地面最小操纵速度临界性评估方法研究
2021-07-14张海妮屈展文
张海妮,屈展文,张 强
(1.中国飞行试验研究院,陕西 西安 710089;2.中国民用航空上海航空器适航审定中心,上海 200335)
1 引 言
地面最小操纵速度(VMCG)是飞机关键速度之一,对飞行安全有很大的影响。同时,VMCG也是一个基准速度,可为起飞决断速度V1提供一个最小可接受的值[1]。因此,VMCG确定试飞是民用运输类飞机合格审定必须完成的重要试验之一。VMCG受很多因素的影响,包括重量、重心的影响[2]。试飞时,通常要求选择最为临界的重量和重心进行试验,以确保试验结果的临界性及准确性。目前,重量、重心对于VMCG的影响尚无明确定论,国内外相关机型的VMCG试飞甚至进行了所有重量、重心组合下的飞行试验,大大降低了试飞效率,给试飞周期带来了不利影响。因此,有必要研究一种VMCG临界性评估方法,构建VMCG试飞中的重量、重心最小矩阵,以提高试飞效率、缩短试飞周期。
本文基于虚拟数值仿真技术建立了一种VMCG临界性评估方法,对某型飞机的VMCG临界性进行了计算评估,所形成的方法可为其他飞机的VMCG临界性评估提供参考。
2 仿真模型架构设计
VMCG数值仿真基于Simulink开展,仿真模型的设计必须以试飞方法为基础进行。根据CCAR25部对VMCG的定义以及国内外民用运输类飞机的VMCG试飞经验,VMCG通过如下试飞方法获得:试验前将飞机设置为规定的起飞构型,并按起飞程序配平,发动机功率设置最大起飞功率。在预先选定的速度上切断临界发动机燃油,当驾驶员感觉到飞机航向跟踪特性的明显变化或根据外界参照物看到飞机航向偏离确认临界发动机停车后,快速向工作发动机方向蹬满舵,使飞机恢复到平行于跑道中心线方向并继续滑行,整个试验过程中不使用刹车。综上所述,除了常规的气动力模块、发动机模块、飞行控制系统模块等,在地面最小操纵速度数值仿真中需要设计特殊模块来实现以下功能:发动机失效控制功能、驾驶员纠偏时机控制功能;飞机地面滑跑航迹控制功能。基于上述原因,设计了模型总体架构,如图1所示。其中,针对地面最小操纵速度的特殊模块通过自动驾驶仪的功能实现。

图1 Simulink仿真模型总体框架
3 仿真模型
3.1 飞机动力学模型
飞机动力学仿真模型包括飞机的气动力模型、发动机模型、质量模型和飞机的动力学与运动学方程。该模型的输入由26个独立可控的舵面信号和4个引擎控制信号组成。其中,气动力模型用于计算飞机飞行时的大气数据和气动数据;发动机模型建立了飞机推进系统的仿真模型;质量模型用于计算飞机在不同重量和重心位置时的惯性矩;飞机的动力学与运动学方程则描述了飞机在气动力、发动机推力和重力作用下的运动。
3.2 舵回路模型
舵回路模型给出了液压机械控制系统的控制指令到飞机操纵面位置、发动机状态和起落架位置的对应关系,模拟飞机的舵机控制回路。
3.3 飞行控制系统模型
飞行控制系统模型建立了飞机的自动飞行系统。该自动飞行系统模型内部由飞机液压机械飞行控制系统模型(FCS)组成内部控制回路,自动驾驶仪和自动油门系统组成外部控制回路。其中,FCS模型用于将自动驾驶仪和自动油门产生的控制信号转换为舵回路所需的舵面偏转信号;自动驾驶仪和自动油门则根据选择的控制器和控制量来计算飞机所需的控制信号。
3.4 自动驾驶仪模型
为了满足地面最小操纵速度仿真需求,在自动驾驶仪模块中设计了横向控制器(见图2)、航向控制器(见图3)、滑跑航迹控制器(见图4)以及发动机失效设置控制器(见图5)。数值仿真中,利用横向控制器控制飞机滚转角,使计算过程中机翼维持水平状态;利用航向控制器控制飞机的航向角,使得飞机航向最终恢复并维持至初始航向;利用滑跑航迹控制器控制航向控制器的接入时机,该控制器以飞机横向位移(偏离跑道中心线的横向位移)作为纠偏时机的判断条件,当横向位移大于1m时,认为驾驶员意识到飞机航向偏离,接入航向控制器;利用发动机失效设置控制器设置发动机失效条件,该控制器以实时空速判断发动机是否满足停车条件,当条件满足时发动机将进入失效状态。

图2 横向控制器

图3 航向控制器

图4 滑跑航迹控制器

图5 发动机失效设置控制器
4 仿真计算及结果分析
4.1 仿真状态及仿真流程
以某型运输类飞机为例,基于仿真计算平台对不同重量、重心条件下的VMCG进行仿真计算,仿真状态如下:
(1)重量、重心:大、小重量及前、后重心的不同组合(共4种组合状态);
(2)发动机停车速度VEF:分别为57m/s、55m/s、52m/s;
(3)襟翼位置:起飞位;
(4)起落架位置:放下。
针对VMCG仿真计算的特殊设置如下:
(1)按照计算状态将飞机配平至起飞状态;
(2)将飞机的横向控制器设置为滚转保持模式(滚转角为0),将飞机的航向控制器在发动机失效航向跟踪特性产生明显变化(横向位移大于1m)后接入,同时将飞机发动机调整至起飞状态;
(3)设置切断临界发动机燃油时的速度VEF;
(4)仿真过程中的临界发动机停车速度从较高速度开始,并视情况逐渐降低,直到横向位移约为9m为止。
4.2 仿真结果
4.2.1 大重量、前重心
大重量、前重心条件下的仿真结果如图6-图9所示。

图6 临界发动机推力示意图

图7 侧向位移示意图

图8 方向舵偏度示意图

图9 偏航角示意图
4.2.2 大重量、后重心
大重量、后重心条件下的仿真结果如图10-图13所示。

图10 临界发动机推力示意图

图11 侧向位移示意图

图12 方向舵偏度示意图

图13 偏航角示意图
4.2.3 小重量、前重心
小重量、前重心条件下的仿真结果如图14-图17所示。

图14 临界发动机推力示意图
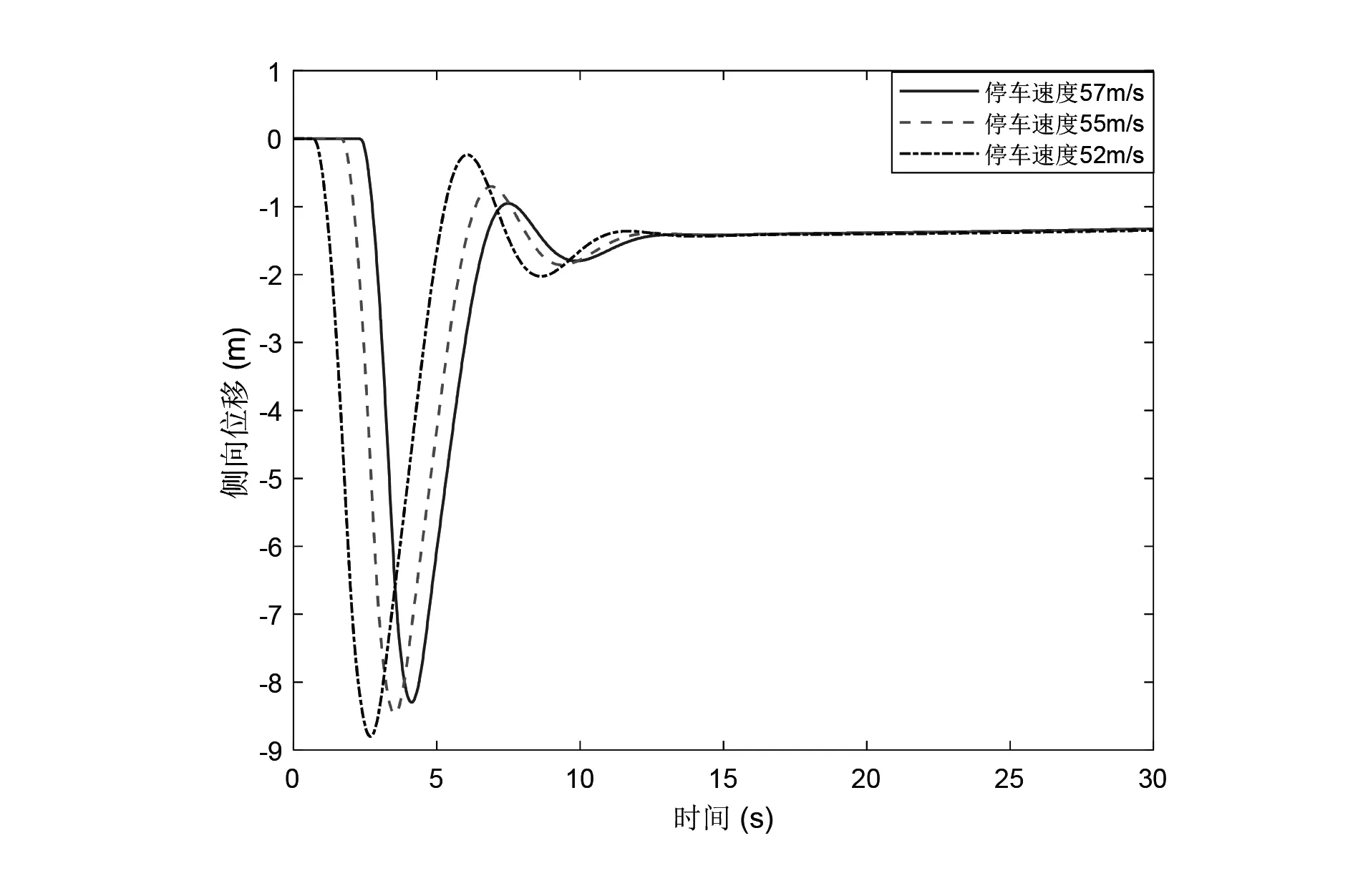
图15 侧向位移示意图

图16 方向舵偏度示意图

图17 偏航角示意图
4.2.4 小重量、后重心
小重量、后重心条件下的仿真结果如图18-图21所示。

图18 临界发动机推力示意图
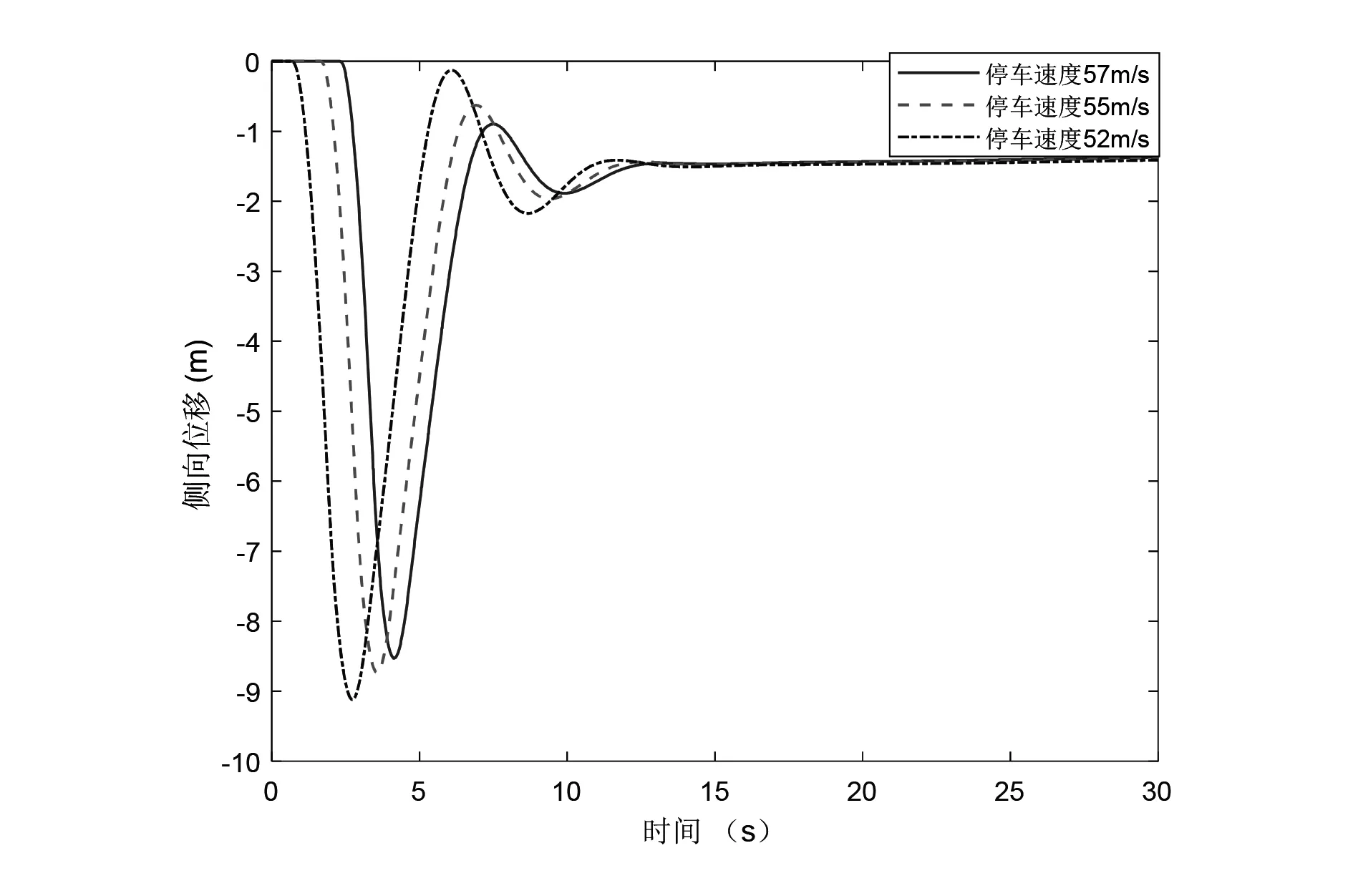
图19 侧向位移示意图

图20 方向舵偏度示意图

图21 偏航角示意图
4.3 仿真结果分析
根据仿真结果,得出飞机在不同重量、重心条件下的临界发动机停车速度与侧向距离的关系,如图22所示。由图可知,同样的重量、重心条件下,随着停车速度降低,飞机的侧向距离增加。地面最小操纵速度定义为侧向距离为9m时的发动机停车速度,上述4种状态下的地面最小操纵速度分别为:56.4m/s(大重量、后重心)、54.3m/s(大重量、前重心)、52.0m/s(小重量、后重心)、50.4m/s(小重量、前重心)。可见,随着重量增加,该型飞机的地面最小操纵速度增加;重心越靠后,飞机的地面最小操纵速度越大。因此,该型飞机的地面最小操纵速度试验应以大重量、后重心状态进行。
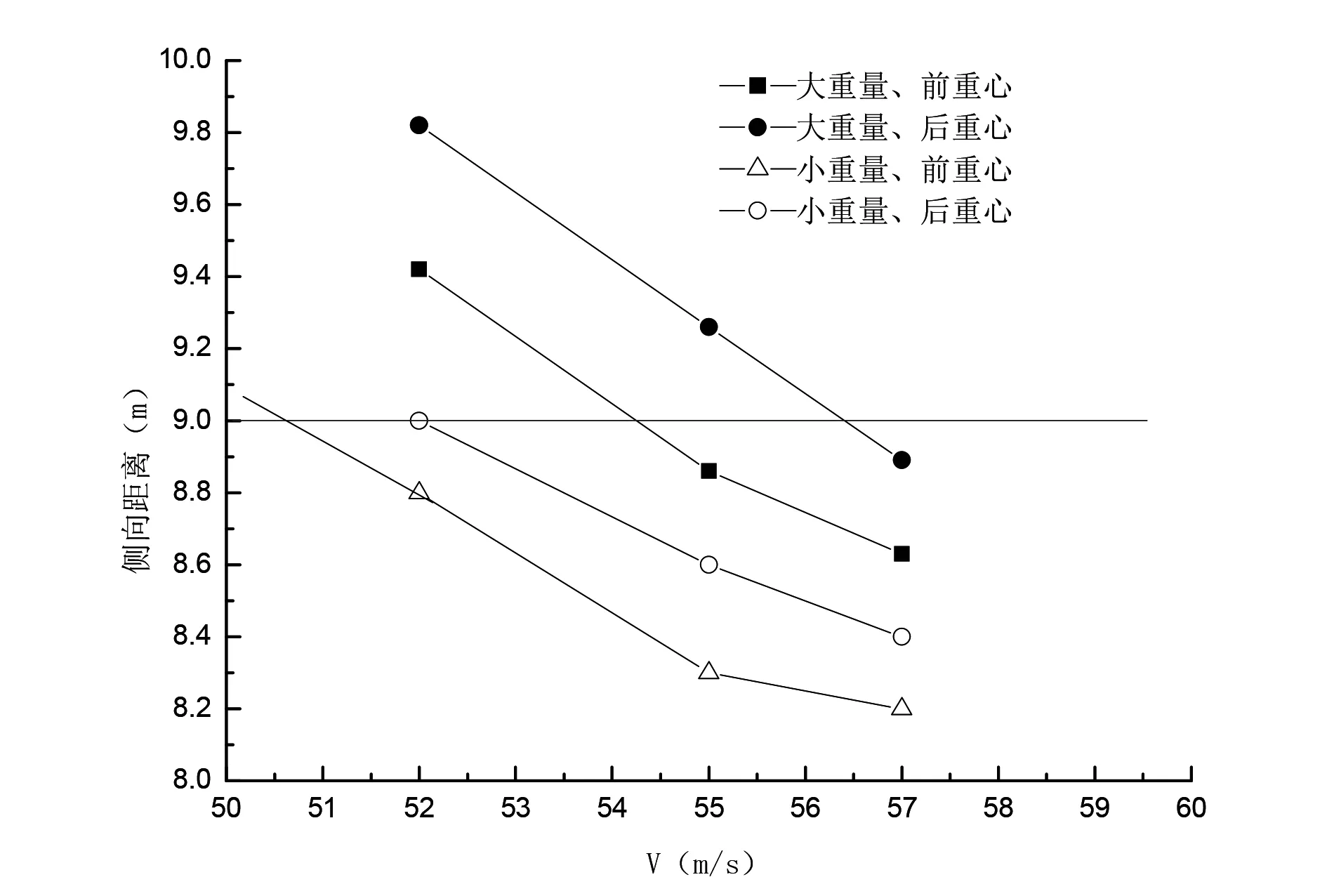
图22 侧向距离与速度的关系示意图
5 结 论
本文通过虚拟仿真技术,对地面最小操纵速度的临界性进行了分析,所建立的方法可为其他飞机的地面最小操纵速度临界性分析提供参考。由于地面最小操纵速度的临界性与飞机发动机布局等因素有关,因此,本文的仿真结果具有一定的局限性,并不适用于所有飞机。后续可通过更进一步的研究,对不同特性飞机的地面最小操纵速度临界性进行研究,为民用运输类飞机的地面最小操纵速度提供支持。
