应用LoRa 通信协议的松散式有界星群构型设计
2021-07-18张晓杰赵灵峰
张晓杰,张 璇,朱 野,赵灵峰
(中国科学院 微小卫星创新研究院,上海 201203)
0 引言
近年来,随着空间任务的逐渐复杂化(如空间卫星分布式探测、卫星编队执行合成孔径雷达或干涉仪任务等),仅靠单颗卫星完成一项飞行任务存在越来越多的局限性。采用低成本、短周期和高功能密度小卫星构建卫星集群,成员卫星之间通过信息流、能流和物流等进行互联,且具备一定的自组织能力,能为创新性的航天应用场景提供支持。
卫星集群可分为卫星编队和卫星星群[1]。卫星编队具有严格的队形要求及控制要求[2],一般设计为同轨道高度、同轨道面的前后串联式构型,以降低轨道控制投入,例如美国“21 世纪技术卫星”(TechSat21)计划[3]和瑞典“棱镜”(PRISMA)计划[4]。卫星星群无严格队形要求,一般通过对航天器相对运动的建模及运动周期的研究,实现将卫星控制在一定范围内保证星间的正常互联[5],例如美国“未来、快速、灵活、模块化、自由飞行”(F6)计划[6-8]、“蚁群”(ANTS)计划[9-11]及英国“天基镜群”(Satellite Cluster with a Multi-mirror System for Asteroid Deflection)方案[12]。
无论是卫星编队还是卫星集群,卫星间均需按照一定空间自组织网络进行数据互联,英国“基于航天智能的安全集成分布式可重构传感器网络”(ESPACENET)项目对空间自组织网络开展了一系列研究,主要开发基于皮纳卫星的分布式、灵活、可进化、可重构、智能空间传感器网络。此外,葡萄牙航空防御公司TEKEVER 也曾提出将地面无线自组网技术(Ad hoc)引入空间,作为星间通信协议的方案,但Ad hoc 网络对拓扑变化的高适应性也增加了网络路由的维护成本[13],对网络各节点的功耗提出较高要求,与低成本、低功耗的星群特性相违背。
LoRa(Long Rang)是一种非授权频谱的LPWAN 无线技术,具有远距离、低功耗、低成本、覆盖容量大等特点[14]。2013年8月,Semtech公司发布了首款LoRa 芯片,接收灵敏度可达—148 dBm,同时功耗极低,1 节5 号电池理论上可供终端设备工作10 a 以上。2018 年,南京邮电大学在分析地面物联网中LoRa 性能的基础上,对LoRa 在低轨卫星物联网下的性能进行了研究[15];2019 年英国开发了一种基于LoRa 协议的新型物联网卫星星座,该星座中每颗小卫星上基于LoRa 的空间网关均可通LoRaWAN 通信协议从地面或海上的物联网设备接收短数据消息[16];同年12 月,国防科技大学智能科学学院对基于LoRa 协议的卫星应急通信的多普勒效应进行了研究,完成了基于LoRa 的卫星与地面双向实时数据通信试验,证明LoRa 信号能有效地应用于低轨道卫星物联网[17]。
本文基于LoRa 协议在提高通信距离、消除干扰、扩展系统容量等方面的优势[18],提出将LoRa 技术应用于卫星星群,实现星群卫星间的信息互联,并依据LoRa 协议的特点提出了一种与之匹配的松散式有界星群构型的设计方法。该星群构型可在一定空间内容纳多颗小卫星(100~1 000 kg),且在轨构型维护简单,能有效降低构型维持成本,进一步实现星群低功耗的设计需求。另外,该星群构型适用范围广泛,对于其他通信协议下无特殊队形要求的、有界星群系统同样适用。
1 基于LoRa 协议的星群卫星通信
LoRa协议与Wi-Fi、蓝牙、ZigBee等现有成熟商用的无线技术相比,具有远距离、低功耗、低成本、覆盖容量大等优点,适合于在长距离发送小数据量且使用电池供电方式的物联网终端设备。基于货架终端节点传感器及开放的LoRaWAN 协议的支持,可实现低成本、短周期和高功能密度小卫星集群的构建。
根据LoRa 的网络架构及星群的应用需求,设计一主星携多辅星的星群架构,每颗辅星携带1 片内置LoRa 芯片,自成一独立终端节点。主星集成了网关/集中器、网络服务器及应用服务器功能,通过触发传输方式实现对每颗辅星探测数据及位置信息的周期性获取,完成探测结果预判及下传,接收地面任务指令,自主完成任务分解及规划,生成辅星任务控制指令及轨控需求。辅星节点携带特定传感器,实现任务数据的采集,并采用Class A 工作模式(触发式终端模式,本身不会主动发送数据,在接收到网关的触发指令或数据后,进行两次短时间的下发数据[14]),接收主星任务指令及轨控指令,将任务数据及本星位置信息传输给主星,并按照轨控指令完成轨道维持。星群拓扑构型数据流示意图如图1 所示。

图1 星群拓扑构型数据流示意图Fig.1 Data flow diagram of satellite cluster topolpgy configuration
由于遥控资源约束,任务规划及星群拓扑构型维持或重构需星群系统在轨自主完成,尤其是星群拓扑构型维持或重构,是系统安全、稳定运行的基础。根据LoRa 协议对于节点间位置的约束,设计一种简化的在轨星群拓扑构型及轨道保持策略是将LoRa 协议应用到空间星群系统的关键环节。
2 基于LoRa 协议的星群拓扑构型
LoRa 协议对于节点位置的要求主要在于通信距离的约束,目前地面距离约束为50 km,考虑空间环境特点,距离约束值可考虑放宽,如500 km。据此,设计一种一主星携多辅星的松散式有界星群,将所有辅星节点均安全稳定地控制在主星节点有效通信范围内,且设计碰撞规避策略,实现对LoRa通信协议的支撑。
首先,分析轨道参数对两星相对运行距离的影响。设置主星为一确定轨道参数,辅星轨道通过改变主星轨道参数的某一个量获得,通过仿真主、辅星距离变化的关系,找到轨道参数对于两星相对位置关系的影响。
主星初始轨道参数见表1。调整某一个轨道参数,其他轨道参数均相同,可得到6 组辅星轨道参数,见表2。

表1 主星初始轨道参数Tab.1 Initial orbital parameters of the principal satellite

表2 6 种辅星的初始轨道参数Tab.2 Six groups of initial orbital parameters of auxiliary satellites
选用HPOP 模型,假设主、辅星面质比相同,仿真分析卫星的6 个轨道参数单独对两星间距离的影响,如图2 所示。

图2 某一初始轨道参数不同的两颗卫星间距离1 个月(31 d)的变化情况Fig.2 Variations in the distance between two satellites with different initial orbital parameters within one month(31 days)

续图2 某一初始轨道参数不同的两颗卫星间距离1 个月(31 d)的变化情况Continued fig.2 Variations in the distance between two satellites with different initial orbital parameters within one month(31 days)
图中可见,不同轨道参数对于两星相对位置变化关系的影响不同。近地点幅角和真近点角,即相位不同的2 颗星,距离的周期性变化及累计变化相对缓慢;升交点赤经不同的两颗星,相对距离的周期性变化较大,累计变化相对缓慢;半长轴、偏心率、轨道倾角不同的2 颗星,相对距离的周期性变化及累计变化均较大,见表3。

表3 不同轨道参数偏差对两星位置变化关系的影响Tab.3 Effects of different orbit parameter deviations on the position change of two satellites
因此,为了构型维持简单,一般选用设计不同相位或升交点赤经的方式设计星座构型。设两星标称距离为R,辅星位置偏差裕度为ε,建立辅星虚拟星,辅星实际在以虚拟星为中心、半径为ε的圆内运动。若轨控周期为T,2 颗卫星间距的波动量Δd和2 颗卫星间距增加速度V的关系,如图3 所示。

图3 偏差裕度分析Fig.3 Analysis of the deviation margin
辅星相对于主星的运动包括周期性位置波动和长时间位置变化积累,在以T为周期控制的约束下,周期性波动和长时间累积位置偏差必须在偏差裕度范围内,因此,其偏差裕度必须满足如下关系:

以上单独考虑了2 颗卫星间的相对距离的变化关系,并未考虑2 颗卫星的相对方位角的变化关系,实际上2 颗星的相当方位角也是按不同规律变化的。因此,辅星必存在于以主星为中心、主星与辅星虚拟星距离为半径、偏差裕度的2 倍为厚度的球形壳体内。根据单一轨道参数偏差,设计星群构型,其星群切面如图4 所示。其中,主星偏差裕度为εmain,辅星偏差裕度为ε。

图4 星群系统构型Fig.4 Configuration of the satellite cluster system
主星与每颗辅星的距离dn的求解公式为

式中:n为整数,表示辅星序号,若该星群布置N颗辅星,则满足0 <n≤N。
该星群拓扑构型的优点:只需周期性控制每颗辅星相对于虚拟星位置即可,无需再考虑任意两星的碰撞问题,当轨控裕度一定时,则轨控周期确定。
星群系统构型的设计步骤如下:
步骤1通过星群系统有界要求及偏差裕度要求,求得主星周围最多可布置的辅星数目;
步骤2根据任务要求确定实际发射辅星数;
步骤3求得每颗辅星虚拟星到主星的初始轨道根数偏差,即得到实际主、辅星分层结构;
步骤4通过各辅星虚拟星与主星的初始轨道参数偏差计算得到每颗辅星的轨道控制周期。
3 实例应用
建立轨道高度700 km、轨道倾角45°为主星的星群构型,采用LoRa 技术作为星间通信协议,有效通信距离为200 km。
不同近地点幅角偏差两星初始距离、两星距离波动量、两星距离增加速度的变化情况,如图5所示。

图5 主、辅星初始距离,距离波动量,距离增加速度随近地点幅角初始偏差的变化曲线Fig.5 Variations of the initial distance,the fluctuation quantity,and the distance increase velocity between the principal and auxiliary satellites with the initial deviation of the argument of perigee
随着初始近地点幅角偏差的增大,主星与辅星初始距离线性增大,线性增大系数k为123.34 km/(°)。通过调整近地点幅角偏差的初始偏差值来对辅星位置进行布局,离主星越近的球形壳体内的辅星,其初始近地点幅角偏差越小,离辅星越远的球形壳体内的辅星,其初始近地点幅角偏差越大(如图4 所示),必须存在如下关系:

根据任务要求,通信距离约束为200 km,设主星偏差裕度εmain和辅星的偏差裕度ε均为10 km,按照此方法布局辅星能够布局的最大数量为n,则必满足dn=L−ε,得到最多可布局卫星数为9 颗,即星群系统规模最大为10 颗,其中,1 颗主星,9 颗辅星。
得到星群布局架构:主星为中心,9 颗辅星按照初始近地点幅角相对主星依次递减约0.016 2o进行均匀布局,其中,最里层辅星与主星初始近地点幅角偏差Δγ1=d1/k≈0.162°,最外层辅星与主星初始近地点幅角偏差Δγ9=d9/k≈1.459°。星群系统轨控周期见表4。
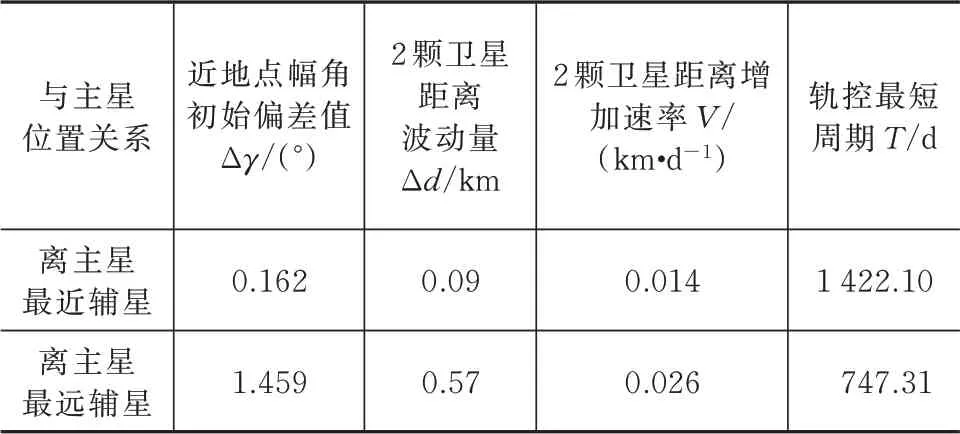
表4 所设计星群架构的扩散特性及轨控周期要求Tab.4 Diffusion characteristics and orbit control period requirements of the designed cluster architecture
最内层(第1 层)辅星轨控周期为1 422 d,最外层(第9 层)轨道控制周期为747 d。卫星在轨只需要根据每颗辅星的轨控周期,定期根据该辅星与主星的相对位置关系进行轨道维持,以将该辅星控制在相应“壳层”内即可。
4 结束语
本文针对当前卫星星群项目规模的扩大化以及对低功耗、低成本要求的逐步增加,提出了一种基于LoRa 无线通信技术的星群系统架构。根据LoRa 通信协议的特点,进一步提出了一种适应于该卫星系统架构的松散式星群拓扑构型。该星群拓扑构型克服了当前简单的串联式星群架构的设计约束,具有卫星相对位置松散多样、设计方便、后续构型维持简单等优点,且适用于其他通信协议下无特殊队形要求的松散式有界星群系统,应用范围广。本文通过对应用实例的分析,证明了该方法的实际可操作性和简便性。后续研究的方向为偏差裕度的最优化选取,在特定的有界范围实现尽可能大的卫星容量,以在当前星间通信体制的约束下满足不断增大的星群规模需求。
