水下反蛙人火箭弹六自由度弹道仿真
2021-07-12王金云王孟军周晖杰
王金云, 王孟军, 周晖杰
水下反蛙人火箭弹六自由度弹道仿真
王金云1, 王孟军1, 周晖杰2
(1. 河北省双介质动力技术重点实验室, 河北 邯郸, 056017; 2. 宁波大学 科学技术学院, 浙江 宁波, 315212)
水下火箭弹作为近海港口防御的一种新型预置武器, 具有速度高、杀伤力大、使用方便等优点, 可有效对抗敌方蛙人的侵扰。为深入探索其水下弹道航行特性, 以某型水下火箭弹为研究对象, 建立水动力学弹道运动模型, 基于VC++语言自主编程, 对水下火箭弹六自由度弹道航行特性进行仿真, 并通过水下发射试验对其航行稳定性进行验证。结果表明, 在一定初始攻角条件下, 初速为100 m/s的射弹, 4.3 s内速度衰减至65 m/s, 并趋于稳定; 弹道水平射程达到660 m, 射高突破37 m; 弹体俯仰角在4 s内由12°变化为–7°, 俯仰角速度3 s内有5°~ –8°的波动, 弹道倾角从初始10°变化为–12°, 攻角由5°变化为–6°, 这些参数均发生显著变化, 需在水下弹道优化设计中充分考虑。该方法可为新一代水下反蛙人预置武器弹道设计提供参考。
水下反蛙人火箭弹; 弹道仿真; 水下发射试验
0 引言
随着世界安全形势的复杂多变, 水面、水下袭击事件日益增多, 抵御敌方蛙人突袭变得愈来愈困难。而近海港口蛙人防御体系的缺失将大大增加港口遭受恐怖袭击的几率, 因此, 近海港口水域立体安全防御已成为各国海军关注的焦点。
水下蛙人部队是水下特种作战的重要组成部分, 具有隐蔽性高、机动能力强和“非对称战略”的优越性, 可执行海上侦察、岛礁港口破袭、反恐等特种作战任务。为了有效防御近海港口敌方蛙人的侵袭, 各国相继研发了反蛙人武器系统, 如水面反蛙人武器系统CS/LK-4、DP-65、CS/AR1 55 mm火箭炮等; 水下反蛙人枪械装备, 如QBS 06、P-11、СПП-1М及APS等。为了有效打击敌方蛙人, 一种新型水下预置火箭武器系统应运而生, 该武器系统搭载于水下无人作战平台, 基于平台火控系统, 自动进行目标识别、火力跟踪、平滑滤波、弹道解算、火力瞄准和智能发射, 实现对敌方蛙人的毁灭性打击。水下弹道特性是该武器系统的关键技术之一, 由于水下环境的特殊性, 受流体阻力、海水密度、温度、压强分布、扰流及弹体初始姿态等多种因素影响, 航行器弹道特性发生显著变化, 严重影响着武器系统的射击精度。
近年来, 水下弹道特性尤其是水弹道建模与仿真已成为各国学者研究的热点[1-5]。此外, 徐健等[6]基于Ls-Dyna软件建立了弹-水耦合模型并进行了仿真; 黄闯[7]开展了跨声速超空泡射弹在全弹道运动过程中的流场数值仿真; 张学伟[8]对水下超空泡射弹弹道特性进行了研究; Jiang等[9]开展了不同入水角和通气量条件下有约束姿态的弹丸入水实验研究; 孟庆操等[10]对不同入水角的反蛙人杀伤弹弹道进行了数值仿真; 龚铂淳等[11]建立了抛射情况下的水下火箭弹弹道数学模型。文献[14-16]研究了水下航行器弹道轨迹跟踪与控制方法。近年来, 水下弹高速入水及弹道稳定性研究越来越受到各国海军的重视[17-21]。
已有研究对水下航行器流体动力学、弹道建模、入水冲击、发射气水相互作用及传热传质过程等进行了探讨, 并对水下弹弹道模型进行了一定程度的简化, 如考虑纵平面下的弹道运动方程研究, 弹丸高速入水问题研究等, 但是尚未见到针对水下反蛙人预置火箭弹研究的报道。鉴于此, 文中通过建立水下预置火箭弹动力学运动模型, 基于VC++自主编程, 对六自由度(弹体质心在空间3个轴方向的移动及绕三轴的转动)弹道特性进行仿真分析, 以期为新一代水下反蛙人预置武器弹道设计提供参考。
1 动力学弹道模型
针对现有反蛙人武器系统水下速度低、射程近、威力有限等缺陷, 基于水反应纳米金属燃料高速推进反蛙人火箭弹, 采用水下预置发射方式, 可实现对敌方蛙人远程打击、超高速攻击及高效毁伤, 可有效对抗敌方蛙人的侵扰。为深入探索其水下弹道航行特性, 以某型水下反蛙人火箭弹为研究对象, 建立水动力学弹道运动模型, 基于VC++语言自主编程, 对水下火箭弹六自由度弹道航行特性进行仿真。
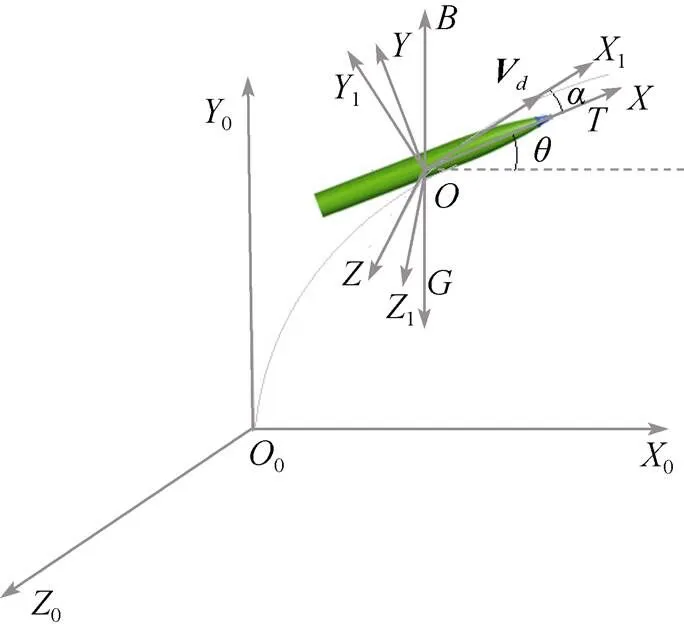
图1 弹体质心直角坐标系
水下火箭弹弹体运动方程是描述弹体在水中的运动规律, 基于解水动力学弹道微分方程组可得水下火箭弹弹道轨迹及航行姿势态, 即任意时刻弹体质心处的坐标、速度、角速度、弹道倾角、弹道偏角和弹道倾斜角等变化规律。弹道动力学微分方程组为[10]
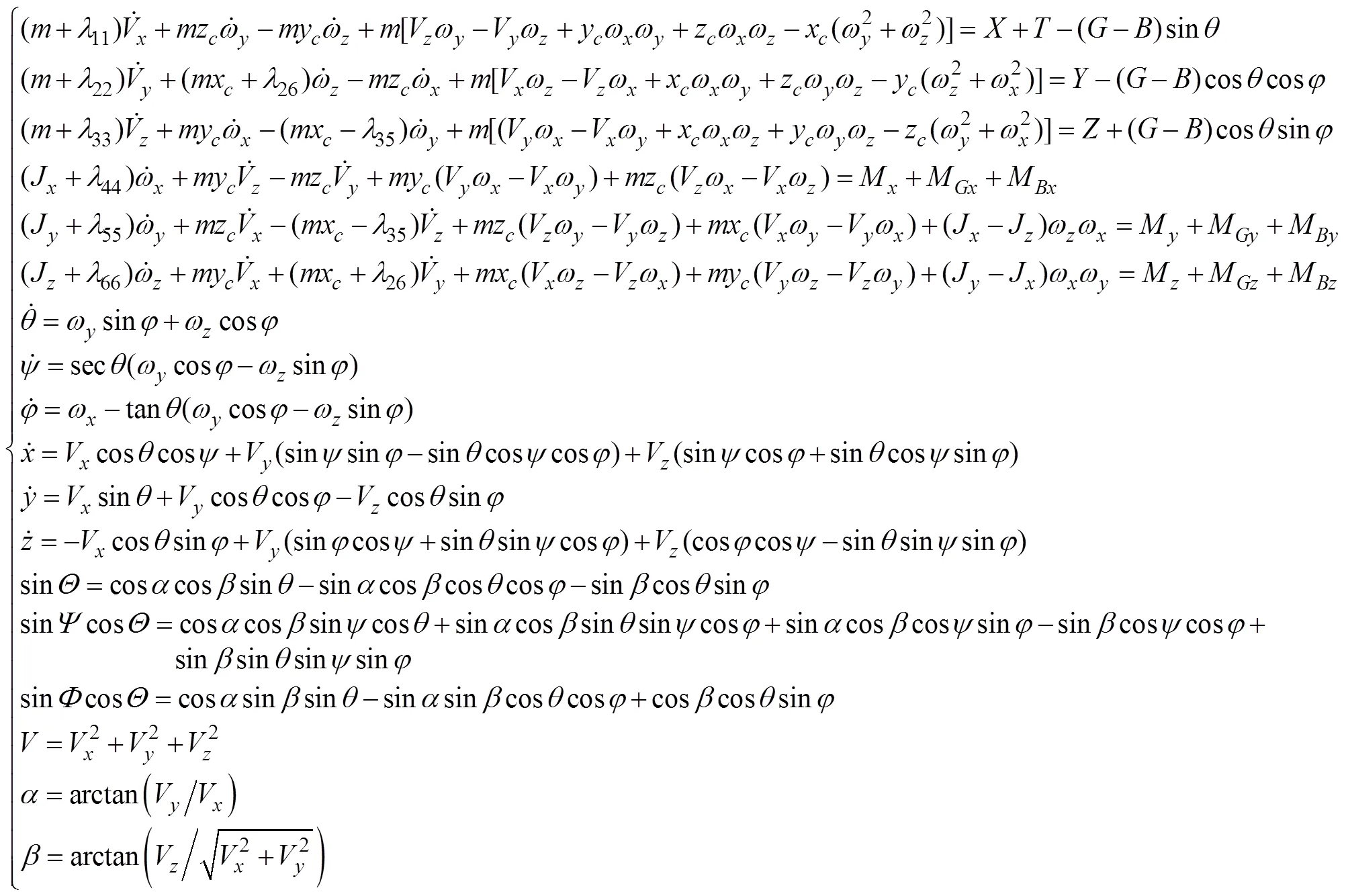
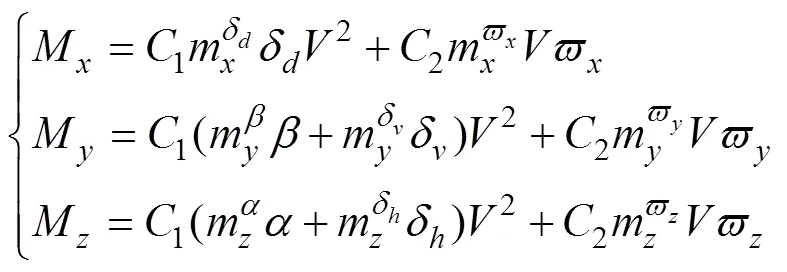
流体动力矩分量
2 弹道仿真与分析
反蛙人火箭弹由水下预置平台发射, 火控系统接收传感器发送的目标数据及预置平台信息, 基于水动力学弹道方程和VC++编程, 通过4阶龙格-库塔法精确解算出水下弹弹道诸元。
2.1 初始条件
2.2 水动力学弹道仿真
水下火箭弹由水下预置平台发射, 出管后由水反应金属燃料发动机高速推进, 外弹道计算从弹体出炮口算起, 以一定初速和射角发射, 火箭弹弹道运动特性仿真如图2~图11所示。
图2和图3给出了水下火箭弹三维弹道、弹道水平距离及射高的变化趋势。结果表明, 水下弹道最大水平距离达660 m, 最大射高37 m, 在轴方向上偏移量很小, 不超过0.006 m。
图2 三维弹道轨迹图
图3 纵平面弹道变化曲线
Fig. 3 Trajectory variation curve in longitudinal plane
图4和图5给出了弹体坐标系下速度变化趋势, 由于水中阻力为空气中的800倍, 弹体水平方向速度V在4 s内由初始速度100 m/s迅速衰减到67 m/s后趋于稳定, 垂直速度V和轴速度V变化较小, 航行时间在4.3 s内, 弹体巡航速度稳定为65 m/s。
图4 火箭弹水平距离与水平速度变化曲线

图5 火箭弹弹体垂直速度与Z轴速度变化曲线

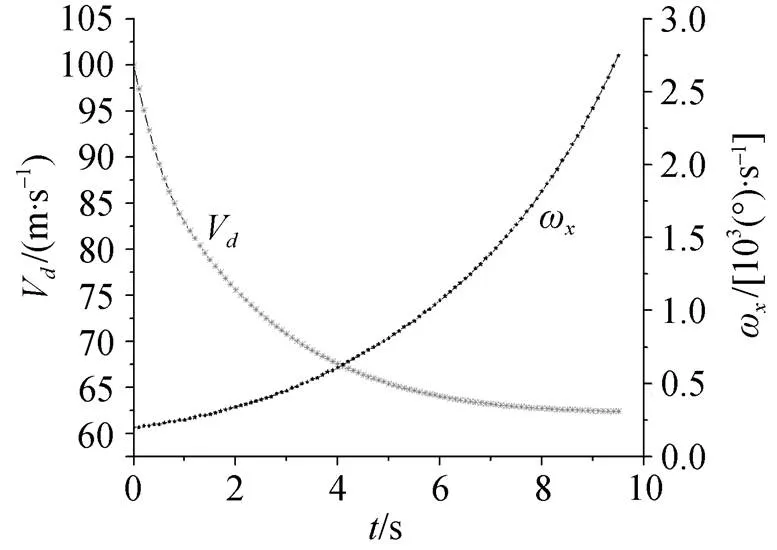
图6 火箭弹弹道速度与横滚角速度变化曲线
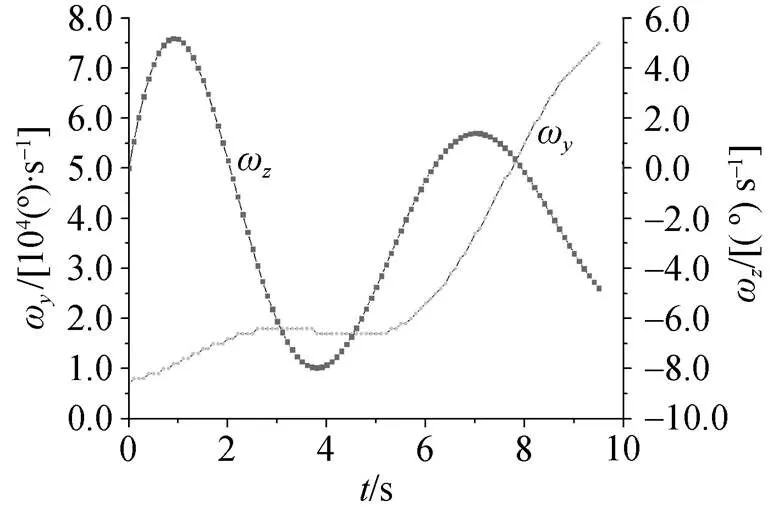
图7 火箭弹偏航角速度与俯仰角速度变化曲线

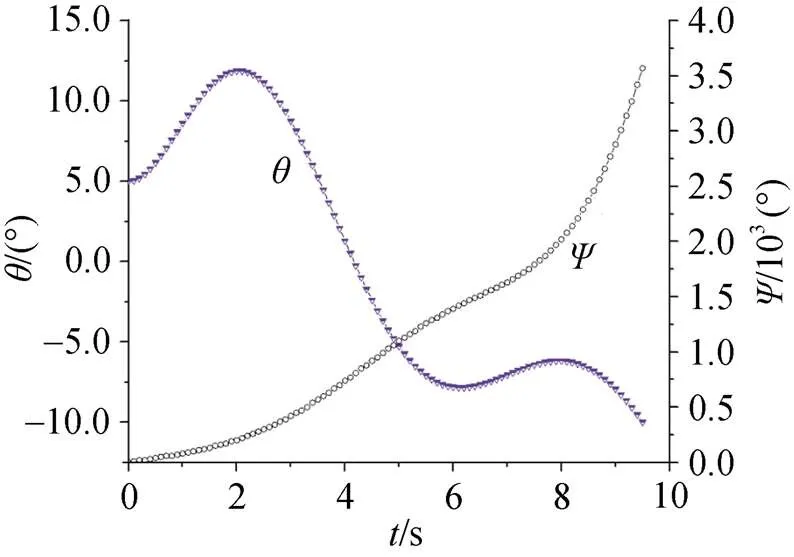
图8 火箭弹俯仰角与偏航角变化曲线
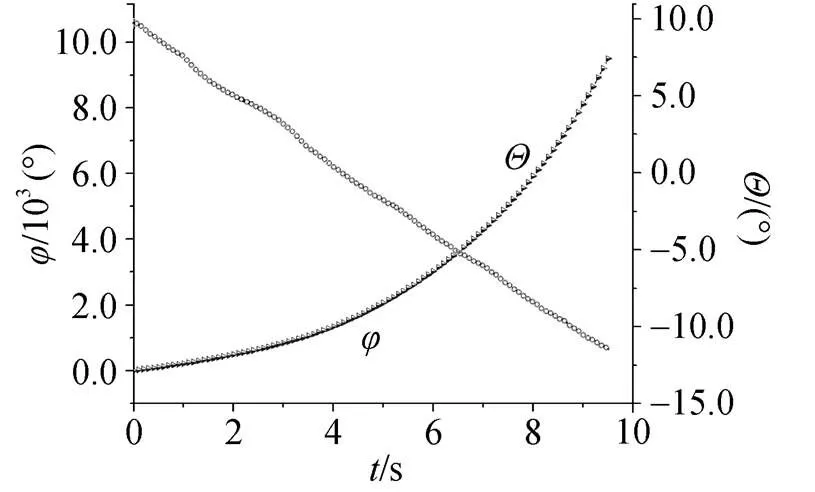
图9 火箭弹横滚角与弹道倾角变化曲线
Fig. 9 Roll angle and trajectory inclination angle cur- ves of rocket
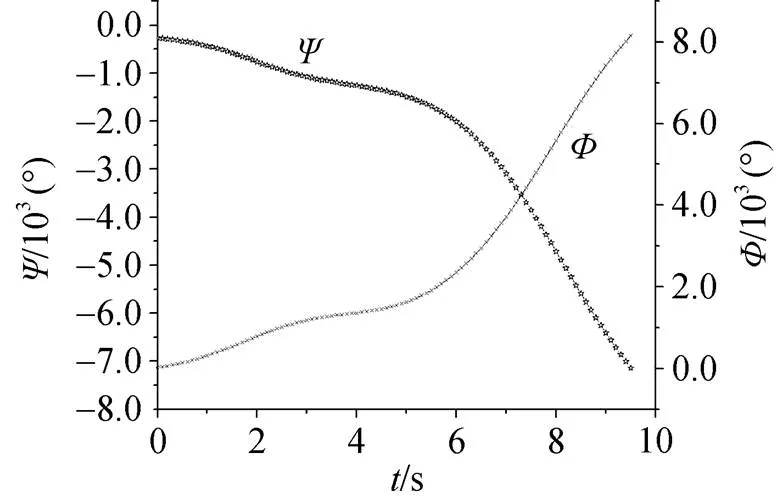
图10 火箭弹弹道偏角与倾斜角变化曲线
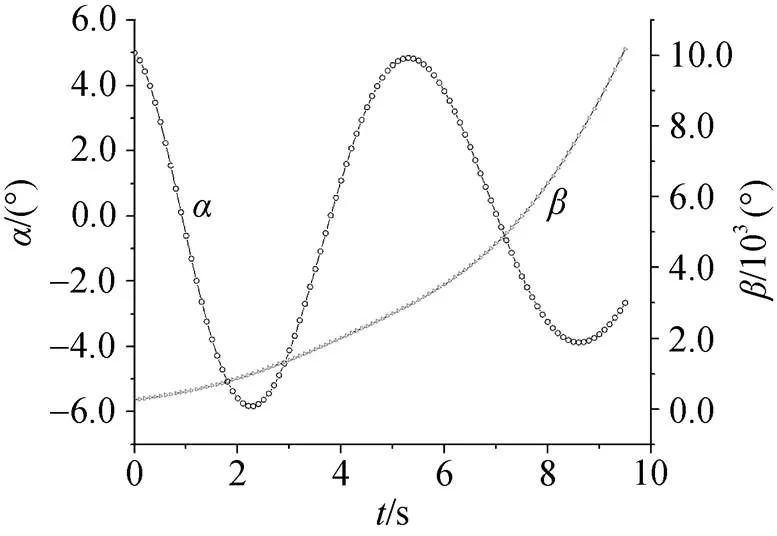
图11 火箭弹攻角与侧滑角变化曲线
图12为水下火箭弹发射试验图, 图12(a)为水面俯视图, 图12(b)为水下航行试验图。受试验条件限制, 火箭弹发射试验在水池中进行, 水池长120 m, 宽1.2 m, 深7 m, 初始速度100 m/s, 航行时间约为1.3 s, 弹道轨迹基本为直线。从图12(a)可知, 在航行末端出现大量水花, 这是由于受试验条件限制, 弹道只有120 m, 末端由挡板保护, 火箭弹撞击至挡板上所产生的水花及空泡。从图12(b)可知, 弹体在航行过程中, 空泡包覆状态良好, 从而达到很好的减阻作用, 试验结果表明, 水下火箭弹弹道具有很好的航行稳定性。

图12 水下火箭弹发射试验
Fig. 12 Launching test of underwater rocket
3 结束语
为深入探讨水下预置火箭弹弹道特性, 建立了水下火箭弹六自由度动力学弹道方程, 基于4阶-龙格库塔法与VC++自主编程, 进行了水下弹道数值仿真, 获得了水下弹三维弹道轨迹、速度变化趋势、弹体姿态角变化、角速度变化率及弹道参数(包括弹道倾角、倾斜角、偏角、攻角和侧滑角)等变化规律, 基于试验的方法, 对弹道稳定性进行验证。结果表明, 由于受复杂水动力因素的影响, 弹体速度衰减显著, 初始速度为100 m/s且最终稳定在65 m/s左右; 弹体俯仰角在4 s内由12°变化为–7°; 俯仰角速度在3 s内有5°~ –8°的波动; 弹道倾角从初始10°变化为–12°; 攻角由5°变化为–6°。下一步将进行复杂扰流情况下水下火箭弹弹道稳定性的研究。
[1] 宋海龙. 水弹道建模与仿真方法研究[D]. 哈尔滨: 哈尔滨工业大学, 2014: 1-19.
[2] 邬明. 考虑空泡的空投航行器入水弹道研究[J]. 四川兵工学报, 2015, 36(3): 23-27.
Wu Ming. Research on Water Entry and Underwater Tr- ajectory of an Airborne Vehicle with Consideration of Ca- vity[J]. Journal of Sichuan Ordnance, 2015, 36(3): 23-27.
[3] Chen C, Cao W, Wang C, et al. Trajectory Simulation for Underwater Vehicle with Power-launched [J]. Journal of Harbin Institute of Technology, 2016, 23(1): 17-22.
[4] Ye H, Zhou H, Wang X. Modeling and Simulation on the Underwater Trajectory of Non-powered Vehicle Disch- arged from the Broadside[J]. Journal of Harbin Institute of Technology, 2016, 23(2): 79-86.
[5] Zhou L, Yu Y. Study on Interaction Characteristics Bet- ween Multi-gas Jets and Water During the Underwater Launching Process[J]. Experimental Thermal and Fluid Science, 2017, 83: 200-206.
[6] 徐健, 杨臻, 李强. 基于Ls-Dyna软件的水下弹的外弹道仿真[J]. 火力与指挥控制, 2016, 41(3): 5-7.
Xu Jian, Yang Zhen, Li Qiang. Simulation for Submarine Bullet’s Exterior Ballistic Based on Dyna[J]. Fire and Command Control, 2016, 41(3): 5-7.
[7] 黄闯. 跨声速超空泡射弹的弹道特性研究[D]. 西安: 西北工业大学, 2017: 67-94.
[8] 张学伟. 水下超空泡射弹运动仿真与弹道特性分析[D]. 太原: 中北大学, 2017: 18-25.
[9] Jiang Y, Bai T, Gao Y, et al. Water Entry of a Constraint Posture Body Under Different Entry Angles and Ven- tilation Rates[J]. Ocean Engineering, 2018, 153: 53-59.
[10] 孟庆操, 杨光. 反蛙人杀伤弹水中弹道模型与仿真[J]. 火力与指挥控制, 2018, 43(5): 117-120.
Meng Qing-cao, Yang Guang. Research on Underwater Ballistic Model and Simulation of Anti-frogman Frag- mentation Bomb[J]. Fire and Command Control, 2018, 43(5): 117-120.
[11] 龚铂淳, 马少杰, 魏健. 水下单兵火箭弹弹道计算[J]. 兵器装备工程学报, 2018, 39(11): 44-48.
Gong Bo-chun, Ma Shao-jie, Wei Jian. Ballistic Cal- culation of Underwater Individual Rocket[J]. Journal of Ordnance Equipment Engineering, 2018, 39(11): 44-48.
[12] Degtiar V G, Pegov V I, Moshkin I Y, et al. Mathematical Modeling of the Processes of Heat and Mass Transfer of Hot Gas Jets with Fluid During Underwater Rocket Laun- ches[J]. High Temperature, 2019, 57(5): 707-711.
[13] Zhang X, Yu Y, Zhou L. Numerical Study on the Mul- tiphase Flow Characteristics of Gas Curtain Launch for Underwater Gun[J]. International Journal of Heat and Ma- ss Transfer, 2019, 134: 250-261.
[14] Kumar N, Rani M. An Efficient Hybrid Approach for Tra- jectory Tracking Control of Autonomous Underwater Ve- hicles[J]. Applied Ocean Research, 2020, 95: 102053.
[15] Guerrero J, Torres J, Creuze V. Adaptive Disturbance Ob- server for Trajectory Tracking Control of Underwater Ve- hicles[J]. Ocean Engineering, 2020, 200: 107080.
[16] Xie T, Li Y, Jiang Y, et al. Back-stepping Active Dis- turbance Rejection Control for Trajectory Tracking of Un- der-actuated Autonomous Underwater Vehicles with Po- sition Error Constraint[J]. International Journal of Adv- anced Robotic Systems, 2020, 3: 1-12.
[17] Chen C, Yuan X, Liu X, et al. Experimental and Num- erical Study on the Oblique Water Entry Impact of a Ca- vitating Vehicle with a Disk Cavitator[J]. International Journal of Naval Architecture and Ocean Engineering, 2019, 11(1): 482-494.
[18] Chen T, Huang W, Zhang W, et al. Experimental Inves- tigation on Trajectory Stability of High-speed Water Entry Projectiles[J]. Ocean Engineering, 2019, 175: 16-24.
[19] 侯宇, 黄振贵, 郭则庆, 等. 超空泡射弹小入水角高速斜入水试验研究[J]. 兵工学报, 2020, 41(2): 332-341.
Hou Yu, Huang Zhen-gui, Guo Ze-qin, et al. Experimental Investigation on Shallow-angle Oblique Water-entry of a High-speed Supercavitating Projectile[J]. ACTA Armame- ntarii, 2020, 41(2): 332-341.
[20] 杨继锋, 马亮, 刘丙杰, 等. 空化条件下潜射航行体水弹道修正方法研究[J]. 弹箭与制导学报, 2020, 40(3): 27-30, 34.
Yang Ji-feng, Ma Liang, Liu Bing-jie, et al. Research on Water Trajectory Correction Method of Submarine Laun- ched Vehicle Based on Cavitation Conditions[J]. Journal of Projectiles, Rockets, Missiles and Guidance, 2020, 40 (3): 27-30, 34.
[21] 张代国, 潘菲菲, 张晓乐. 自旋前伸空化回转体高速斜人水稳定性仿真研究[J]. 数字海洋与水下攻防, 2020, 3(1): 40-45.
Zhang Dai-guo, Pan Fei-fei, Zhang Xiao-le. Stability Si- mulation on High-speed Water Entry with Certain Angle of Self-spin Forward-extended Cavitating Body[J]. Digital Ocean & Underwater Warfare, 2020, 3(1): 40-45.
Six-Degree-of-Freedom Ballistic Simulation of Underwater Anti-Frogman Rocket
WANG Jin-yun1, WANG Meng-jun1, ZHOU Hui-jie2
(1. Hebei Key Laboratory of Dual Medium Power Technology, Handan 056017, China; College of Science and Tech- nology, Ningbo University, Ningbo 315212, China)
As a new type of preset weapon for coastal port defense, underwater rockets have the advantages of high speed, high lethality, and convenient use, which can effectively resist the invasion of the enemy frogman. To deeply explore its underwater ballistic-navigation characteristics, taking a certain type of underwater rocket as the research object, a hydrodynamic ballistic motion model was established, and the six-degree-of-freedom ballistic-navigation characteristics of the underwater rocket were simulated based on VC++ language self-programming, and its navigation stability was verified through of the underwater launch test. The results show that the rocket with an initial velocity of 100 m/s decreases to 65 m/s within 4.3 s and tends to be stable under a certain initial angle of attack, the ballistic horizontal range reaches 660 m, and the rocket height breaks through 37 m, the pitching angle of the rocket changes from 12° to -7° within 4s, the pitching angular velocity fluctuates from 5° to -8° in 3 s, the angle of attack changes from 5° to -6°, the trajectory tilt angle changes from initial -10° to -12°. This study can provide a reference for the ballistic design of a new generation of underwater anti-frogman preset weapons.
underwater anti-frogman rocket; ballistic simulation; underwater launch test
TJ630; TJ012.3
A
2096-3920(2021)03-0313-07
10.11993/j.issn.2096-3920.2021.03.010
王金云, 王孟军, 周晖杰. 水下反蛙人火箭弹六自由度弹道仿真[J]. 水下无人系统学报, 2021, 29(3): 313-319.
2020-06-20;
2020-07-30.
王金云(1978-), 男, 博士, 研究员, 主要研究方向为水下弹道建模与仿真.
(责任编辑: 杨力军)
