基于光电技术的气磁悬浮电机位姿检测方法
2021-07-08竺志大寇海江
竺志大,唐 率,曾 励,寇海江,戴 敏,杨 坚,张 帆
(扬州大学机械工程学院,江苏 扬州 225127)
气磁悬浮电机是一种新型电机,以气磁轴承代替传统轴承,实现转子系统在悬浮过程中的旋转运动,具有速度快、可调性好等优点,可广泛应用于航空航天、汽车工业等领域.电机位姿检测是电机研究的热点[1-2],一般分为接触型和非接触型两类,接触式检测的典型结构由滑轨支架和旋转编码器组成,检测原理简单,检测精度较高,但会产生摩擦阻力并限制偏转范围;非接触检测的典型方法是利用光学类传感器采集转子表面特征,分析转子位姿信息,但其算法复杂,检测精度较低[3-4].因此,研究电机的精准偏转位置已成为亟待解决的问题[5-7].刘文韬[8]和朱忠捷[9]采用一种新型光电检测装置对球形电机进行了位姿检测,检测结果满足位姿检测精度要求,误差控制在0.9%左右.本文拟分析气磁悬浮电机结构和硅光电池检测装置的工作原理,验证检测方式的可行性,改进电机位姿光电检测方法,以期为气磁悬浮电机研究奠定基础.
1 气磁悬浮电机结构与工作原理
图1为气磁悬浮电机结构示意图.气磁悬浮电机主要包括径向气磁轴承、轴向气磁轴承、电机及光电检测装置等.气磁轴承将电磁轴承与气体轴承相结合,以气体轴承为主要承载,电磁轴承为辅助调节,充分发挥两种轴承的优势.图2为气磁轴承工作原理.轴向气磁轴承与径向气磁轴承工作原理相同,气体轴承部分由外界压缩气体通过调压阀、过滤器等进入轴承气体腔室,由于多孔质材料(考虑导磁性,采用铁氧体烧结材料)本身相当于无数个小节流器,气体经过节流器产生一定的压力降进入轴承与转子之间,然后向外流动到轴承边界降为大气压,轴承与转子之间形成一层具有承载能力的气膜,将转子悬浮支承;电磁轴承由电磁线圈产生的电磁力控制,电磁力大小由传感器实时位置检测反馈,通过差动控制调节电流大小,以此实现反馈调节控制.

图1 电机结构示意图Fig.1 Schematic diagram of the motor structure

图2 气磁轴承工作原理Fig.2 Working principle diagram of gas magnetic bearing
2 检测原理
2.1 硅光电池
硅光电池具有光生伏特效应,光照下会产生电动势,当外接电流时,会有短路电流经过,短路电流Iis=k·Φ=k·E·S,其中k为比例系数,与硅光电池灵敏性有关;Φ为电池光通量;E为光照度;S为受光面积.假设硅光电池初始受光面积饱和,当转子发生偏转位移时,会导致光斑面积减小,E随距离变化而产生的变化可忽略不计,若面积与偏转位移量l为唯一确定关系,则可推出位移量.
2.2 检测装置
光电检测装置分为轴向检测装置和径向检测装置,如图3所示.检测装置包括环形光带和硅光电池阵列.环形光源由均布发光二极管和环形透镜组成,可模拟平行光,安装在转子结构上;硅光电池阵列由多个硅光电池串联而成,布置在定子中,转子带动环形光源发生偏转,导致不同区域硅光电池阵列光斑面积发生变化.轴向与径向光电检测装置的工作原理一致.轴向检测装置硅光电池阵列轴向分区,与环形光源轴向长度一致,通过计算光斑面积,判断转子在z轴方向的偏移量;径向检测装置硅光电池阵列径向分区,与环形光源内外径之差一致,计算各区光斑面积,确定转子在x轴和y轴方向的偏移量.图3(c)为径向硅光电池阵列图.假设硅光电池是单位为1的正方形,在内、外径分别为r和R的圆环上布置N个相同的硅光电池,光斑面积SG与圆环面积SH的误差ε=1-SG/SH=1-N[R2-(R2-1)2]-1π-1=1-N(2R-1)-1π-1,其中N/(2R-1)≤3,误差小于0.2%.

图3 光电检测装置Fig.3 Photoelectric detection device
2.3 位姿检测算法
研究气磁悬浮电机转子系统的径向偏转位移,首先对环形硅光电池进行分区,根据各区光斑面积排序,确定转子系统的偏移区域;然后计算各区面积,确定控制不同区域的电流大小,以此进行反馈控制.
2.3.1 偏移方向判断
由转子偏移控制器中的位置传感器提供转子位置信息[10-12],同时引入区域系数K,便于实现电流控制.硅光电池区域分布情况如图4所示.定子固定的硅光环分为四个区域,每个区域及坐标轴四个方向各对应一个区域系数,用于反馈气磁轴承的电流参数.

图4 硅光电池区域分布图Fig.4 Regional distribution of silicon photovoltaic cells
当转子系统未发生偏转时,硅光电池环处于饱和状态,各硅光电池阵列均为满载,输出最大电流,随后进行控制器处理,使磁悬浮轴承各极电流处于零偏置电流I0;当转子发生偏转位移时,各硅光电池阵列光斑面积势必减少,而不同偏转位移及方向会导致不同区域的光斑面积变化不同,因此可通过比较光斑面积大小判定转子系统的位移方向.
光照强度不变,当转子系统向区域4发生偏转e时,区域4的通光量始终大于区域2,各区光斑面积如图5所示,其中S1~S4为环形光斑面积.由图5可知,S1和S3明显大于S4和S2,结合公式S=Φ/E,知S4在偏移过程中始终大于S2,由此可确定偏转方向.

图5 光斑面积示意图Fig.5 Schematic diagram of the spot area
表1为转子偏转的8种情况.当转子沿x,y轴方向发生偏转时,以偏移方向为对称轴,两区面积相等,比较沿轴偏移方向两区面积即可确定偏转方向;当转子向某一象限发生偏转时,必然有两个区域光斑面积较大,通过电流大小比较剩下两个区域光斑面积即可确定偏转方向,具体操作流程如图6所示.

表1 偏转区域表Tab.1 Deflection area table
2.3.2 位移计算
3 位姿检测试验
3.1 试验平台搭建
为了验证光电检测技术的可行性,以额定转速为3 000 r·min-1的Y80M1-2电机进行试验(根据国际标准,振幅不超过50 μm).将环形硅光电池固定在转子输出轴并嵌入凹槽,采用环形透镜实现光射平行,将发光二极管固定在外设架上,确保整个试验装置处于黑暗状态,位姿检测试验平台如图7所示.
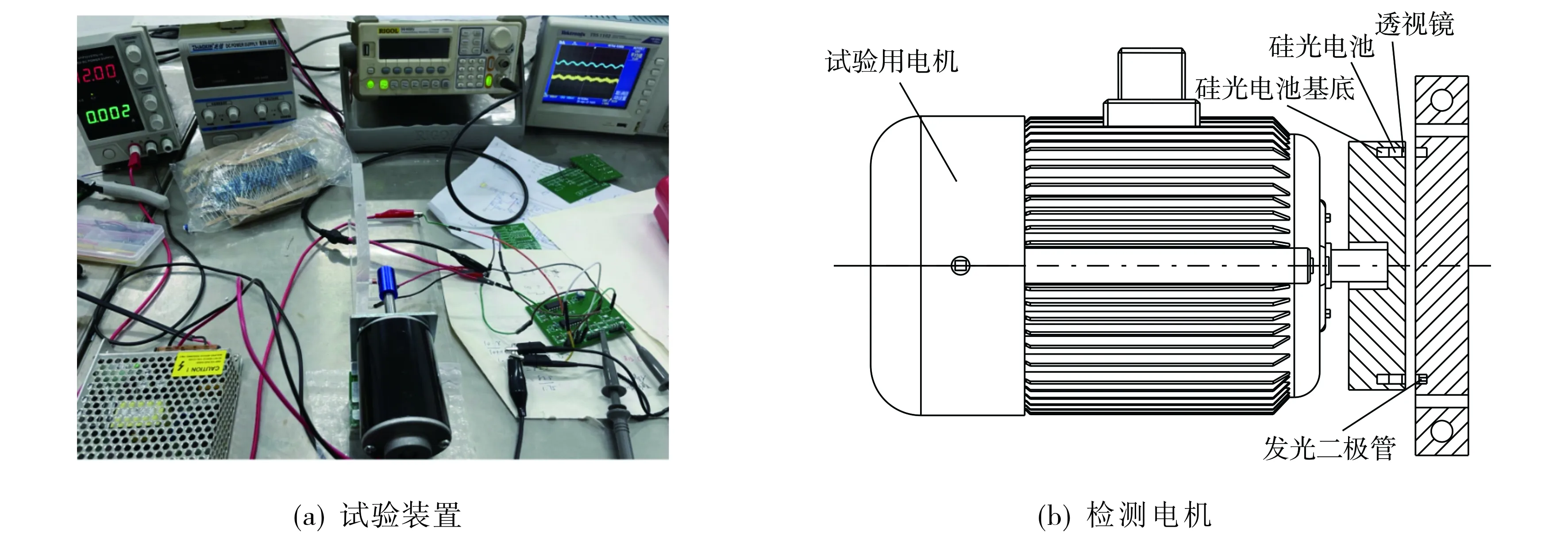
图7 位姿检测试验平台Fig.7 Pose detection test platform
试验选用BPW硅光电池,光源为光谱较长的白光LED.基于DSP(digital signal processor)技术设计检测装置硬件模块,利用TM320F28335数字信号处理器,对信号进行调理、去噪、模数转换等一系列处理,将处理后的数字信号输入DSP,运用MATLAB编译位姿计算程序,对数字信号运算后进行数模转换并反馈,以此控制气磁轴承,试验将采集的模型信号作为输出.试验主要参数:光谱响应度为430~1 100 nm,响应度为0.32 A·W-1,响应时间为100 ns,暗电流为30 nA,电容为25 pF,工作温度为-40~100 ℃.
3.2 试验结果分析
考虑到转子自身重力的影响,试验采集转子沿负y轴方向和区域4的偏转量,结果如图8所示.由图8可知,转子沿y轴负方向的偏转幅值较小,在区域4的偏转呈上下波动,振幅均在-50~50 μm之间,符合国际标准.因此,本文提出的基于光学测量技术的气磁悬浮电机位姿检测方法能够准确检测电子转子系统偏转量,对气磁电机中的偏转信号检测具有一定的参考价值,为后续的理论和实践奠定了基础.
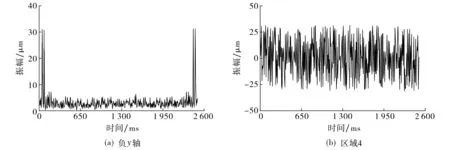
图8 转子偏转幅值Fig.8 Rotor deflection amplitude
