车载武器系统伺服控制研究
2021-07-20范留彬
范留彬
(中国空空导弹研究院,河南 洛阳471000)
伺服系统(Servo-System)指的是一类随动类型的控制系统,是自动控制领域中的一类重要系统。此系统主要的功能是控制相关机构(被控对象)的转动角度或相关位移量,让被控对象可以自主并且精确地重复系统输入相关指令所表达的运动变化规律。伺服系统的发展演变过程主要表现为从液压系统升级到电气系统的历程。电气类型的伺服系统按照相关驱动电机的种类可以划分为直流(DC)类型的伺服系统及交流(AC)类型的伺服系统两大类。伺服系统相关的自动控制科技属于自动化学科类通用实际产业领域关联性最强、延伸范围最广的一类学科。特别是在军事领域中,对于相应的伺服系统提出了高速度、高灵敏度、高稳定性及高度的抗干扰性能以及较强的鲁棒性等要求,比如雷达系统中天线装置的自动跟踪控制系统、远程战略性导弹发射装置的瞄准过程动态控制以及鱼雷装备中的自动目标追踪控制系统等等[1]。
1 国内及国际上的伺服控制系统的发展情况简述
现代化的伺服控制系统,已经完成了从模拟时代到数字时代的跨越,数字化的控制环路已经取得了非常广泛的应用,例如相位的转换、电流数值、各个分量的速度及位置数值控制;使用新款的功率放大半导体单元、高性能DSP及FPGA、及伺服系统的专用单元。国际上知名厂商出品的伺服控制相关技术相隔6年左右就将进行一次更新换代,新款的功率放大元件或者模块相隔3~4年就将升级一次,新版本的软件及算法的更替则更为频繁,总而言之,该领域的产品生命周期已经变得愈发短暂。综合国内、国际各个伺服系统厂商的相关技术及产品的未来发展趋势,不难看出在不久的将来,伺服控制系统的主流发展方向通常表现为:高效率特性、直驱模式、高控制精度、高速度、高执行性能、集成化与一体化趋势、通用性能好、智慧化、信息化及模块应用等[2]。现阶段国外许多知名伺服系统控制领域的巨头经过并购与结盟的操作,高速扩张其所在的业务领域,主要是想实现一站式、全方位解决方案供应商的霸主地位,例如从1997年来,已经有超过45家伺服系统控制公司被行业巨头接连收购,其中包括大家比较熟悉的某些历史比较悠久的品牌厂商。
2 伺服系统控制设备的整体框架方案设计简介
2.1 重要功能参数指标
(1)依据相应需求,指定相关发射框架的转动区间为:平面范围土115°;上下仰角为(0~+55)°。
(2)发射框架的调动响应时间要求≤6.5s,调转动作的最大位移速度为16°/s,加速度16°/s2。
(3)依据笛卡尔坐标系的相关精度需求,在5.5°角偏差量阶跃类型的输入信号状态下,要求伺服系统的控制装置稳态误差数值处于<17°的状态(包括传动系统的误差)。
(4)依照系统的动态精度需要,在运动系统的回转速度数量不大于33mrad/s的情况下,伺服系统控制装置的总体速度误差数值处于<17°的状态(包括传动系统的误差)。
(5)在满负荷的情况之下,发射框架在平面范围及上下仰角层面的回转速率数值为(0.15~19)°/s状态下可以实现回转动作的平稳执行。
(6)在满负荷的情况之下,系统的动态响应特征数值的相关需要,针对5.5°角度数值偏差信号的阶跃输入信号数值,如果实现稳态数值的97%,其总体调整时间为≤1.8s的区间,系统的总体超调量为≤15%的区间。
(7)伺服系统的控制装置必须符合驱动装置的满载需求,其总体的转动惯量为俯仰通路2650kg·m2,平面范围通路2450kg·m2;负载的力矩数值满足俯仰通路16550N·m,平面范围通路2650N·m。
2.2 伺服系统控制相关装置的总体设计方案简述
针对车载武器系统相应的伺服控制系统,通常应用脉冲频率宽度调制功率的放大装置来驱动电机进行动力方面的活动。主要原因是:车载武器系统的驱动负载通常归类到中小功率数值的范围,车载武器系统的电源是蓄电池及车载发电机装置,该电机的输出力矩、转动惯量比值大大超过传统液压类型的伺服系统机构,与此同时在噪音控制、环境污染、野外适应性等层面具有显著的优势。采用脉冲宽度调制(PMW)类型功率放大装置,通常是因为脉冲宽度调制类型的功率放大装置处在开、关情况,功率的损耗数值较低,执行效率较高,带宽的线性相关程度较好,该情况比较适合于电池系统进行供电操作[3]。
相关伺服系统应用直流型电动机进行各类动作的操控,为了实现降低母线电流的目的,综合功率放大装置的相关性能,采用85V的电源提供电能,就必须更换电源,由电磁兼容的层面考虑,电源装置需要进行隔离。位置变化的传感装置具有许多种类可供选择,一般可以选用旋转型变压器、自动调整角度装置、传动轴角度编码装置等等,针对车载武器系统来讲,振动和冲击等外部环境比较恶劣,曾经使用较多的是旋转型变压器装置;伴随着光电传动轴角度编码装置相关技术的持续发展、稳定性获得了大幅度提升,可以全方位符合军事领域车辆的使用需求,具备较高精度、较小体积以及数字化水平较高是该系统的显著优势[4]。
控制系统是电流数值环路、速度数值环路、位置数值环路3个环型的构造。电流数值环路的功能有:改善控制目标的传递函数形式,提升伺服系统响应的速度,及时控制系统力矩数值的扰动和电流数值的大幅度波动,设置系统的最大电流数值,保持系统具备足够的加速阶段转矩数值,并最大限度地保证系统运行的安全性。速度数值环路的功能是加强系统总体的抵抗负载扰动的效果。位置数值环路的功能是确保系统的静态精度数值及动态跟踪数值,这些参数关系着该伺服系统的总体稳定性。
2.3 伺服系统的控制装置构成简述
伺服系统的控制装置主要由伺服控制相关电路、通讯接口电路、伺服系统动力驱动电路、伺服系统电源供应电路、平面范围电机速度测试机构、方位角度相关传感装置、仰角变换电机速度测试机构、俯仰程度传感装置等部件构成,如图1所示。
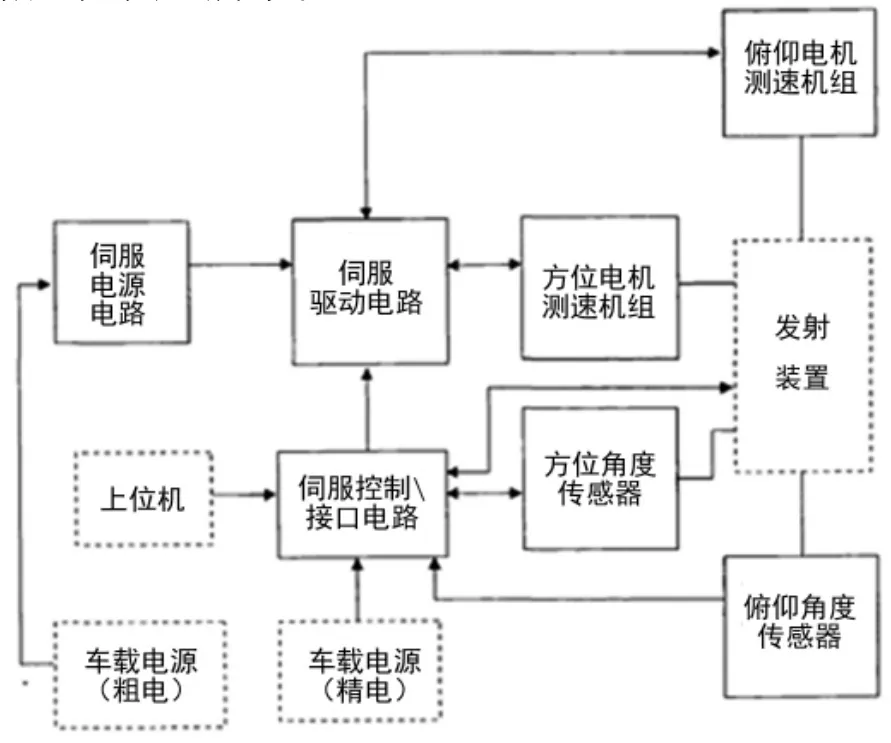
图1 车载伺服控制装结构组成原理图
3 伺服系统控制装置电路的设计
3.1 控制装置硬件部分电路整体设计
相关系统的硬件电路主要分为4个组成部分:控制、接口、驱动以及电源转化电路。控制部分以POWERCP为主,POWERCP是军工领域嵌入式控制模块的常用选项,选用该种方案作为控制单元可缩短设计周期、降低系统潜在隐患。驱动电路主要以APXE脉冲宽度调制放大装置SA04为主,包含积分电路及转速测量电路等等。接口电路包含过流保护检测装置、模式转换单元等等。供电电路包含车辆26V输入信号,经过DC-DC转变成±18V及+7V。总体结构方案如图2所示。

图2 伺服控制系统总体框图
3.2 系统驱动电路设计简述
SA04是一类脉冲宽度调制类型的运算放大器装置,可为负载供应4kW的功率。内部包含44kHz频率的振荡装置,无需与外部进行通讯。电流传感装置能为所有的半桥电路系统供应幅值与方向方面的相关信号。断开端可以断开H桥电路系统的4个驱动管装置。供电系统的电压VS≤110V,供电系统的电压VC值为(13~15)V,系统内部的功率损耗数值为330W,结温数值是155°C,模拟信号的指令输入数值为(2~8)V。电流环路使用PI模块进行控制,用高精度、低能耗的运算放大装置0P08作为电流调节器装置(见图3)采样的脉冲宽度调制放大器装置SA04的电流为感应端,通过差分电路进行放大操作之后,输入到积分电路,形成了电流的闭环控制系统[5]。
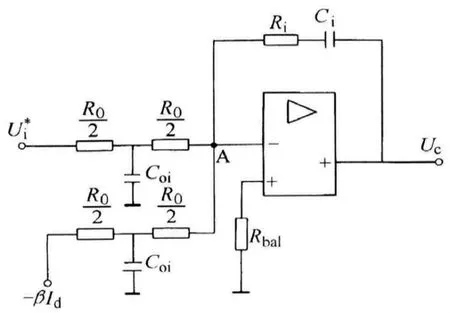
图3 PI型电流、速度调节器装置图
3.3 电源转化电路系统结构设计
电源转化电路通常由稳压电源单元、滤波系统电路、输出电路及泄放系统电路构成。稳压单元使用4并3串的模式,即4个28V/630W的电源并联成一组电源,随后并联3组再串联进行输出的模式,该方案能够达成电源的总输出数值为82V/88A的目的。滤波系统电路属于二级共模滤波模式。泄放系统电路由电子开关及功率电阻组成,开关通过功率电阻热效应消耗掉后续电机负载的能量,如果输出端电压小于85.5V时开关闭合,泄放系统电路停止运行。如图4所示。
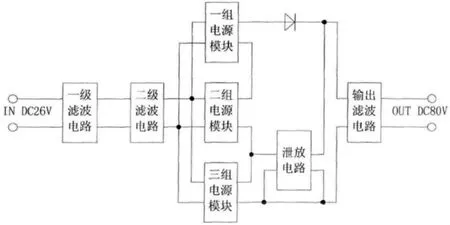
图4 电源转化电路工作原理图
4 结论与展望
4.1 结论
本文针对车载武器装置系统相应的伺服控制系统装置设计了总体框架结构,对于伺服系统控制装置的重要指标进行了详尽介绍,综合各项指标设计了控制方案相关模型,介绍了硬件电路软件系统的设计思路。因此,整体的伺服控制装置系统目前在部队列装的装备中取得了一定程度的实际应用,满足某型号车载反坦克导弹系统的核心技术参数,该系统的开发周期及研究经费获得了显著压缩及降低。
4.2 研究展望
通过本文的研究可以得出,非线性及强耦合的被控制目标愈发普遍,在高性能控制的情况下,常规的控制模式有很大的实现难度。这就促使新的控制模式、智能系统及其软硬件的持续升级,因此算法简单、容易实现、平稳性及鲁棒性优的伺服系统会获得更多的研究成果。
