离散时间T-S动态故障树在民用飞机辅助动力装置系统安全性评估中的应用研究
2021-07-08陶文操
陶文操 王 栋
(上海飞机设计研究院,上海 201210)
0 引言
故障树分析(Fault Tree Analysis)作为一种故障分析手段,揭示了各个失效事件与其所能导致的上层事件失效状态的关系[1]。传统故障树分析已经广泛应用于复杂系统的安全性与可靠性分析[2-3]。但是对于各个事件之间的交互关系,例如事件的先后发生顺序、动态冗余关系、功能相关性等,都无法在传统故障树中被分析到[4]。基于以上缺陷,动态故障树应运而生并有效解决了传统故障树中失效时序相关、功能冗余等问题。
辅助动力装置(APU)是安装于飞机上的、用于提供辅助动力源的、自成体系的小型发动机[5],其安全性和可靠性指标对全机指标的贡献度较高。在民用飞机APU系统安全性评估过程中,也逐步将动态故障树分析应用于安全性定量分析中[6],用于更精确地反映事件失效的动态关系。不同于传统故障树可以应用布尔运算求解,动态故障树的求解有赖于开发新的算法。目前对于动态故障树求解办法的研究非常丰富,包括马尔可夫链法[7]、动态贝叶斯网络法[8]、蒙特卡洛仿真法[9]和多值决策图法[10]等。
本文采用了离散时间T-S动态故障树分析方法[11],对民用飞机辅助动力装置(APU)系统故障树分析中的一段子树进行分析,并与马尔可夫链分析的方法进行对比,以确认离散时间T-S动态故障树法在辅助动力装置系统安全性分析过程中的有效性和精确度,对APU系统的研制和适航取证工作起到积极作用。
1 离散时间T-S动态故障树分析
动态故障树是指将动态门引入静态故障树结构而产生的能够表征系统动态特性的故障树[5]。动态门包括“优先与门(PAND)”、“功能相关门(FDEP)”、“顺序相关门(SEQ)”、“冷备件门(CSP)”、“温备件门(WSP)”、“热备件门(HSP)”、“延时门(TD)”等,如图1所示,对于各个动态门的解释可参考文献[12]。
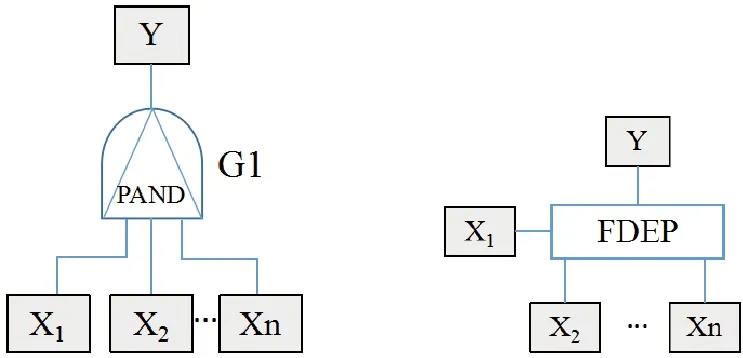
a)优先与门 b)功能相关门
离散时间T-S动态故障树则将连续的任务时间分割为有限的小段,再根据每个事件在各个时间小段的发生情况建立“离散时间T-S动态门规则”,最后依据每一条规则进行计算求得上级事件的失效率。

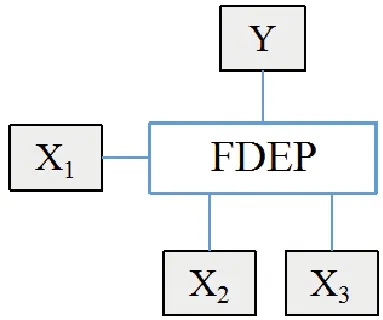
图2 功能相关门
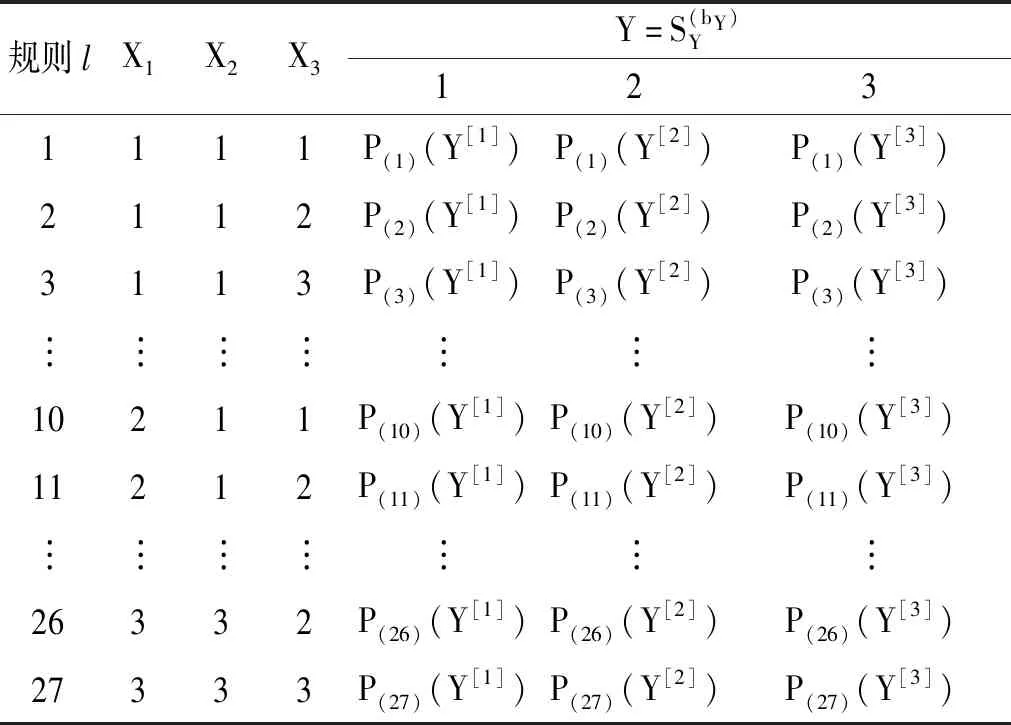
表1 离散时间T-S动态门规则(功能相关门)
2 离散时间T-S动态故障树计算
对于每一条离散时间T-S规则l,对应的执行可能性为:
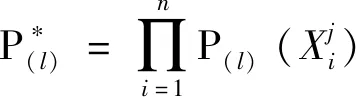
(1)
(2)

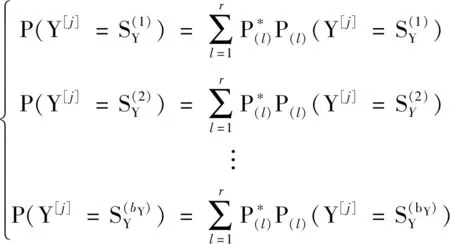
(3)

3 离散时间T-S动态故障树在辅助动力装置系统中的应用
辅助动力装置(APU)是一台安装于飞机上的、为飞机提供辅助动力源的燃气涡轮发动机。而安全性评估过程是安全性需求捕获、分配、确认、设计、实现和验证的过程,贯穿整个APU系统的研制过程。传统故障树作为安全性定量分析的重要手段已经被应用于APU系统安全性工作。但是APU系统中存在着功能冗余、时序相关等场景无法用传统故障树精确表达,例如APU系统具有两个通道的超速保护机制,超速保护功能失效具有功能冗余性。因此引入动态故障树表现APU系统动态特性无论是对APU系统的研制还是对适航取证工作都能起到积极作用。
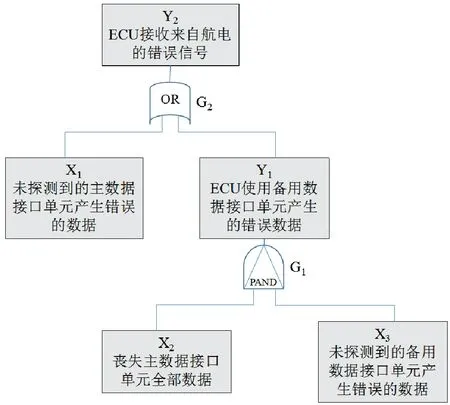
图3 APU丧失停车功能的一段子树
APU系统故障树分析中常有动态门与静态门组合的情况,如图3所示。该故障树为“APU丧失停车功能”故障树中的一段子树。其中G1为优先与门,当“APU丧失主数据接口单元全部数据”先于“未探测到的备用数据接口单元产生错误的数据”发生或同时发生时才会导致上级事件“ECU使用备份数据接口单元产生的错误数据”发生。这是由于ECU优先使用来自主数据接口单元传输的数据,只有当主数据接口单元失效时才会采用备用数据接口单元传输的数据。G2为或门,当“未探测到的主数据接口单元产生错误的数据”或“ECU接收来自航电的错误信号”发生时顶事件发生。底事件X1、X2、X3的失效率如表2所示,任务时间按照中型客机单次平均飞行时间t=3 h计算。
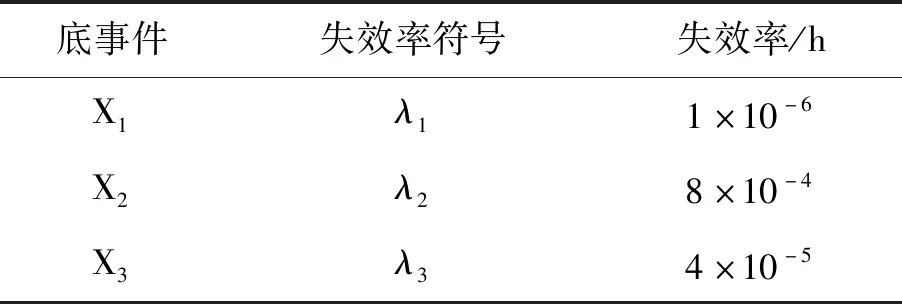
表2 底事件失效率
3.1 采用马尔可夫链方法求解
采用马尔可夫链方法可以求得动态故障树的解析解。根据图3故障树分析失效路径,可以获得马尔可夫状态转移图,如图4所示。其中的指代关系见表3所示。
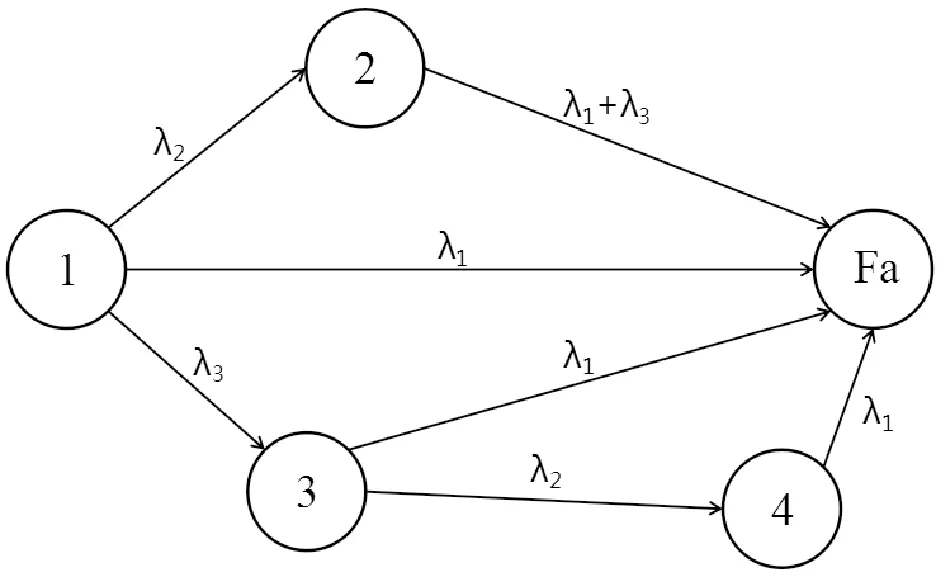
图4 马尔可夫状态转移图
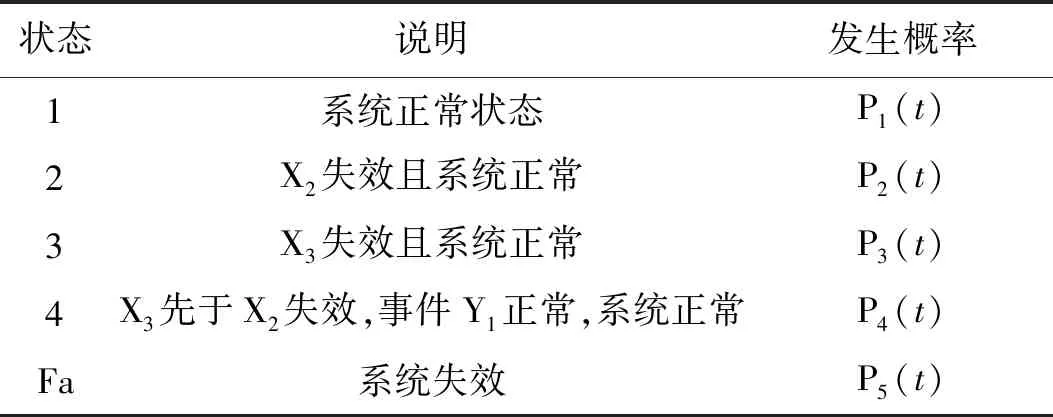
表3 马尔可夫链状态指代表
由马尔可夫状态转移图可得到状态转移速率矩阵T如下:
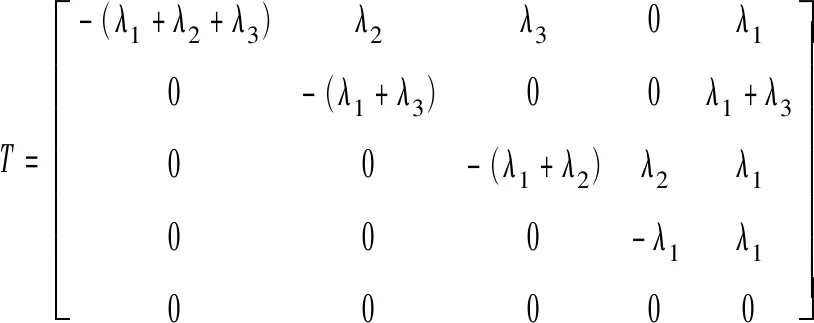
(4)
状态转移速率矩阵中第i行,第j列表示由状态i向状态j转移的速率,其中i,j为自然数,且i,j∈[1,5]。当i=j时,由于状态向外转移,因此转移速率为负。由此列出马尔可夫链微分方程如下:
(5)
代入马尔可夫状态速率转移矩阵T得:
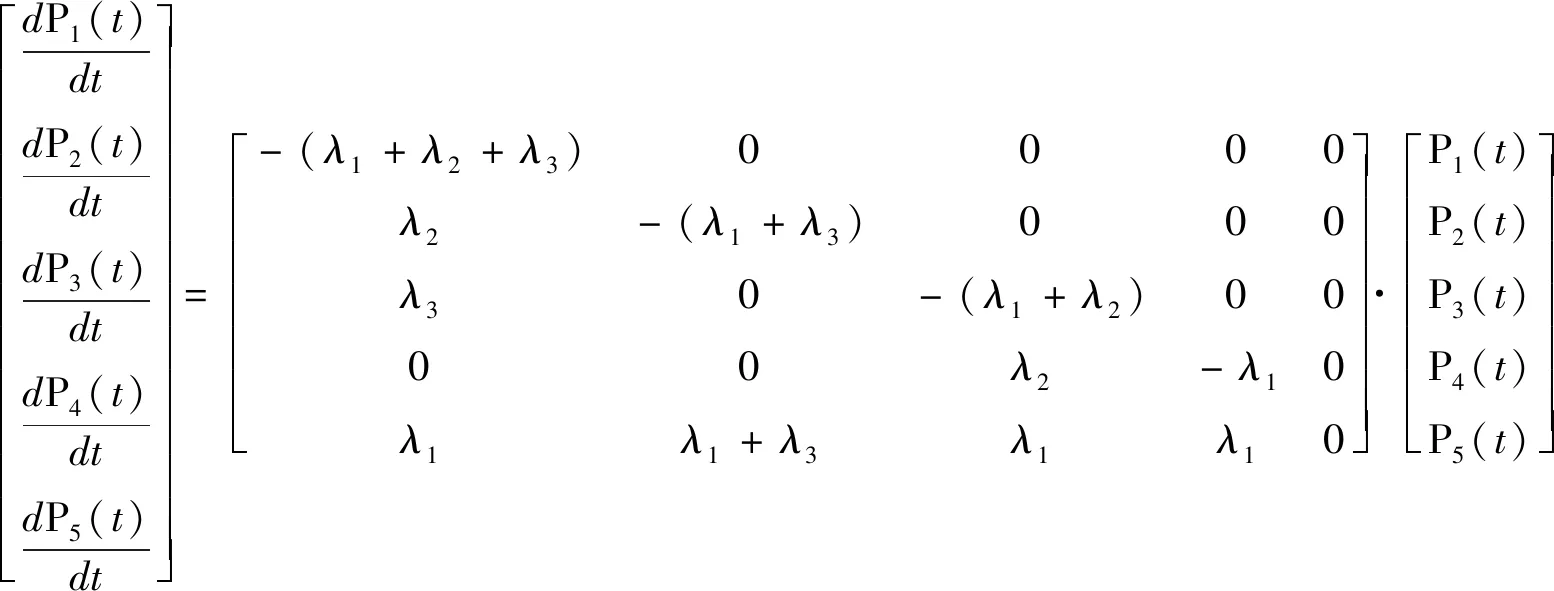
(6)
P1(t)=e-(λ1+λ2+λ3)t
P2(t)=e-(λ1+λ3)t-e-(λ1+λ2+λ3)t
P3(t)=e-(λ1+λ2)t-e-(λ1+λ2+λ3)t
(7)
将失效率λ1~λ3和任务时间t=3h分别代入,可得顶事件的失效率P5(t=3)=3.143 87×10-6
3.2 采用T-S动态故障树方法分析
将任务时间划分为m=2、3、5、10、20、30、50、100段,则每段任务时间的长度Δ=T/m。此处以m=2为例,其他任务分段数的计算方法类似。当m=2时,Δ=1.5 h,任务时间段为[0,1.5 h]、(1.5 h,3 h]和(3 h,)。中间事件Y1和顶事件Y2的发生情况如表4和表5所示。
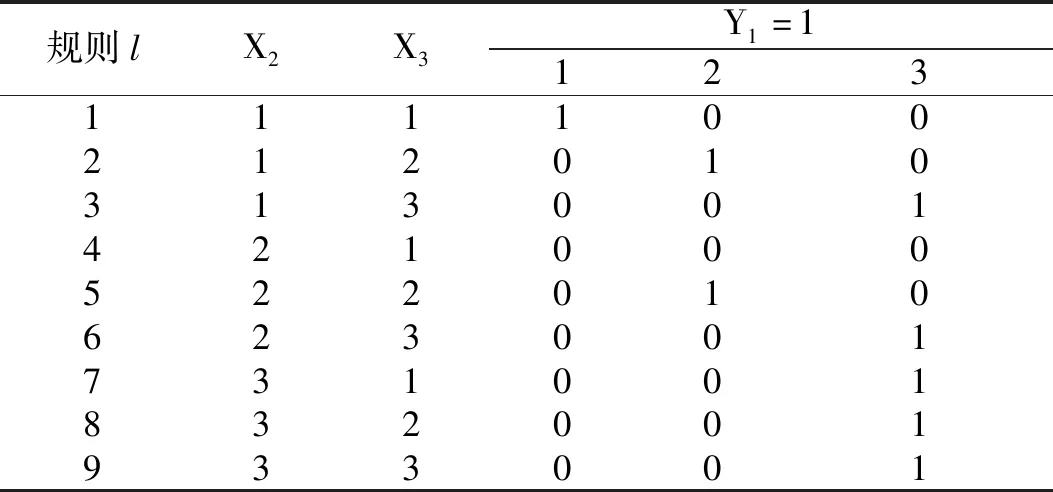
表4 优先与门G1发生规则
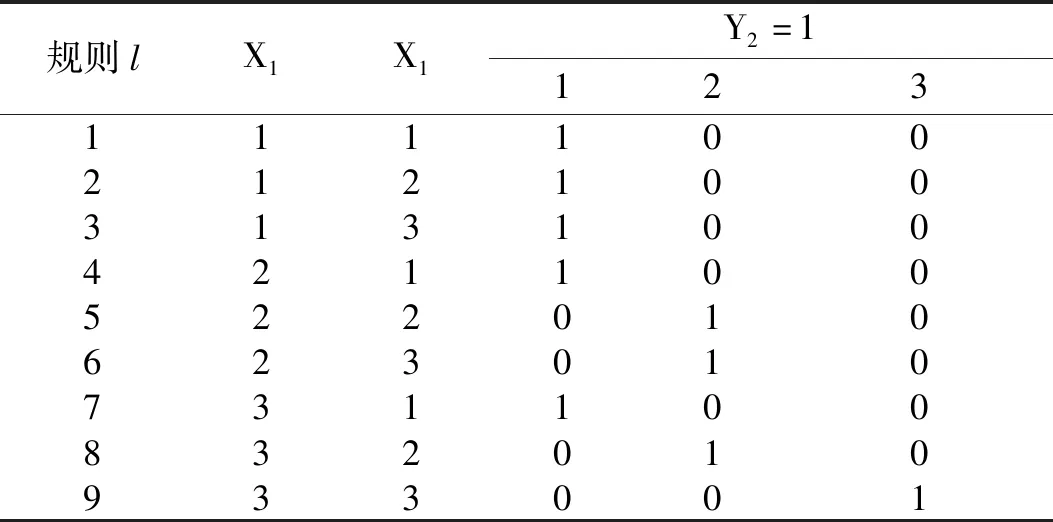
表5 或门G2发生规则
在建立T-S发生规则之后,按照公式(1)~(3)计算顶事件Y2的失效率,得到的离散时间T-S动态故障树求解结果如表6所示。可以看出随着任务时间分段数的增加,T-S动态故障树的求解结果越来越逼近利用马尔可夫链求得的解析解,相对误差逐渐缩小,证实了离散时间T-S动态故障树分析方法的可行性。同时相比马尔可夫链等状态空间模型方法,T-S动态故障树法采用数值计算方法,显著降低了计算成本。
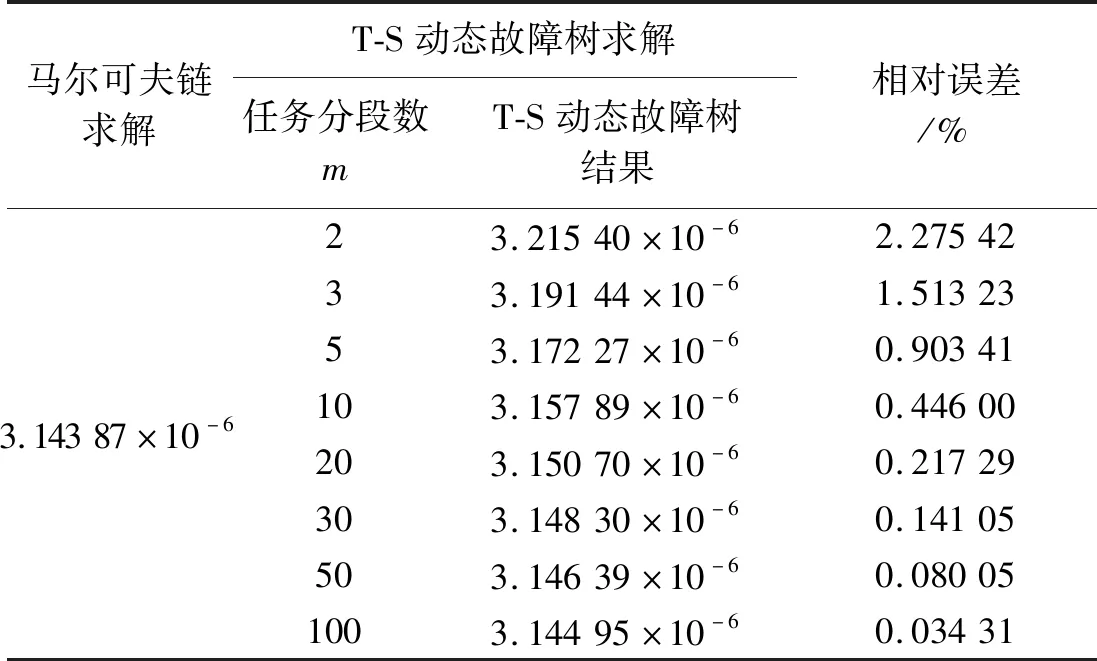
表6 动态故障树求解结果
4 结论
研究离散时间T-S动态故障树在民用飞机辅助动力装置(APU)系统中的应用,本文采用上述计算方法,计算了APU系统故障树分析中的一段子树的顶事件的失效率,并与使用马尔可夫模型计算的结果进行比较,得到的结论如下:
1)随着任务时间划分段数的增加,离散时间T-S动态故障树分析方法求解的结果与马尔可夫链求解的结果相对误差逐渐减小。当任务时间分段数大于5时,相对误差小于1%,计算精度可接受;
2)相比于状态空间模型方法,离散时间T-S动态故障树采用数值计算方法,在保证计算精度的前提下显著降低计算成本,在工程领域具有应用价值。
