基于ATmega32A单片机的竞步体操机器人的研究与设计
2021-07-20邹乐瑶陈思颖王少坤
邹乐瑶,陈思颖,王少坤
(西北农林科技大学 水利与建筑工程学院,陕西 咸阳712100)
本篇文章的研究成果被用于2020年中国机器人大赛暨RoboCup公开赛的“工程竞技类机器人-类人形机器人竞技全能赛”,规则除了要求体操机器人应具有人的形状特征且能够短时流畅地完成常规体操动作如双手俯卧撑、单手俯卧撑、前后滚翻、倒立、侧手翻和自选动作外,还要求体操机器人具有直立行走的能力,这是此次比赛规则的创新点和难点所在。常规体操机器人具有可独立运行的双臂和双腿,其中手臂部分不少于3个自由度,双腿部分不少于2个自由度。由于规则的改变,体操机器人的类人形结构设计、机械结构设计、自由度个数的选择和分配等问题的解决方法都与往常体操机器人有很大的区别。本课题立足于常规体操机器人的创新发展,较为成功地解决了设计中出现的很多新型问题,并在比赛中加以运用最终获得了优异的成绩。
1 机器人控制系统的设计
机器人的控制系统是整个设计流程中尤为重要的环节,它将会直接影响机器人是否能够完成相应的功能。由于大赛规则要求,机器人必须采取自主式脱线的方式完成比赛,中途不可人为触碰,所以决定采取单片机控制的方式。通过对体操机器人要求展示动作的分析、机器人人形结构的设计、身体自由度数目的选择、各关节自由度的分配等问题的讨论,确定机器人的框架和身体各处参数设置。完整的控制流程见图1。
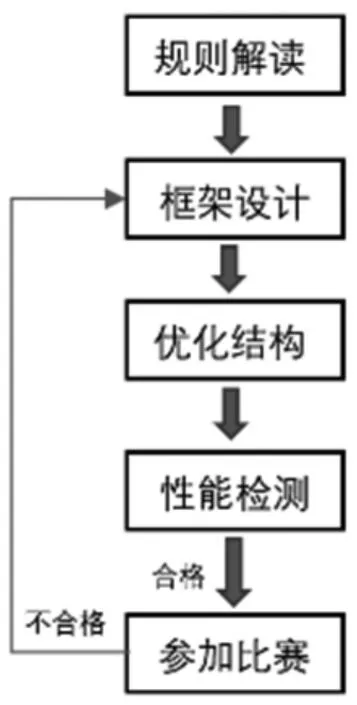
图1 控制流程
2 机器人控制电路的设计
机器人采用自制的Yobot15路舵机控制板作为主要的硬件控制电路。Yobot15路舵机控制板是由西北农林科技大学学生自主设计与制作的电路板,具有许多非常优秀的性能。而它所配对使用的YoSevro软件也是一款简单易操作的上机控制软件。通过Yobot控制板可以实时的实现对14个舵机的控制,调试行走及体操动作。图2、图3为电路板PCB的布线图。
图2 正面布线图

图3 反面布线图
体操机器人使用RDS3115舵机作为驱动轮动力源。与同类型的舵机相比虽反应灵敏度、准确度、扭矩大小相对较弱,但其性价比最高。RDS3115舵机产品图如图4。
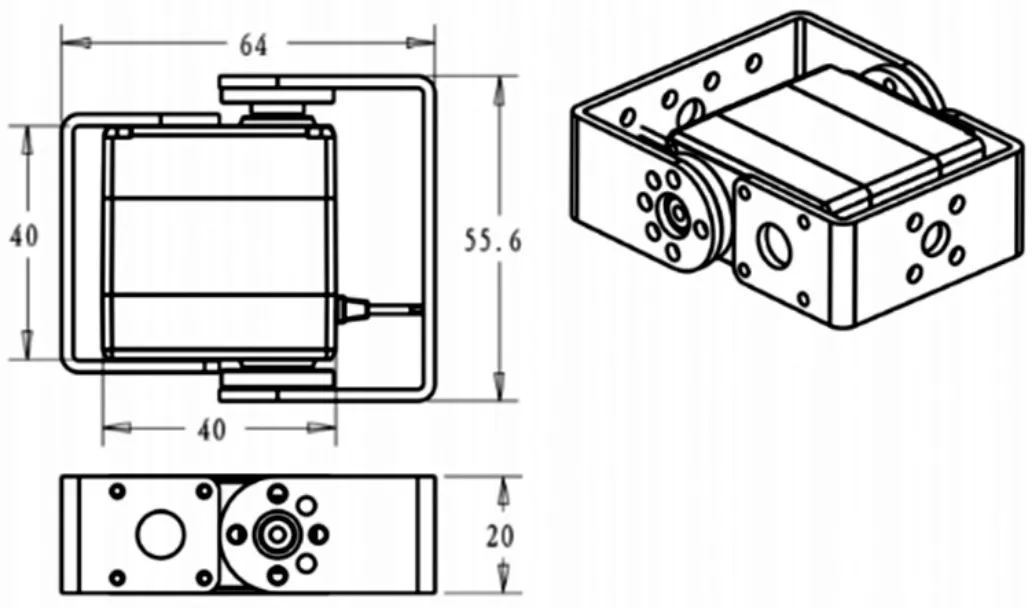
图4 RDS3115舵机产品图
RDS3115舵机的综合参数如下:
(1)使用环境
存储温度:-30℃~80℃;
运行温度:-15℃~70℃;
工作电压范围:4.8-6.8V。
(2)机械特性
尺寸:40*20*40mm;
重量:60g。
(3)电气特性
驱动方式:PWM(Pulse width modification);
脉宽范围:500至2500μsec;
控制角度:180°或者270°;
控制频率:50-330Hz。
采用PWM调制方式的显著优点是抗干扰能力强、精度高。调制详情见图5。
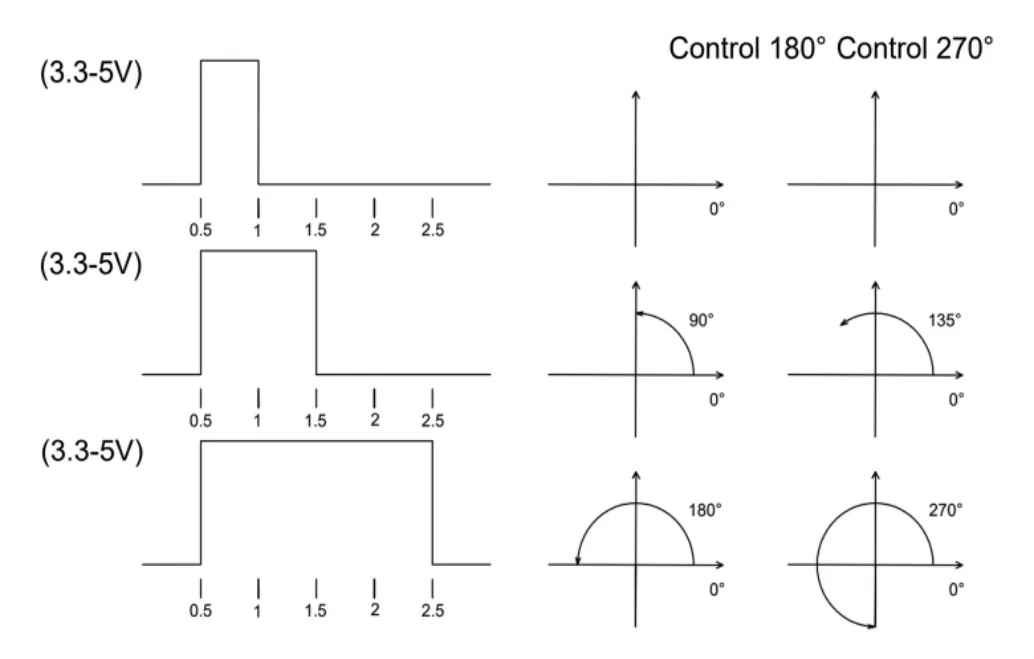
图5 PWM调制过程
硬件电路部分由2S Li电池提供7.4v电压给舵机控制板Yobot供电。
3 机器人机械结构的设计
以往比赛中对体操机器人的竞赛要求是能够在有限时间内独立完成规定的体操动作和自编自选动作,由于2020年比赛规则的变更,机器人要求加入“从比赛场地入口直立行走至场地中心”这一新动作,这使得机器人的身体结构、机械结构设计以及体操动作设计都将发生较大改动。经过多次机械结构的尝试和优化,最终确定了机器人的整体结构如图6所示。
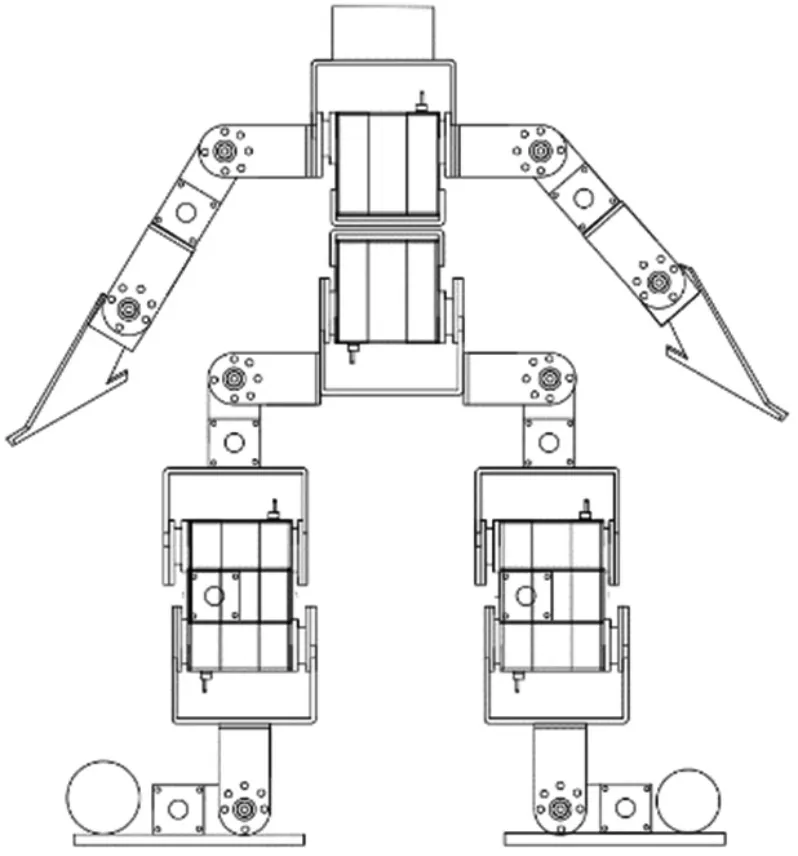
图6 机器人整体结构图
在此次结构设计中主要有两个创新点。首先,由于机器人要求直立行走,腿部较以往增加一个自由度以实现向前胯步,增加一个自由度意味着腿部的长度将多出一个舵机的高度,会导致机器人重心过高行走站立不稳,展示动作时腿部过长导致动作的协调度、美观度较差,甚至有些难度较高的动作难以实现。所以最终我们选择将腿部上下经铝件相连的两个舵机进行空间错位连接,采用高粘性的胶水进行初次连接,之后为保证其牢固性和稳定性,又利用打孔机进行穿孔加以铝件连接固定。如图7所示。

图7 腿部舵机详图
其次,我们在不断性能检测中对机器人手掌也做了相应的调整。常规体操机器人手板通常选取与脚板相同大小、材质的正方形或长方形塑料硬板从而提高机器人的对称性和美观度。但在动作调试中发现,方形的手掌难以支撑机器人卧地之后的站立动作,使机器人经常出现动作中断甚至舵机堵转发热损坏的情况。所以经过反复的更改和尝试,最终确定机器人手部的形状为“T”字形,如图8所示。用高强度的胶水和胶布将手掌固定在机器人手臂的合适位置。经多次调试发现,“T”字形手掌能够极大地提高机器人动作的完成度和体操动作的简洁性。
图8 机器人手板图
4 结束语
针对机器人的竞速和体操两个主要要求,文章对传统的体操机器人加以创新和改造。通过长时间的反复调试运行,其稳定性、灵敏性、完成度都较好地满足了中国机器人大赛的比赛要求,这对于类人形体操机器人的研究提供部分思路。
