基于改进ORB和RANSAC算法的无人机影像特征匹配方法
2021-07-13丁进选王丽欣苗星雷
丁进选,王丽欣,苗星雷
(1.深圳市长勘勘察设计有限公司,广东 深圳 518003;2.黑龙江省测绘地理信息学会,黑龙江 哈尔滨 150080;3.哈尔滨北方防务装备股份有限公司,黑龙江 哈尔滨 150050)
无人机航摄具有机动灵活、高效快速和作业成本低等优点,在各领域得到广泛的应用[1-2]。由于在一些应用中通常需要覆盖整个研究区域的影像,因此需要对无人机获得的影像进行拼接。影像特征匹配作为其中一项关键环节[3-4],得到众多研究者的关注。David Lowe等于1999年提出了著名的SIFT算法,并于2004年进行了改进[5]。Leutenegger等为解决SIFT算法实时性的问题,于2011年提出了BRISK算法[6]。Pablo等人于2012年提出了KAZE算法,但该算法对仿射畸变不耐受[7-8]。Rublee等人于2011年提出了一种对图像的平移、旋转、缩放等矩阵变换具有不变性的ORB算法,该算法具有计算速度快、占用内存小等特点[9],但是该算法尺度性较差。部分学者从不同角度对ORB算法进行了改进[10-11],但是均未有效解决ORB算法尺度性弱的问题。
本文在总结和分析ORB算法优缺点的基础上, 提出一种改进的无人机影像匹配算法。该算法首先利用改进的ORB算法提取具有尺度不变特性的特征点,并在特征匹配阶段基于改进的RANSAC算法进行误匹配的剔除,最终实现无人机影像特征的精确匹配。
1 ORB算法的改进
传统ORB算法分为特征点的检测和描述两部分,该算法具有对平移、光照和旋转不变的特性[9],但是由于该算法未给描述子提供尺度信息,因此该算法不具备尺度不变性[12]。因此当影像尺度发生较大变形时,该算法性能表现较差。在ORB算法中,通常采用Harris角点函数对探测出的特征点进行排序,传统的Harris角点函数不具备尺度信息。
因此本文针对上述问题通过对Harris角点函数改进以使检测出的特征点具有尺度信息。

(1)
式中:σD是抵消缩放的微分尺度;σI是抑制噪声的高斯函数,此处σI=SσD,S为经验值,通常取0.7,其构造尺度空间的角点函数为:
cornerness=det(μ(x,σI,σD))-atrace2(μ(x,σI,σD)).
(2)
用LoG函数进行尺度检测,则:
(3)
式中:σn代表特征点尺度函数。对函数进行检测之后即可得到具有尺度信息的特征点。
2 RANSAC算法的改进
RANSAC作为一种经典的特征点对误匹配剔除算法,其首先采用无差别的方式在所有的特征点中进行随机采样,然后通过式(4)计算两幅图像之间单应矩阵的转换参数。
(4)
式中:(x,y)和(x′,y′)为待匹配点对坐标,其中a0…a7表示两幅图像之间的平移、旋转和缩放[13]。研究发现,粗匹配得到的部分特征点对存在较大的误差,在经典RANSAC算法中此部分点仍会被带入单应矩阵,这些误匹配导致RANSAC算法计算速度减慢,计算效率降低。当特征点数目较多时,上述缺陷变得尤为严重。因此本文引入空间一致性算法[14]的思想对RANSANC算法进行改进,通过空间一致性算法剔除误匹配点、缩小抽样点集样本数,减少迭代次数。
空间一致性理论基本思想:如图1所示为两面相似的窗户,若在每面窗户上分别检测出如图1所示的12个特征点,对于左侧窗户中圆中心的红色特征点,虽然其与右侧窗户中相同位置点的特征相同,但是考虑到其8邻域特征点的信息,则可知这两个特征点并不匹配,此即空间一致性理论的基本思想。
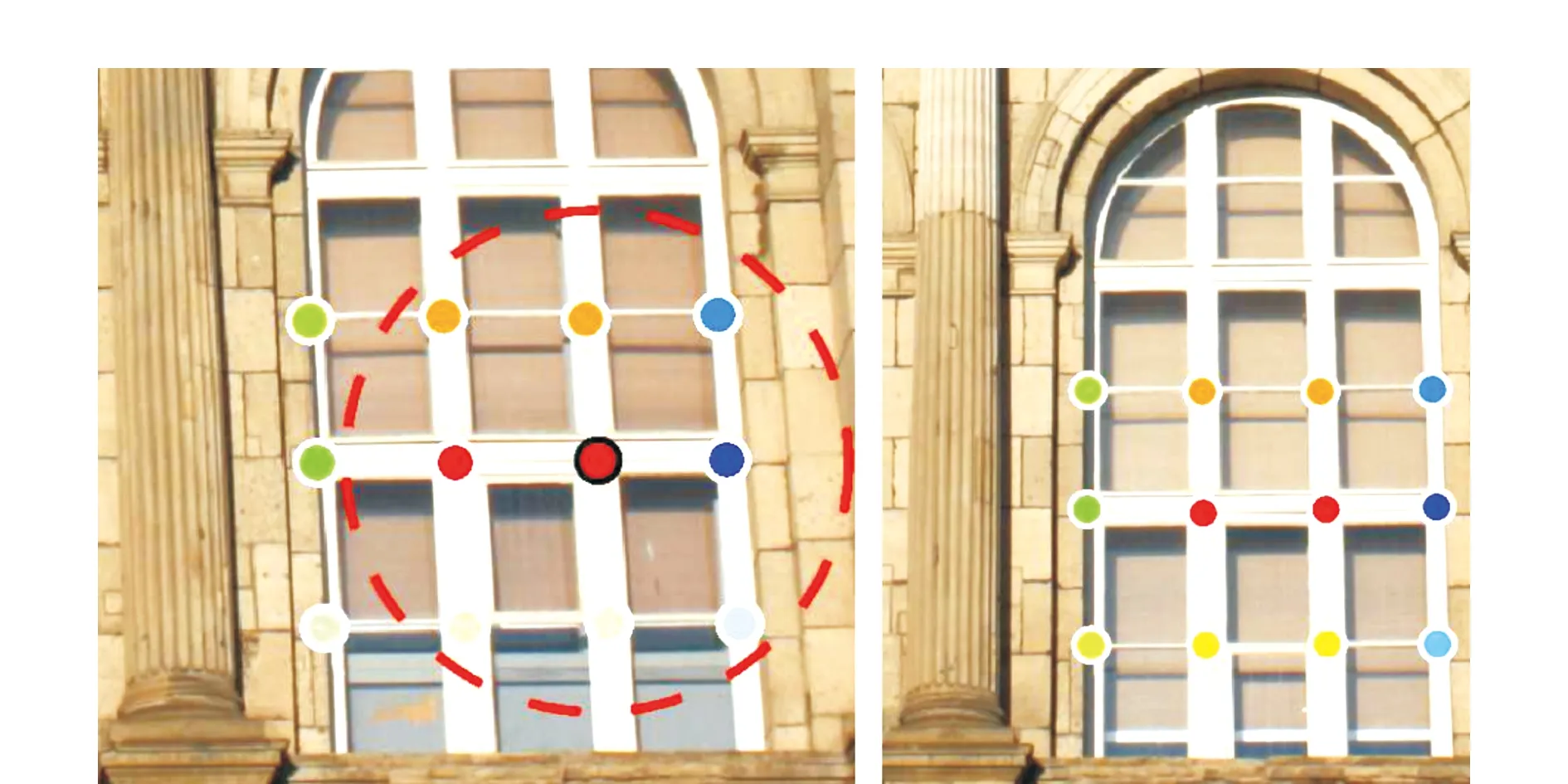
图1 空间一致性理论基本思想
空间一致性理论基本原理:对于任一影像Ii,定义其对应的尺度不变函数为:
NIi={(xj,yj,σj,dj)}.
(5)
式中:(xj,yj)是特征点中心对应的坐标;σj是图像的尺度;dj是特征点对应的描述子。
若将任一特征fi的邻域集合定义为NGi(fi),则该集合包含以(xj,yj)为圆心,rσj为半径的圆内的特征点,尺度范围为(sminσj,smaxσj)。
NIi(fj)={fk∈f(Ii){fj}|‖(xk-xj,
(6)
式中:∧为取小运算。
设有一图像对(I1,I2),定义该图像对特征点构成的匹配点集为C,则可得:
C={(f1,f2)|f1∈f(I1)∧f2∈f(I2)}.
(7)
N(c)={(f1,f2)∈C|f1∈
(8)


3 改进算法实验与结果分析
3.1 实验方案
为验证本文提出改进算法的普适性,本实验选用了两组具有代表性的无人机影像对,一组为城区包含建筑、道路和植被的影像对(研究区1),另外一组为郊区包含灌木、草地和裸土的影像对(研究区2),影像分辨率为640像素×426像素。分别采用本文改进算法和ORB+RANSAC算法对同一影像对进行特征点提取和匹配试验,并从提取特征点个数、特征匹配用时、最终总匹配数等角度进行对比分析。本试验的运行环境为:ThinkPad笔记本,处理器i5,CPU2.5 GHz,内存8 G,Windows7 64位操作系统。
3.2 实验结果与分析
3.2.1 实验结果
为验证本文提出算法的性能,首先对本文提出的改进算法和原算法(ORB+RANSAC算法)的特征点检测性能进行实验,然后进行匹配实验,两组影像对特征点检测结果见图2和图3;基于改进算法的粗匹配和精匹配结果见图4和图5;特征点对个数和匹配等信息见表1;改进算法尺度不变性实验结果如图6所示。
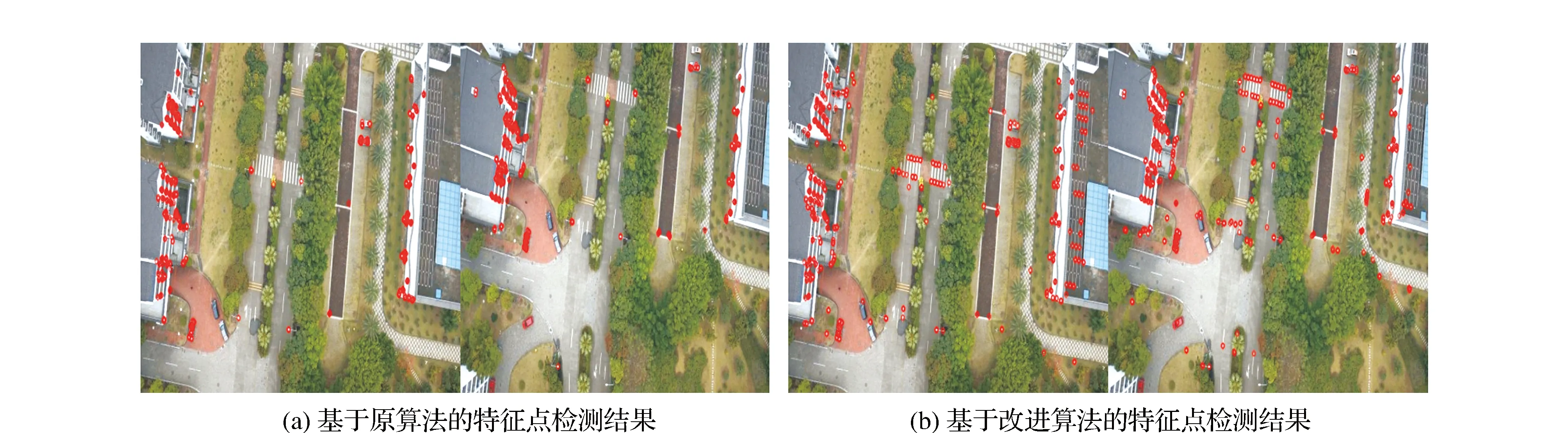
图2 研究区1特征点检测结果

图3 研究区2特征点检测结果
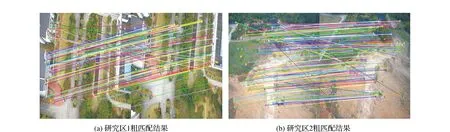
图4 基于改进算法的粗匹配结果
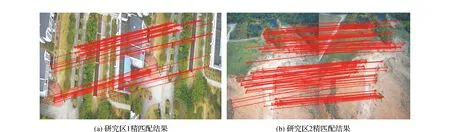
图5 基于改进算法的精匹配结果

表1 算法性能比较
3.2.2 结果分析
通过图2和图3可知,对于本研究选取的城区影像对(即研究区域1)和郊区影像对(即研究区域2),改进算法提取的特征点个数均有所增加;实验结果表明,对于城区影像对右侧的影像,原算法检测出特征点500个,本文提出的改进算法检测出特征点507个;对于郊区影像对右侧的图像,原算法检测出特征点490个,本文提出的改进算法检测出特征点538个。
通过图4可知,对于本文提出的改进算法,在实验所用的两组影像对上进行粗匹配时仍存留一定的误匹配。
表1的研究数据显示本文所提出的改进算法在匹配精度上均有明显提升。如对于城区影像对匹配精度由24.12%上升到38.20%,提高了14.08%;对于郊区影像对匹配精度由41.55%上升到61.06%,提高了19.51%,印证了本文改进算法在剔除误匹配方面的有效性。
在匹配总用时方面,对于城区影像对,本文所提出的改进算法与原算法相比缩短了521 ms,效率提升约16%;而对于郊区影像对,本文算法用时比原算法减少559 ms,效率提升约19%。
通过图6可知,本文提出的改进算法能够有效克服影像尺度变化带来的影响;对于研究区2当影像尺度缩放为原尺寸80%时,改进算法识别出内点59对,匹配精度为39.07%;当影像尺度缩放为原尺寸70%时,改进算法识别出内点33对,匹配精度为25.38%;随着尺度变化的增大,改进算法匹配性能呈下降趋势。
4 结束语
本文对ORB算法和RANSAC算法进行了研究,结合前人的研究对Harris角点函数进行了改进,并将空间一致性理论应用到了RANSAC算法中,并选取两组具有代表性的无人机影像进行实验。实验结果表明,本文设计的改进算法,在特征点识别、误匹配剔除和尺度不变性方面的性能均有明显的提升,表明本文提出的改进算法在无人机影像配准方面的有效性,对解决影像配准具有一定的借鉴作用。