基于多旋翼无人机的输配电线路故障精确测距研究
2021-07-11孙嫱张志林林财徳林雅云王霖露
孙嫱,张志林,林财徳,林雅云,王霖露
(国网福建省电力有限公司漳州供电公司,福建漳州 363000)
输配电线路的安全可靠性影响着用户的用电质量[1],因此,保证其正常运行、及时解决输配电线路故障问题对于电力输送具有重大意义[2]。
输配电线路输电方式多为小电流电路接电方式,线路故障特征并不明显,分布式电源连接以及分支输电线路数量庞杂致使输配电线路结构更加复杂,而由于线路测量方式的局限性,对于线路故障精确测距方面的问题仍需加大解决力度,目前的输电线路巡查一般以人工及直升机巡查的方式进行,可以在电路输电过程中完成数据的精确测量,但易受天气因素的影响,无法保证数据的测量结果,甚至影响到自身工作状态,加之输配电线路的结构复杂性以及线路电容极小性,容易导致电路电流产生不平衡的状况,造成混乱电流磁场,进一步加大了电流故障的检测难度与检测数量,增添测距的干扰因素[3]。传统输配电线路故障测距研究虽在一定程度上提升了测距的精准性,但无法保证测距电流的稳定性,且投入的成本较高、测距效率较低。针对上述问题,文中提出一种新式基于多旋翼无人机的输配电线路故障精确测距研究,对以上问题进行解决。
文中首先对输配电线路进行图像视频数据的获取,利用多旋翼无人机紫外相机收集输配电线路的图像数据,并将获取的数据记录,在成像的基础上完成分析,进一步对线路故障进行算法确认,通过模拟优化粒子群算法选取数据的优化解,最终利用μPMU相量信息对输配电线路进行精准测距,将相角相等作为约束条件,完成对输配电线路的故障精准测距研究[4]。该研究在一定程度上减少了干扰因素的影响,提升了测距的精准程度,具有更好的可发展性。
1 输配电线路图像视频数据获取
由于输配电线路的结构较为复杂,为此,需对其进行初步的图像获取操作,利用紫外相机拍摄线路图像,根据其两翼载荷系统的两轴增稳云台以及双通道图像紫外检测仪对图像进行进一步的获取,采用相机内部机械结构与编码器之间的紧密配合系统对图像分解,同时安装陀螺数据敏感装置,以此来稳定多旋翼无人机的飞行系统,以保证拍摄图像的清晰度,进一步稳定输配电线路的输电回路,使云台在摇摆及振动的状态下依旧保持自身稳定,进而输出稳定清晰的线路图像[5]。将云台控制器外部的接口与内部系统接口相连接,并经过飞行控制系统进行传送交流,同时保证对数据的安全接收,利用对陀螺信息的采集进一步提升对电机位置的闭环增稳控制,准确采集电晕放电现象信息,同时对紫外可见影像进行成像收集,将经过系统处理后的成像与可见光分析图像进行叠加操作,明确线路图像的精准位置,加大对电晕电路的强度处理,提高对电力设备的状态检测力度,保证输配电线路的自身安全性,利用双通道紫外成像设备加强监管操作,稳定紫外相机拍摄路径,同时加强对紫外相机零件选型的管理力度,在达到轻量化设计的基础上提升传感器配置标准[6-8]。其双通道紫外成像设备组成如图1 所示。

图1 双通道紫外成像设备组成
通过实时串口装置对系统工作状态进行数据反馈操作,并屏蔽产生的其他光源干扰信息,将可见光数据视频分解,利用收集到的紫外光与可见分离光的具体信息分析线路图像存在的故障可能发生点,并进一步执行后续操作[9-10]。
2 输配电线路故障确认算法设计
在经过对输配电线路故障图像的获取后,进一步对其故障进行算法确认。在变电站内部安装行波检测仪器,由于输配电线路由多条分支线路构成,为此需仔细分析每条线路的安装条件,并找出主线路对其进行集中处理安装,减少不必要的安装浪费,并利用点状分布的方式进行安装分布,便于后续对故障点的查找与分析[11-13]。
在行波检测起初,需对优化目标进行确定,进而保证在线路产生故障时可以同时整合多条支路信息进行故障位置分析,及时准确查找故障位置[14]。同时对寻找优化问题进行定位,利用较少的检测装置对线路进行追踪定位,同时设置优化约束条件作为输配电线路之间的拓扑结构来源,进一步将线路进行整体分层,提升故障确认的清晰率,加强优化的信息结构。
在分层的过程中进一步确认行波检测装置的点式分布状态,定位故障的标准状态,合理分配输配电线路总体电网结构[15],寻找主源节点,将经过的最短路径中的节点标记出来,并优化布点条件,线路故障获取算法确认:
1)将算法的测量电阻温度初始化,设置稳定的退火速度,将算法的惯性常数与加速度进行集中确认,并生成常数数值。
2)利用预先设定的优化目标对适应度数值进行判定。
3)将设定的粒子数值与测量的实际极值进行比较,并分析最佳优化数值,获取经过更新后的粒子数值。
4)进一步更新粒子的位置与速度同时统一粒子速度。
5)计算更新后的粒子适应度数值。
6)更新适应度的变化量,在接收到新的粒子位置数值后,降温并返回原始系统。
3 输配电线路故障精确测距
在实际参数测量中,由于线路的特殊性,将对测量结果产生一定影响,需进一步对线路状态进行保护与检查,文中构建辐射状的输配电线路模型进行研究,其模型如图2 所示。

图2 输配电线路仿真模型图
对不同的线路进行选型与长度研究,从中挑选出最适宜的测量长度,同时考虑线路间的耦合状况,进行相位平衡检测,进行对角线元素对比分析,在线路运行正常的状态下对运行范围与故障点范围进行查找,选取电阻误差值[16],加大误差处理,充分利用相量信息减少误差率,进而提升故障测距的精准率。利用双端测距与双端信息之间的条件关系对故障距离进行确定,在故障收敛点附近降低电压负荷数值,并适当考虑相角关系,及时检查测距时的系统状态,随时为其补充保护装置,利用相角与辐射角的精确数据增强相位的条件约束,将其固定到一定的范围内,对线路降压方面进行进一步的加强训练,并结合线路阻抗[17],加强数据理论分析,缩减理论误差,强化线性元素之间的抗阻性,并对线路运行过程中进行欧姆定律条件约束,由于故障状态下的首末端电流通过量不同,为此,利用线路两端的μPMU 对电流相量进行测量,准确完成数据的检测收集,将目标函数设置为凸函数,并将函数进行复合操作,降低其重复耦合率,对故障前后的数据测量条件进行固定,最终完成对输配电线路的故障精确测距研究[18]。
4 实验与研究
4.1 实验目的
为了检测文中基于多旋翼无人机的输配电线路故障精确测距研究的结果,与传统输配电线路故障精确测距研究进行对比,并分析实验结果。
4.2 实验模型构建
针对输配电线路的结构复杂性以及故障查找困难性,对其进行故障精确测距研究,并构建基于多旋翼无人机的输配电线路故障精确测距模型,如图3所示。
图3 输配电线路故障精确测距模型
根据上述输配电线路故障精准测距模型,进行实验参数的设定,如表1 所示。

表1 实验参数表
4.3 实验结果与分析
根据上述输配电线路故障精确测距模型进行实验对比,将文中基于多旋翼无人机的输配电线路故障精确测距研究的效果与传统输配电线路故障精确测距研究的效果进行比较,得到的故障检测时间对比图与测距准确率对比图如图4、5 所示。
1)故障检测时间对比图
由图4 可知,在相同的参数条件下,文中研究方法的输配电线路故障检测所用时间较短,而传统研究方法的输配电线路故障检测所用时间较长,造成此种差异的主要原因在于文中对输配电线路进行图像数据的收集,利用紫外成像的原理提升数据查找力度,根据可见光的切换实现对多旋翼无人机的飞行控制,进一步完善图像的采集方式,提升图像收集的数量与清晰度,并从中寻找到有利数据实现对图像的研究与分析,增强故障图像信号的接收速率,进而减少检测故障检测所需时间。
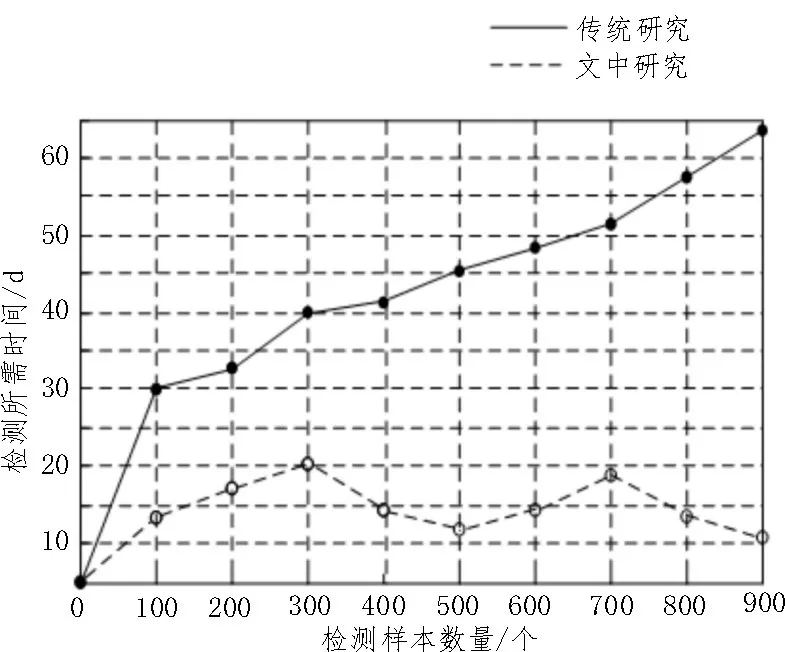
图4 故障检测时间对比图
2)测距准确率对比图
由图5 可知,在实验时间为5 d 时,文中研究的测距准确率为88%,传统研究的测距准确率为41%,在实验时间为10 d 时,文中研究的测距准确率为92%,传统研究的测距准确率为51%。由于文中对输配电线路进行了算法确认,在一定程度上保护了线路自身系统的安全,以寻找最优解的方式加强了测距的严谨性,进一步提升测距的数据准确性与科学性,将线路进行分层操作,按照层级寻找最佳操作方式,提高测距的准确率。

图5 测距准确率对比图
在以后的实验中,随着实验时间的不断增加,文中研究的测距准确率不断提升,且一直位于传统研究之上。除以上原因外,文中利用双相位相量对故障进行精准分析,根据双端阻抗法提升研究的力度,完善测距步骤,提升研究的测距准确率。
经过以上对比分析可知,文中基于多旋翼无人机的输配电线路故障精确测距研究的故障图像信号接收效果及测距准确率均优于传统研究,在较高程度上提升了系统的测距能力,降低了研究成本,提高了测距效率,进一步保护了自身系统,能够更好地为使用者服务。
5 结束语
文中在传统研究方法的基础上提出了一种新式基于多旋翼无人机的输配电线路故障精确测距研究,该研究的效果明显优于传统研究。
文中对输配电线路的测距研究分为3 个较为清晰的步骤:首先将输配电线路的图像数据进行系统收集,利用紫外成像仪对图像进行记录操作,并分析获取图像的具体线路信息,在了解信息的基础上进一步提升对线路故障的确认能力,利用模拟退火粒子群算法,将线路故障系统最优解进行合理计算与分解,并将所得结果进行最终实验研究,通过μPMU相量加大对线路的测距力度,提升测距的结果精准性,完成整体输配电线路精准测距研究。
相较于传统研究方法,文中研究方法在较高程度上提高了测距系统的测距准确性,减少无关因素的干扰,进一步完善了输配电线路的电流平衡性,有利于后续研究的开展,具备更加广阔的发展市场。
