面位置定位主要通过稳桩平台精确定位实现。利用船舶GPS进行初步定位,船舶锚点收紧后利用RTX设备实时观测稳桩平台位置,通过调整锚缆实现精确定位。
施工前,先复核稳桩平台的抱桩直径、上下层液压千斤顶位置和层高。理清桩设计中心与稳桩平台位置控制点关系,见图3。通过RTX测量稳桩平台位置控制点的平面位置反算桩中心坐标,实现桩平面定位。因为实际桩中心位于两个特征控制点连线的中点位置,假设特征控制点1的坐标为(x1,y1),特征控制点2的坐标为(x2,y2),则桩中心坐标为((x1+x2)/2,(y1+y2)/2)。
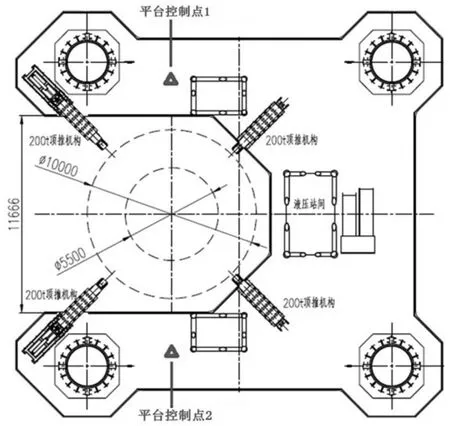
图3 稳桩平台平面位置控制点分布图
施工过程中,先利用船舶GPS进行初步粗定位,并完成抛锚。之后测量技术人员利用RTX设备反复测量抱桩器两个特征控制点坐标,通过差量指挥调节锚缆移动,实现稳桩平台精确定位。因桩位实际坐标向设计坐标接近的过程是通过调节船舶甲板上的六台锚机伸缩完成的,锚机操作员通过测量员给出的实际误差,不断调节锚缆伸缩,使得实测坐标向设计坐标逐步靠近。虽然RTX的定位精度优于35mm,考虑到定位效率与定位精度的平衡,当实际桩位误差在200mm内(本项目桩位设计精度优于500mm)时即锁紧全部锚机停止调整。
精确定位后,另一名测量员进行复测,确保精度满足设计要求,并测量特征点坐标,填写放样复测记录表。
2.4 RTX技术定位数据统计与精度分析
经过该项目23根单桩定位的应用,最大北坐标误差156mm,最大东坐标误差194mm,最大坐标向量误差223mm。北坐标中误差优于72mm,东坐标中误差优于79mm,坐标向量中误差优于140mm(见表3、表4)。以上指标均满足远海单桩基础平面定位精度500mm的限差要求。
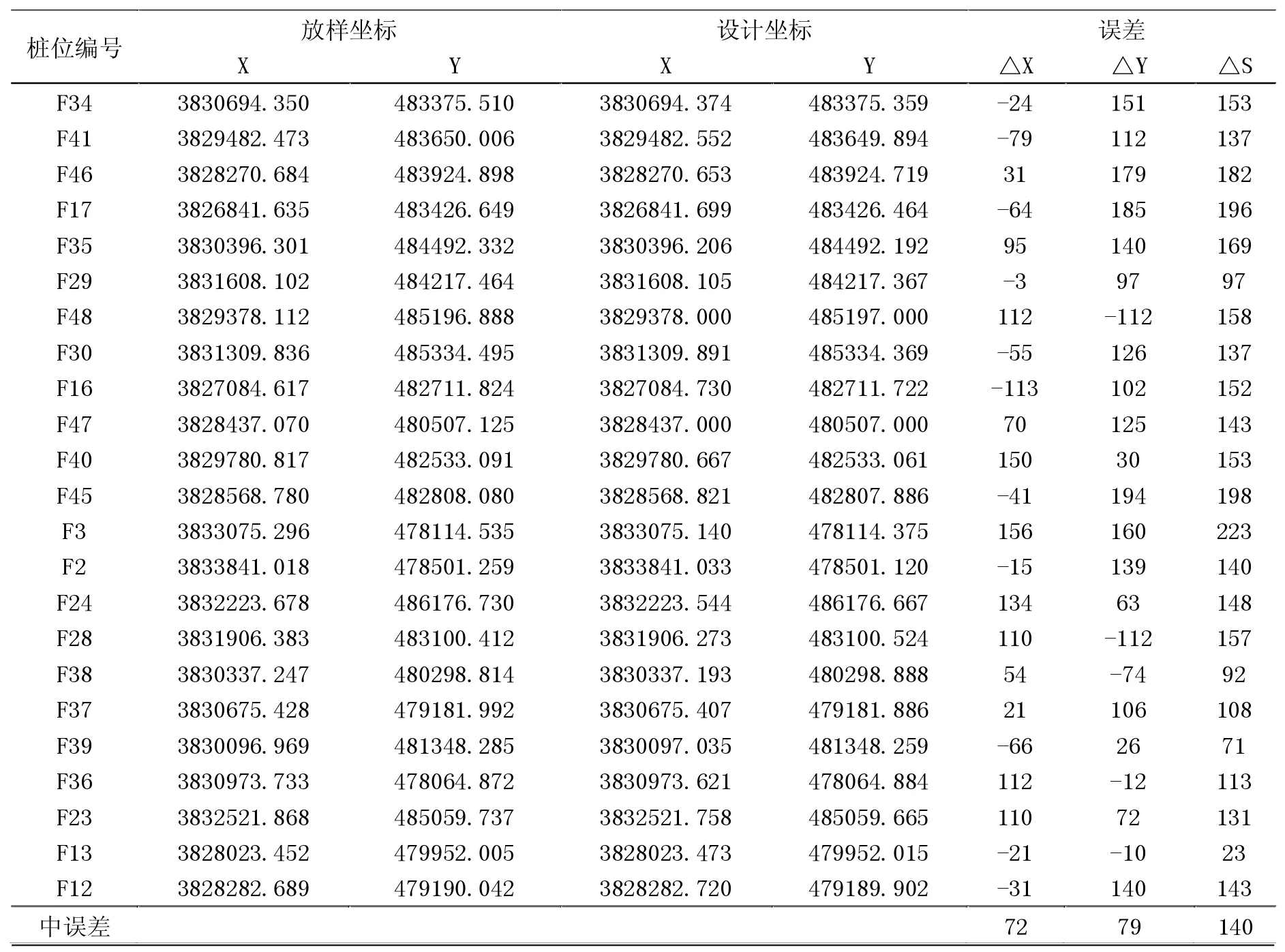
表3 桩位放样坐标与误差记录表

表4 桩位放样精度分析表
3 结束语
经过项目的实际应用,RTX技术定位精度高、定位速度快、部署维护简易[6],完全满足远海沉桩定位的要求。同时也证明了Trimble RTX技术在远海风电项目中替代传统定位技术的高度可行性。也为后续将RTX系统引入船载打桩定位系统,以适应更复杂的风电基础(如高桩承台基础、导管架基础等)提供了有效的理论支撑。
2020年10月,400多家企业联合发布了《风能北京宣言》,提出践行国家碳减排目标的风电发展路线图:十四五期间风电必须每年新增装机容量不低于5000万千瓦。这一路线给予了海上风电市场广阔的发展空间,也给予了RTX这种广域差分技术在无基准站及CORS系统的区域,特别是远海风电基础定位领域大面积推广应用的前景,并广泛提高项目作业效率与降低时间成本。
