GPS坐标时间序列周期性分析
2021-07-07许焕盛
许焕盛
(广东省地质局第二地质大队,广东 汕头 515000)
山东省于2007年启动了山东省卫星定位连续运行综合应用服务系统(Shan Dong Continuously Operating Reference Station,SDCORS)项目,积累的观测数据不断丰富,为研究区域形变、地球板块运动和地球自转等提供重要的数据支撑[1]。研究GPS坐标时间序列的非线性变化,可获得基准站的位置变化及三维速度场,为工程应用基准站的选择、基准站的速度及数据分析提供参考[2-3]。相关研究表明:GPS坐标时间序列不仅具有线性变化趋势,还具有年、半年周期等的非线性变化特征,其中以U方向表征的最为明显[4-9]。本文以12个SDCORS站连续4年的观测序列为研究对象,计算坐标时间序列的功率谱,通过功率谱图分析其周期项,并将周期项特征进行统计,这对于分析基准站的稳定性及位置变化具有重要意义。
1 数据处理策略
1.1 数据预处理
选取的各基准站的基本信息如表1所示。连续均匀的坐标时间序列是数据分析的基础,因此在数据分析之前需对数据进行预处理,包括剔除孤立值与插值、阶跃项改正、趋势项拟合及去除趋势项等步骤。
表1 站点基本信息
1.1.1 孤立值的剔除与数据补全
由于外界观测条件、多路径效应及传输信号干扰等因素的影响,坐标时间序列中不可避免含有孤立值,也称粗差,这些粗差的存在会造成数据分析结果的偏差。因此,在数据进行周期分析和求站点速度之前,应将其剔除。GPS坐标时间序列由于基站的改造、观测条件不充分等干扰因素,导致在某天或某段时间出现部分数据缺失或不完整的现象,且在剔除粗差的步骤中,部分点被剔除,需要将这两部分的数据进行拟合补齐。
本文采用3倍中误差为判别原则,简称“3S”方法,探测坐标时间序列中的粗差,并将其剔除[9]。“3S”基本原理如下:

(1)
则认为Sa为粗差,需将其从观测序列中剔除。通常采用迭代的方法剔除坐标时间序列含有的粗差。
对于缺失和剔除粗差的数据,经过多次实验与分析,采用三次多项式插值的方法对数据进行补全,保证数据的连续性和完整性,为后续的研究和分析奠定基础。
1.1.2 阶跃项的修正
由于接收机故障、天线更换、地震等原因,GPS坐标时间序列在某时段出现阶跃或称中断,会导致测站速度估计有偏,需要对其进行修正。具体做法是从坐标突变的位置开始,往后的坐标时间序列统一加上阶跃值进行修正。由于sdrc基准站U方向的坐标时间序列中含有明显的坐标阶跃,本文就以sdrc为例对阶跃项的修正作以说明。图1所示为sdrc站U方向的原始坐标序列,从图可以看出存在两处坐标突变的地方,分别在第307天和第775天。图2所示为sdrc阶跃修正后的坐标时间序列,由图可知,经过阶跃修正后的坐标时间序列在66.42 m附近波动,说明具有良好的连续性与一致性。

图1 sdrc原始坐标时间序列

图2 sdrc阶跃修正后的坐标时间序列
1.1.3 趋势项拟合
在进行谱分析时要求坐标时间序列为零均值,即没有线性趋势项。为此,需要对坐标时间序列进行线性拟合,其原理如下:
yt=β0+β1t+xt
(2)
式中,β0、β1为线性趋势拟合的常数项和一次项系数。利用该模型计算得出各个时间点的拟合值,然后将对应时间点的坐标时间序列值减去拟合值,得到残差时间序列,即
(3)
图3所示为sdrc基准站三个方向经过粗差剔除、数据插值和阶跃修正后的坐标时间序列及线性趋势拟合。由图可知:sdrc站的N、E方向具有明显的线性变化,U方向不仅有线性变化,还表现出周期性变化,因此U方向的运动是十分复杂的;U方向数据的离散程度要比N、E方向大,这主要是因为U方向的精度要低于其它两个方向。在进行功率谱分析时要求数据零均值,因此需要将线性趋势项从坐标时间序列中去除,以满足功率谱分析的条件。图4所示为sdrc去除线性趋势项的坐标时间序列,由图可知:坐标时间序列经过上述步骤处理后,变化量在零的上下进行波动,说明具备了零均值的特性。同时图4的坐标时间序列表现出明显的季节性变化,说明存在一定的周期项,这就需要对坐标时间序列进行功率谱估计,探测潜在的周期。
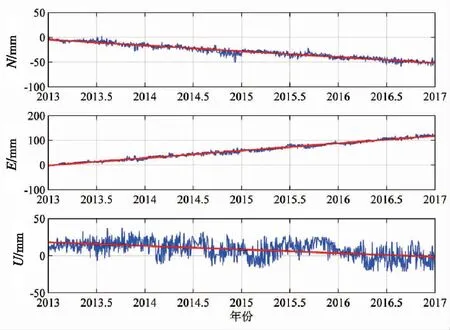
图3 sdrc坐标时间序列及拟合直线

图4 sdrc残差序列
1.2 坐标时间序列的功率谱估计
本文采用传统功率谱估计——直接法,探测坐标时间序列中存在的潜在周期,基本思想为:直接对坐标时间序列作离散傅里叶变换,计算求得坐标时间序列的幅值,然后将幅值的平方除以时间长度作为功率谱密度,得到功率谱密度与周期之间的关系图,也称之为周期图法。周期图的峰值则为坐标时间序列可能存在的周期,且能量越高,对应的周期越明显[10]。其优点是计算简单,而且不依赖于相关函数。基本原理如下:
设x(n)为坐标时间序列,其长度为N的离散傅里叶变换为:
(4)
则功率谱密度定义为式(5):
(5)
2 坐标时间序列周期性分析
坐标时间序列经过数据预处理得到部分基准站3个方向的残差序列及各方向的功率谱图,如图5所示。

图5 残差序列与功率谱图
图5所示(a)(c)(e)(j)为各站的残差序列图,横坐标为年份,纵坐标为各方向的振幅,单位为mm;(b)(d)(f)(h)为各站的功率谱图,横坐标为周期,单位为a,纵坐标为单位周期内的能量,单位为mm2/a。由图5可知:各站点在N方向的能量较小,均小于5×107,说明周期项不明显。其中sdrc站半年周期项能量最大,为4.963×107,说明sdrc站半年周期运动较明显,其他几个站半年周期项的能量差别不大。另外jimo站、sdrc站、rizh站还存在2年的周期项,cash站、jimo站、rizh站可能还存在更长的周期项。E方向上,各站半年周期项对应的能量突出,功率谱处于8~10×107之间,能量值相差不大,说明各站的半年周期项运动在E方向明显。U方向上,各基准站2年周期项的能量最高,其中sdrc站能量最小,为8.565×107,其他三个站的量级为108。
对其它基准站的功率谱图进行分析,统计各基准站的周期项及功率谱如表2所示,表中功率谱采用科学计数法,量级为107。
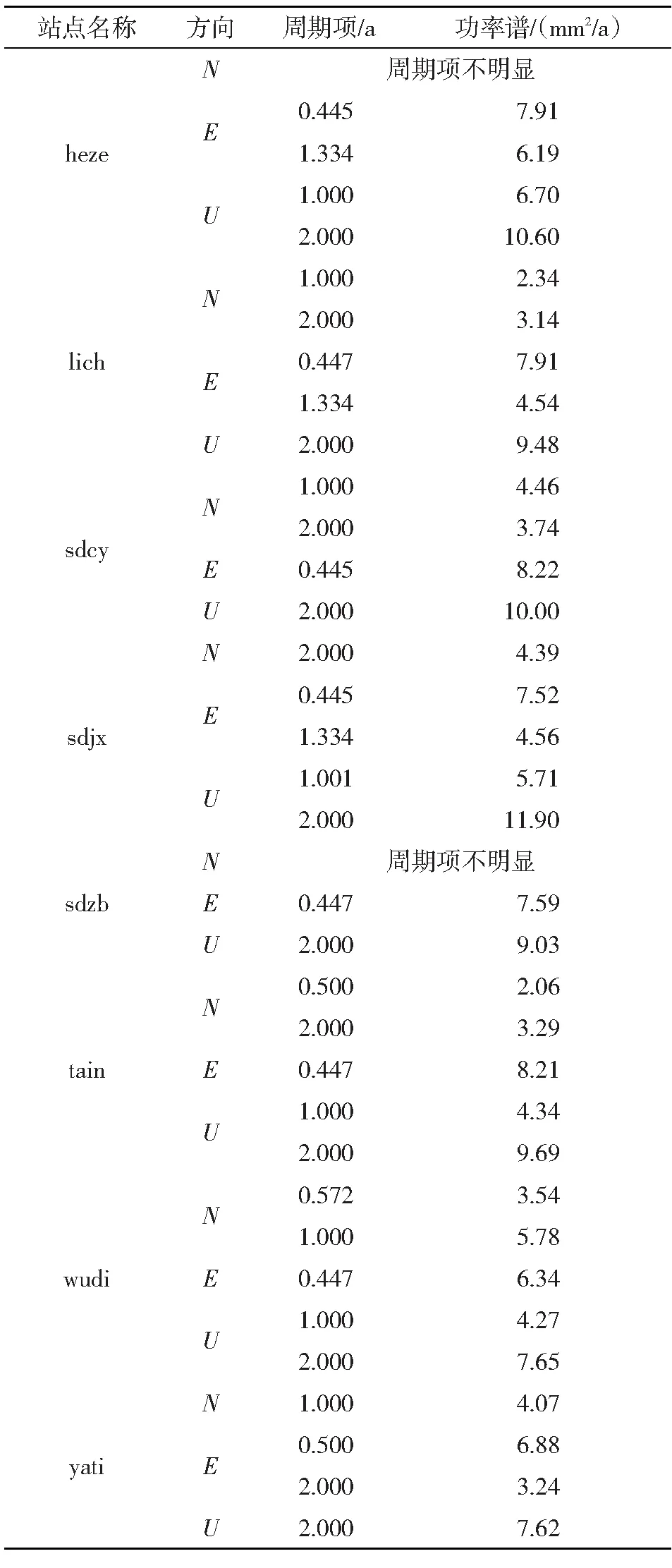
表2 基准站周期项及功率谱
由表2可知:
(1)基准站在N、E、U方向均表现出一定的周期性。N方向的周期运动不明显;E方向主要以0.5年周期项运动最为突出,且能量值差别不大;U方向存在2年周期项,绝大部分基准站存在1年周期项,且2年周期项的能量高于1年周期项的能量,说明U方向的2年周期运动较为明显。
(2)坐标时间序列中并不是严格存在半年周期项和年周期项。从功率谱可以看出,能量最强对应的周期并不是严格的半年周期项、年周期项等周期,而是在周期项的附近,称为类半年周期项、类年周期项等。
(3)坐标时间序列功率谱在E方向的0.5年周期项的能量普遍高于N方向的,说明E方向的0.5年周期性运动比N方向的要明显。
(4)N方向整体周期项不明显,且大多数周期项不明显的基准站具有更长周期项的趋势,具体原因有待分析。
3 结 论
本文对SDCORS站坐标时间序列的周期特征进行了分析与统计,得到:SDCORS站坐标时间序列存在周期项,且N、E方向年、半年周期项明显,U方向2年周期项明显,功率谱能量明显高于其它两个方向,这是由于U方向的影响因素较多。在后续的研究中,将对更长时间跨度的坐标时间序列进行周期特征的研究与分析,探讨周期项的影响因素,为得到精确的噪声模型提供数据基础。
