六自由度机器人运动控制与分析研究
2021-07-05洪伟程韩成浩张译心张师
洪伟程,韩成浩,张译心,张师
(1.吉林建筑大学研究生院,吉林 长春 130000;2.东北电力大学电气工程学院,吉林 吉林 132012)
1 引言
随着中国制造2025的提出与智能变电站的发展,机器人在电力设备巡检、数据分析与处理等方面的作用日益凸显,人们的生产、生活未来也将更需要机器人的参与[1-3]。未来机器人的发展必将辅助中国电网向智能化、现代化建设迈进一大步。六自由度机器人的有序工作,高度依赖于合理的运动方案和高效的运动算法,因此,对六自由度机器人运动进行控制与分析是一项值得研究的工作。
目前,国内外关于六自由度机器人控制方面的研究已经取得了一些成果:文献[4]以六自由度机器人为研究对象,进行运动学分析,设计并优化逆解算法,最后仿真验证了该算法能够正确地得到运动学逆解,关节角度变化曲线平滑连续,为机器人后续的轨迹规划和运动控制研究提供了可靠的依据。文献[5]为了更加精准地控制工业机器人,使其能按照预定轨迹完成规定任务,以典型的六自由度串联机器人为研究对象,对其运动学进行分析和研究。文献[6]为提高并联机器人机构和运动控制设计的效率和准确性,以6-UPU并联机器人为研究对象进行运动仿真分析,验证其结构设计的合理性和控制算法的有效性。文献[7]对六自由度机器人的机械臂进行正向运动学建模,运用解析法进行逆运动学求解,运用蒙特卡罗法分析其工作空间,并验证模型的合理性。
基于以上分析,本文将对六自由度机器人进行运动控制研究,并进行正运动、你运动分析,最后基于机器人定位实验进行有效性验证。
2 六自由度机器人运动控制设计
六自由度机器人运动控制系统主要包括上位PC机、运动控制器、伺服系统和限位报警传感器等部分组成,控制系统图如图1所示[8]。PC机的主要作用是可视化处理与参数计算,让使用者能够实时了解机器人的运动状态。运动控制器由STM32与PC机连接,将接收到的机器人实时运动数据送入寄存器,并由寄存器对信号进行处理与控制。伺服系统可以辅助对机器人进行精确的位置控制。此外,STM32还通过达林顿管将信号传给继电器。

图1 控制系统图
运动控制器硬件采用STM32+FPGA的结构,基于STM32的高速SPI接口扩展W5500以太网控制器,实现运动控制器和PC机的以太网通信。
基于PC机+运动控制器结构组成的机器人控制系统软件设计,可分为 PC 机应用程序软件设计和运动控制器软件设计两部分。其中STM32程序主要包括通信模块程序、数据处理模块程序、初始化参数设置模块程序、电机控制模块程序、通用 I/O 控制模块程序五部分。
3 六自由度机器人运动分析
六自由度机器人D-H坐标系如图2所示。

图2 六自由度D-H坐标系
六自由度机器人位姿变换矩阵可以表示为:
(1)
式中的TA、TB、TC、TD可以表示为:

(2)
(3)
(4)
(5)
式中:θi为连杆转角;αi-1为连杆扭角;di为连杆偏距。
根据式(1)可以得到机器人末端坐标系相对于基坐标系的位姿矩阵,也就是将每一个关节变换矩阵相乘,得到最后结果:
(6)
式中:nx、ny、nz、ox、oy、oz、ax、ay、az、px、py、pz均为关于θi、αi-1和di的函数。
通过采用以上分析可以实现六自由度度机器人的精准定位。
4 六自由度机器人定位实验
采用机器人对三个点进行精确定位实验,每个点实验五次,得到结果如图3~图5所示。

图3 测量点1实验结果
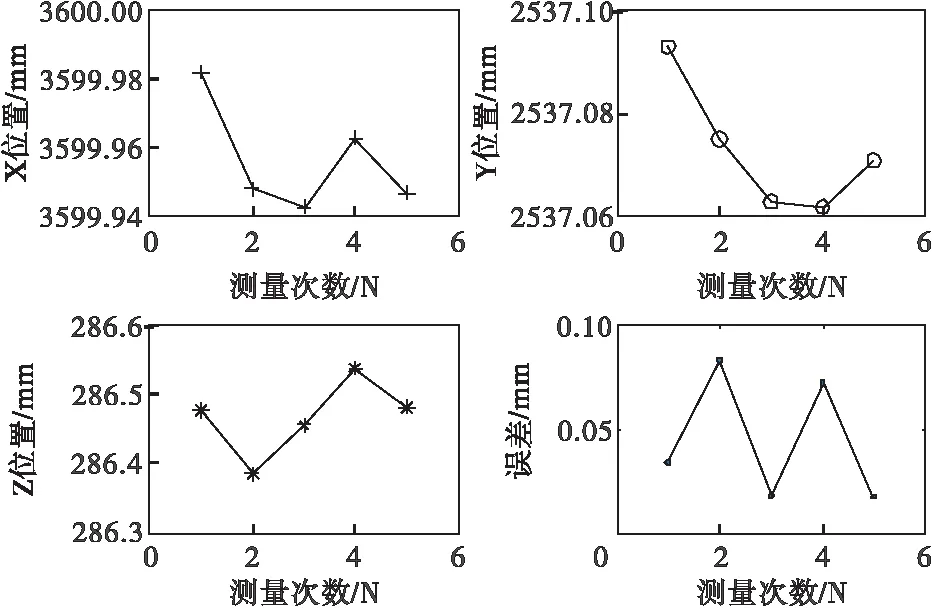
图4 测量点2实验结果
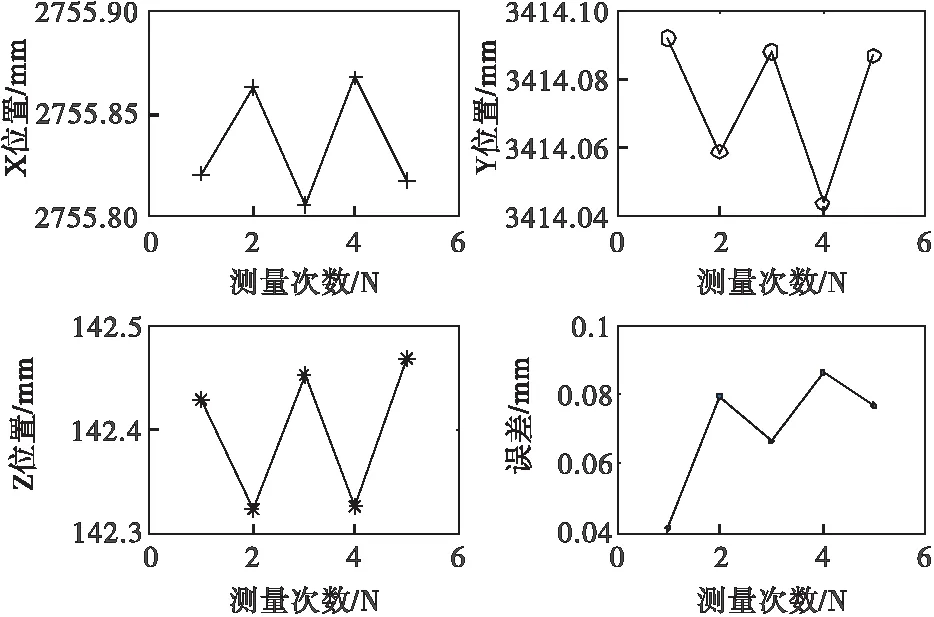
图5 测量点3实验结果
通过对六自由度机器人进行重复定位精度测量实验结果可以看出,六自由度机器人运动控制器设计是有效的,可以使机器人精确定位,误差在0.1mm以内,满足使用要求。
5 结论
本文对六自由度机器人的运动控制系统进行设计,并基于D-H坐标系研究了六自由度机器人的运动控制,并采用重复定位实验验证了机器人运动控制方法的有效性。
