基于四旋翼无人机的输电线路巡检实时自主跟踪系统设计
2021-07-05王博文刘兴东
王博文,刘兴东
(国网湖北省电力有限公司检修公司,湖北 武汉 430064)
1 引言
近年来使用无人机(UAVs)进行输电线路巡检引起了相关领域的高度重视。使用无人机激光雷达或摄像头在输电线路巡检中可以提高检测精度和效率。而在各类无人机中,由于四旋翼直升机独特的无跑道着陆/起飞,盘旋和自由飞行特性,易于携带和轻便性,所以是执行此任务的绝佳工具。
如今已有大量文献关注此问题。文献[1]在一个传输线场景提出了使用激光雷达数据的分类方法。文献[2-4]介绍了输电线路巡检方法,设计与实现了激光雷达传感器硬件。文献[5]使用了激光雷达和立体视觉的组合用于旋翼机无人机障碍物的避免。文献[6]在路径规划提出了避障方法。文献[7]提出使用相机进行检测高传输线高效图像分割方法。文献[8]介绍一种基于计算机视觉的输电线路巡检系统。
输电线路巡检在无人机上使用激光雷达或摄像机已经被广泛研究。然而,四旋翼无人机在输电线路巡检中的一般应用是利用安装在四旋翼无人机本体上的摄像机跟踪预定路径点产生的轨迹,拍摄图像或视频。视频记录的图片只能在任务完成后离线分析,拍摄的视频也被先发送到地面站,再通过使用远程控制器进行避障和轨迹修剪,使其更容易与无人机进行交互。但是这种方法由于高质量的实时视频传输对带宽和电磁场的要求非常高,使得四旋翼无人机在传输线附近的操作非常困难,限制了此类应用的范围。所以需要设计一种高性能的硬件和传输线探测器来实现四旋翼无人机在输电线路巡检时的实时自主跟踪。
2 硬件设计
四旋翼无人机模型如图1所示。配备4个无刷转子,75cm的转子直径,采用22.2V、22000mah两个锂离子电池,提供最大2kg有效载荷,飞行时间60分钟。

图1 四旋翼无人机模型
为了将无人机升级到自主飞行系统,设计并安装了外部航空电子系统。系统安装了一些传感器和设备,包括高精度IMU、Novatel OEM617双天线差分GPS、Velocyne DLP16激光雷达扫描仪、自制无线数据链等。原厂遥控系统预留了备份和危险规避。四旋翼无人机的传输线检测电子学图如图2所示。
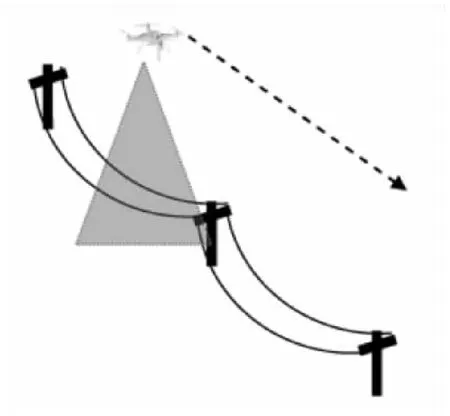
图2 四旋翼无人机的传输线检测图
无人机中的航空电子系统设计为两级结构。较高级别称为飞行控制器,它基于一个运行在1.5GHz的三星CPU板,带有8GB闪存和2GB 存取内存。处理器还包括一些外部接口资源,如通用串行总线(USB)枢纽、以太网接口、通用异步接收发送器(UART)接口等。飞行控制器的航空电子设备的硬件结构如图3所示。

图3 无人机航空电子设备的硬件架构
根据原飞行器平台安装电机驱动器的要求,更新频率选择为500Hz。每个更新周期的全时间为2ms,这样处理器就足够快,这使得它能够处理所有的计算任务,包括传感器融合和控制律计算。但是这种处理器由于其有限的低电平,不足以处理其他任务,包括读取传感器和产生脉宽调制(PWM)信号。本文设计了一种基于FPGA的低电平输入/输出(I/O)并行数字模块,包括传感器读取和预处理、PWM信号捕获、输入信号封装、PWM产生等。选用AlteraTM CycloneⅢ系列FPGA,运行在50MHz,提供196个独立的I/O口,足以处理上述任务。上级处理器与下级数字I/O之间的数据链波特率为每秒115200bit。
3 软件设计
在无人机的处理器部分,选择C++作为编程语言。程序采用多线程结构设计,其中包括3个优先级不同的线程。主线程包括传感器融合、控制器计算、航路点生成和激光雷达数据处理等功能模块。I/O数据收发的子线程是最高优先级,它包含对时延敏感的同步时钟信息。GPS数据线和地面站命令线由于处理优先级要求较低,优先级较低。一旦收到完整的I/O数据帧,就会触发主定时器,并顺序执行功能块。此外,下层线程的数据被更新并存储在相关的堆栈中,等待主线程访问。飞行控制器软件架构如图4所示。
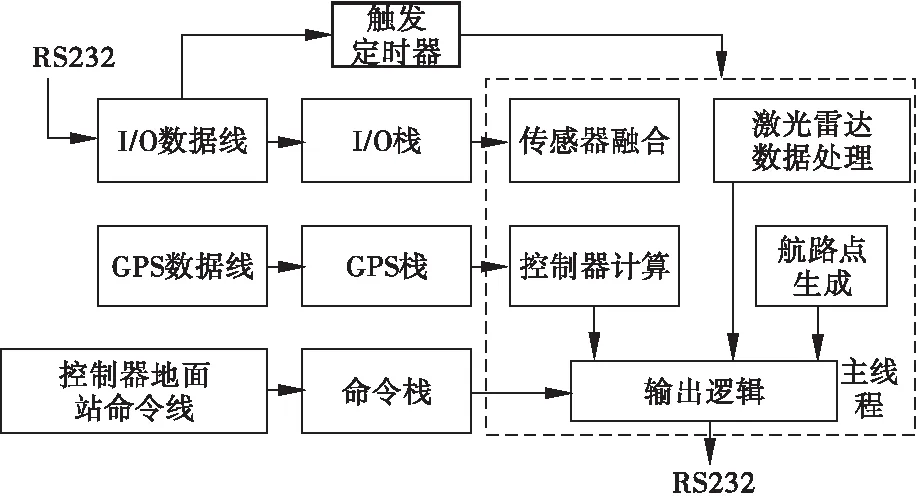
图4 飞行控制器软件架构图
在I/O数据处理部分,由于实时性的要求,采用FPGA设计了两个数据总线。该串行总线用于与A9处理器进行数据交互。为了避免丢失数据,设计了直接存储器访问(DMA)缓冲区来接收来自A9处理器的串行数据,该缓冲区可以独立地进行缓存。进一步设计了并行总线来处理采集传感器数据、从R/C接收机和超声模块捕获的PWM信号、产生PWM信号驱动电机等任务。并行总线上的任务可以独立工作,系统时钟最高可达500Hz。收集的数据存储在输出堆栈中。I/O模块的软件结构如图5所示。
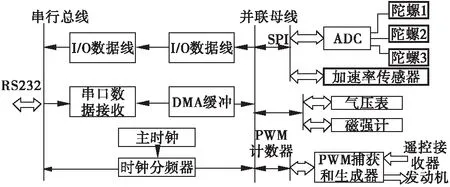
图5 I/O模块的软件结构
作为硬件和软件设计的总结,执行时间分别由各个层次来衡量。整个信号捕获时间,包括传感器读取和PWM信号的捕获,以及PWM信号的产生,低于0.3ms,通信时间低于0.2ms。此外,传感器融合和控制器计算的时间可以减少到1ms以内。这样在一个周期内总执行时间小于1.5ms,为先进的数据融合和控制策略提供了足够的能力。
4 卡尔曼滤波器设计
卡尔曼滤波是一种有效的噪声数据滤波和高性能融合方法[9],本文针对激光雷达原始数据噪声严重、不连续的特点,设计了一种用于激光雷达数据处理的离散卡尔曼滤波器。状态方程如下所示。
(1)

(2)
其中,Px,Py和Pz分别代表位置,Vx,Vy和Vz分别代表速度。
第k次迭代的测量方程为:
(3)

离散卡尔曼滤波可以表示为:
(4)

5 飞行试验
利用四旋翼无人机样机进行了实际飞行试验。设置了预定路径点,使四旋翼飞行器能够在输电线路上方飞行。为了评估样机的性能,选择了单根传输线的场景。首先,将四旋翼无人机手动操作到靠近一条电源线的位置,然后无人机开始跟随检测到的传输线飞行,将收集到的数据被送往地面站。图6给出了传输线检测和跟踪的重构数据。可以看出,原型系统能够正常工作,成功地检测到了输电线路并跟踪了它。
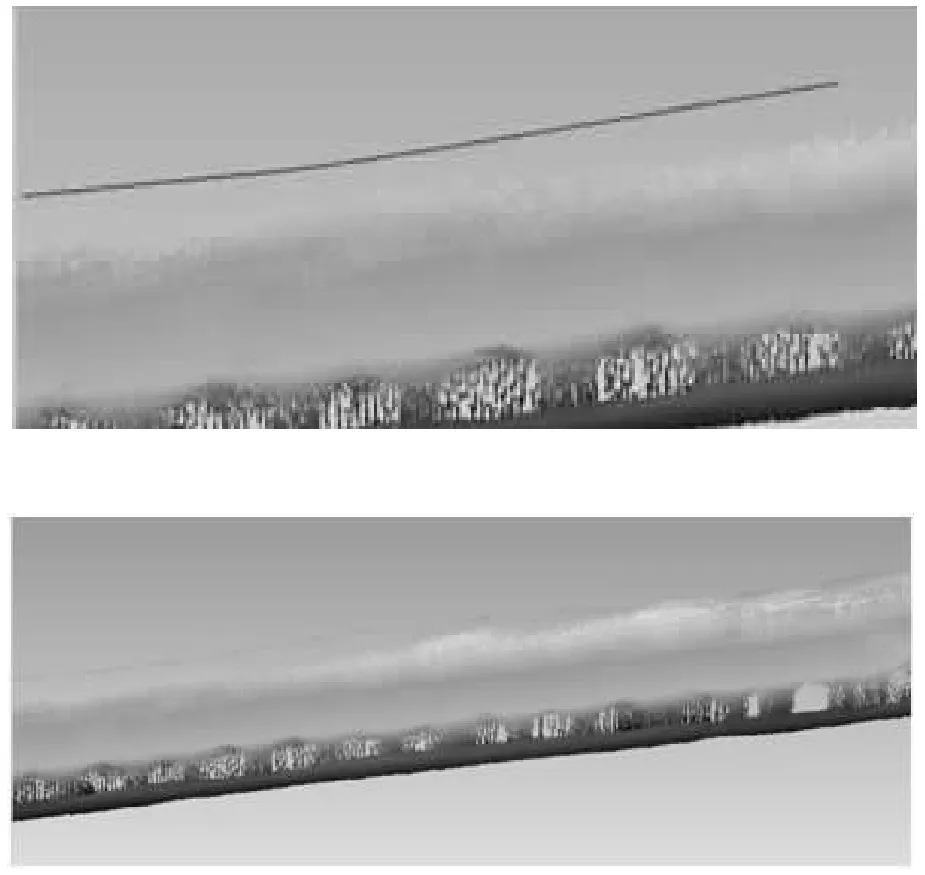
图6 处理过的激光雷达数据,经滤波后的传输线被四旋翼无人机成功捕获并绘成黑线
6 结论
本文利用四旋翼无人机设计了一套输电线路实时自主跟踪巡检系统,并安装了双天线GPS、激光扫描仪和飞行处理器。飞行处理器软件设计为两级,下层用于传感器数据采集,上层用于控制律计算和滤波。利用卡尔曼滤波器从GPS和激光扫描仪获取传输线的位置,产生相对位置、速度和航向,进行了实际飞行实验,验证了所设计系统的可行性。在今后的工作中,将设计一种新的算法来同时检测多条线路。并将控制器设计在其中考虑外部扰动的先验知识,这样就可以获得鲁棒跟踪性能。
