工作环境下PSD系统精度测定
2021-07-16高晨峻王凯丽惠富豪董言治
高晨峻,王凯丽,尉 懿,惠富豪,董言治
(烟台大学光电信息科学技术学院,山东 烟台 264005)
在如飞机着舰、发动机试车、直升机螺旋桨旋转等武器装备的使用过程中,系统会受到交变应力和冲击应力,这对装备整体的外形、关键结构、连接等都提出了很高的要求[1-2]。准确获取在交变、冲击或复杂载荷(如风载荷)条件下,装备整体、关键结构、连接等关键点的瞬态三维运动状态,对于武器装备整体设计、结构设计、连接方式的设计及评价均有重大意义。PSD(Position sensitive device)光电动态测量系统以其响应速度快、测量精度高、信号处理电路相对简单、对光学系统和光源要求不高等优点被广泛应用于各种测量领域[3-5]。
在工程环境下,PSD系统测量前要进行精度和可靠性测定以确定是否满足测量要求。通常,PSD光电动态测量系统的稳定性和精度等指标的标定和测试需要依靠精密的测试设备进行,但实际应用环境中基本不具备稳定使用这些精密仪器的条件,而且标定精度要求也没有那么苛刻,只需要判断是否满足工作要求即可[6-7]。
本文通过基于PSD的远距离定位光靶标识别系统在工作环境下获得的大量实际测量数据,对系统精度标定进行了研究。PSD的远距离定位光靶标识别系统是基于理论空间定位原理及靶标识别技术而运行,本文在PSD系统实际工作环境下获得了大量实际测量数据,进一步结合统计学原理和理论数据分析准则,分析了系统定位误差并进行了系统精度检验。统计估计及拟合数据表明,PSD系统在实际工程应用中,具有可信的满足要求的精度,且文中的精度标定方法在不同的工程测量和统计数据分析中具有很大的实用意义。
1 PSD系统原理与构成
1.1 PSD基础理论
PSD是一种基于横向光电效应的光电传感器件,和普通光电二极管相比,有相似之处也有不同之处,工作原理上有着本质的区别。普通光电二极管工作原理是以P-N结的纵向光电效应为基础,而PSD是以P-N结的横向光电效应为基础的,进而PSD输出的光电流不仅能反映光的强弱,还能够反映光的位置,因此被称为位置敏感器件,在位置测量上有着广泛应用[8-9]。
1.2 PSD工作原理
图1,L表示PSD光敏区域的边长,设I0为光电流密度,两端输出电流分别为I1和I2。
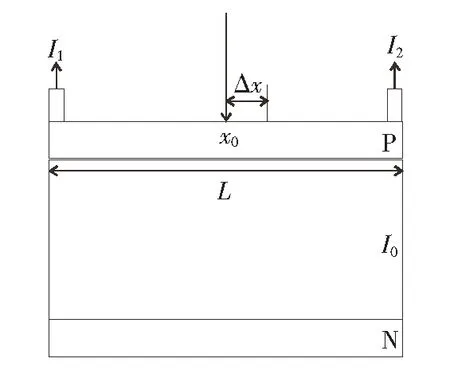
图1 一维PSD结构
当光直射到x0处时,根据电流公式可得:
(1)
(2)
式(1)、(2)是以x=0处为坐标原点计算的,若以x=L/2处为坐标原点,光照射的位置距离坐标原点的长度为
(3)
(4)
(5)
Δx的数据即为坐标。
将2个PSD分离叠加(图2)。PSD在2个方向上的感光层是相互独立的,一层作为接收x方向上光点的位置变化,另一层作为接收y方向上的位置变化。

图2 二维PSD结构
由上述推导过程同理可推导出在y方向上的位置坐标:
(6)
对于LED光标,PSD将获取幅度信息,通过对信号进行处理并应用推导式(5)和(6),就可获得每个LED光标的位置信息。
1.3 PSD相机测量系统的组成
本系统主要由靶标控制器、LED面阵靶标、PSD相机、FPGA信号处理和控制电路组成,处理后将坐标信息输出至上位机。LED面阵发射靶标与PSD接收单元相距20 m,如图3。整个测定过程中为降低环境光对结果的影响,均在夜间进行,由于测定场所位于工业园区,来自园区的光污染仍无法避免。

图3 PSD相机测量系统组成
2 实测数据处理及系统精度分析
2.1 实验数据获取
2.1.1 系统主要参数 LED靶标主要由调制近红外LED面阵的发射源组成,功能为在控制器系统的控制信号下,辐射符合要求的光脉冲,为系统的靶标识别提供光源。光源采用脉冲驱动,调制频率为1000 Hz,占空比为50 %,其光谱为940 nm红外光,光靶标的位置由常规钢尺测量,钢尺的最小刻度为1 mm。PSD相机及信号处理子系统由相机镜头、PSD相机、PSD信号处理电路(简称接收器)组成。接收控制器主要由FPGA高速芯片组成,FPGA处理系统使用的是ALTERA公司的CYCLONE IV系列,型号为EP4CE30F23C7,484个引脚的FPGA封装。接收机机箱前面板镶嵌PSD相机镜头,无外部连接。
2.1.2 测量数据按照2种测试情况分别获得 测试1,镜头对准光源,采集系统以每秒约20 Hz的采样率获取信息,经过连续采样获取坐标信息,经过FPGA信号处理,通过串口输出坐标信息,此坐标信息包含光点在2个方向上的距离,即x轴数据和y轴数据。然后进行测试1的另1组实验,为测试光源移动后PSD的工作情况,将光源水平平移3 cm,再连续获取1组坐标信息。
测试2,调整镜头收端指向,角度偏转为30°,重复测试1的步骤,获取1组坐标信息。再将光源水平移动3 cm,获得测试2的另1组数据。至此共获得4组数据。
实验中直接获得数据为x轴与y轴位置数据,在工程应用中,受实际环境因素和位置的影响,PSD设备不可避免地转动,进而导致坐标系旋转,以PSD中心为坐标原点,对x轴与y轴进行进一步处理,取
(7)
即可代表光点到坐标原点的距离,更为准确。
2.2 测量数据处理流程
整理实测数据时,往往会遇到数据中少数几个偏差过大的可疑数据,可能由于过失误差引起,这些数据称为坏值[10]。 在计算精度之前,需要将坏值剔除,使测试获得的数据规律更为准确。使用拉依达准则(也称3σ准则)剔除坏值,这是1个经典的方法,设N个数据的均值为μ,标准差为S,数据值落入区间(μ-3S,μ+3S)中为可信数据。剔除坏值后,4组数据通过python程序整理后[11]得到图4—图7。

图4 测试1第1组

图5 测试1第2组

图6 测试2第1组

图7 测试2第2组
2.3 PSD定位误差分析
已经确定了Z的分布均近似为高斯分布,进而对PSD定位误差进行分析,2次实测对应的平均值μ和标准差σ由下表给出。
表1和表2中PSD相机的摆放位置即为实测获取数据时相对光源的位置,分别为光源正对PSD相机的位置和光源平移3 cm后的位置。镜头偏转30°后重复测试分别获取到第2组数据。

表1 测试1 镜头对准光源

表2 测试2 镜头偏转30°
PSD的测量精度可由标准差得到,即可由式(8)近似:
因此,σZ=0.007 3 mm。
2.4 靶标测量精度分析
LED靶标在PSD表面成像的光路如图8。
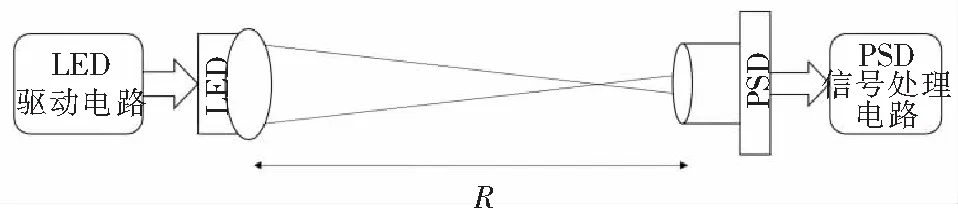
图8 LED靶标成像光路
根据光学镜头成像原理,可得到近似公式(9):
(9)
式中R为LED靶标与PSD探测之间的距离,ΔXPSD为LED横向移动位移。同理可得Y坐标公式(10):
(10)
因此,PSD能测量的最小LED横向移动位移可由式(11)、(12)给出:
(11)
(12)
综上,对Z进行计算,可得:

(13)
即当LED靶标位于距PSD相机20 m时,其对应的最小测量精度为
ΔZLED_min=0.017 2 m。
2.5 正态总体的区间估计


接着根据F分布分位点的性质推出如下关系:

根据上式及t分布定义,可得到μ1和μ2的置信系数为1-α的置信区间:

实验中,调整镜头收端指向,偏转为30°,测得新数据,再用以上方法,求得置信区间分别为(-2.32,4.24),(-13.5,19.84)。
在以上数据处理中,四组数据的置信区间均包含了0,也就是说,μ1可能大于μ2,也可能小于μ2,这时,就认为μ1和μ2没有显著差异,即此PSD设备测试数据准确。
2.6 正态总体的F检验
确定完均值的准确性,接下来继续利用正态总体的方差比,进行F检验。


经查表得F60,60(0.001)=2.25,继而 1.98<2.25,1.60<2.25,1.57<2.25,1.44<2.25,所以接受原假设,认为测试1和测试2准确,波动性很小。继而可以得出测量准确度为1-0.001=0.999,即为99.9%。
3 总结与展望
基于PSD的远距离定位光靶标识别系统在按照设定的数据获取方式获得实测数据后,上传至上位机,通过python进行了系统测量精度研究。
首先进行数据预处理,剔除坏值,并通过对实测数据的频数直方图绘制以及正态曲线的拟合,确定数据总体为正态分布。随后对系统定位误差和测量精度进行了分析,讨论了正态总体的区间估计和F检验,算法均用python进行了编程实现。结果显示,在系统能够有效辨识靶标且探测距离达到20 m的情况下,测量精度约为1.72 cm,测量准确度大于99.9%,系统满足测量要求,工作稳定可靠。
研究表明,系统测量精度已经达到工程标准,测量结果可信,但不足之处在于实际工作环境可能更加复杂多变,没有充分考虑更多外部环境因素对精度的影响,将会在后续的研究中解决这类问题。
