基于多目标离散粒子群优化算法的微电网重构
2021-07-05杨兴海张灵杰陈国栋
杨兴海 张灵杰 陈国栋
上海电气输配电集团 上海 200042
1 研究背景
微电网重构的主要任务是,在微电网因操作不当而出现设备异常等情况下,通过改变系统开关状态,最大限度对全网负荷快速恢复供电,提高系统的可靠性和连续性,维持微电网生命力。网络重构属于组合优化非确定性多项式难题,具有多目标、多约束、非线性的特征属性[1-2]。目前,国内外学者求解这类问题的方法主要是根据各目标的重要性或偏好进行加权处理,将多个目标融合为单个目标,并利用遗传算法、禁忌搜索算法、进化算法、粒子群优化算法等现代寻优方法,进行优化求解[3-5]。然而,由于不同性质的目标之间不易定量评比,各目标加权分配依赖经验主观性强,加权因数的确定缺乏理论支撑,使单目标方法难以保证重构方案的质量,并且无法提供多个方案以供备选[6-7]。多目标寻优求解中的最大问题是目标函数特征常常会彼此产生冲突,理论结果属于帕累托最优解集。
粒子群优化算法收敛速度快,结构简单,易于实现[8-9]。经扩展得到的多目标粒子群算法,运行一次即可得到一簇能够逼近帕累托最优前沿的解集,是求解多目标寻优问题的热门研究方法之一。在求解复杂问题时,如何有效平衡算法的快速收敛与种群多样丢失,提高算法的局部寻优能力,已成为粒子群优化算法改进工作的关键。
基于当前研究现状,改进了一种精英粒子扰动策略,并与多目标离散化的粒子群优化算法结合,得到一种改进寻优算法,用于求解微电网重构。在建立微电网重构模型时,综合考虑失电量、开关操作次数、容量约束等因素,引入线路负荷均匀度作为辅助评价指标[10]。这一算法以粒子速度变量为概率,向正方向或负方向移动一步来更新位置信息,实现多状态编码时离散状态之间的转换。精英粒子扰动策略可以动态调整成员粒子跳出陷阱的能力和局部精细搜索能力,提高算法效率。测试结果表明,这一算法寻优能力强,收敛速度快,适用于求解多目标离散微电网重构问题。
2 微电网重构模型
2.1 一般形式
对供电可靠性要求较高的微电网,通常由多个电源通过母线连接成环状或网状结构,闭环设计,开环运行。重要负荷一般具有备用供电线路,部分负荷直接挂接在发电母线上来保证优先权。多目标优化问题的一般形式为:
MinF(x)=[f1(x),f2(x),…,fM(x)]
(1)
式中:F为目标函数;x为D维搜索空间内的位置向量;f1、f2、…、fM为一组将D维搜索空间映射至M维目标空间的函数。
2.2 目标函数
目标1:考虑负荷重要性分级的故障状态下微电网失电负荷容量最小。
微电网负荷一般可按优先级分为三级,其中一级、二级为重要负荷,目标函数表示为:
(2)
式中:N1、N2、N3依次为一级、二级、三级负荷数量;Lg1a、Lg2j、Lg3k依次为一级、二级、三级负荷容量;λ1、λ2、λ3依次为一级、二级、三级负荷权重因数;xa、xj、xk依次为一级、二级、三级负荷自然状态下的布尔量,取值为0或1,表示负荷卸载或供电。
目标2:开关操作代价最小。
开关操作代价指标用于表征供电恢复方案的速度。不同的开关设备具有不同的动作时间,因此对不同类型的开关进行赋权处理:
Minf2=θ1S1+θ2S2
(3)
式中:θ1、θ2分别为自动、手动开关的代价权重因数;S1、S2分别为故障恢复时对自动、手动开关的操作总次数。
由于电源的投入需要较长时间,并且电源的投切是由能量管理系统根据微电网的实际运行情况决定的,因此不再考虑电源的投切操作。
2.3 约束条件
约束1:系统连续性与拓扑辐射状约束。系统中的重要负荷如果具有备用电源,那么要求正常供电线路与备用供电线路仅有一条可以闭合,有:
zpα+zpβ=1
(4)
式中:p为转换开关编号;zpα、zpβ分别为负荷的正常、备用开关处于打开或关闭状态的布尔量,取值为0或1。
约束2:支路容量约束。微电网重构后,各支路承载的功率不得超载,有:
yqSCq≤Cq
(5)
式中:q为支路编号;SCq为支路q重构后所需的容量;yq为相应支路的开断状态布尔量,取值为0或1;Cq为相应支路的允许容量。
2.4 辅助评价指标
多目标优化的结构为一组帕累托最优解集。为了帮助决策者筛选重构方案,采用电网结构均匀性指标对得到的重构方案集合进行定量评价。电力系统均匀性指标用于评价系统自身均衡处置各类不确定性因素的能力,指标值越大,表示微电网拓扑系统的可靠性与经济性越好。令系统线路负载率L为[L1,L2,…,LNL],其中线路u的负载率Lu为:
Lu=Pu/Pu,max
(6)
式中:Pu、Pu,max分别为线路u的实际输送功率和最大容量。
则系统均匀度指标为:
H=1-std(L)
(7)
式中:std为标准差函数。
3 多目标离散粒子群优化算法
基本多目标粒子群优化算法收敛速度快,容易编程实现。但是由于对初值敏感,局部寻优能力较弱,尤其是在处理多目标复杂问题时,种群多样性差,并且易于陷入局部极值,搜索到帕累托前沿的可靠性不高。为此,笔者对算法进行了改进,提出了一种精英扰动型多目标离散粒子群优化算法。
3.1 多目标粒子群更新公式
与单目标基本粒子群不同的是,多目标解的集中不是绝对的单一最优解,因此笔者采用如下公式对粒子的速度与位置进行更新:
vid(t+1)=ωvid+c1r1[PBest-xid(t+1)]
+c2r2[lBest-xid(t+1)]
(8)
xid(t+1)=xid(t)+sign[vid(t+1)]
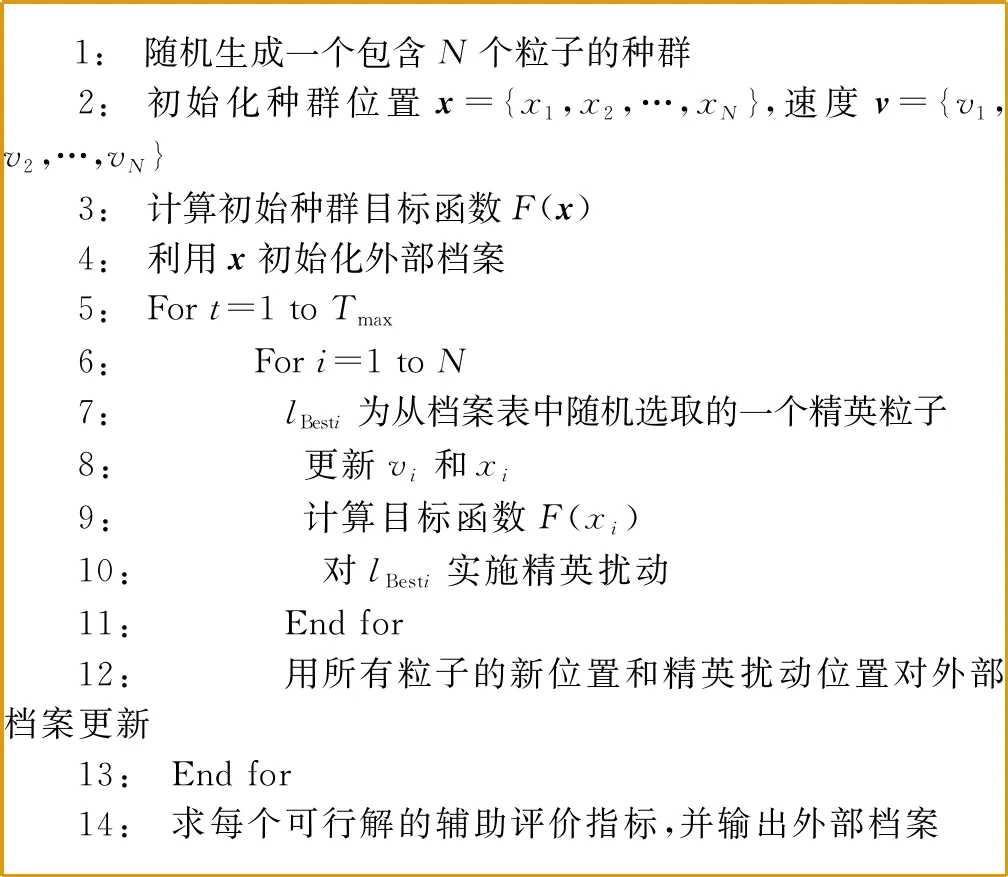
ifrand (9) sigm(v)=abs{2/[1+exp(-vt/Tmax)]-1} (10) 式中:i为种群中粒子编号;d为粒子维度;ω为惯性权重;c1、c2为学习因子,c1=2,c2=2;r1、r2为0到1的随机数;sigm为代换函数;abs为取绝对值函数;exp为以自然常数e为底的指数函数;t、Tmax分别为主程序当前循环序号和最大循环次数;sign为取符号函数;PBest为粒子历史最优位置;lBest为选取的精英粒子。 每次循环中,精英粒子都从外部精英档案中随机选取,这一方法也有助于种群保持多样性。 精英粒子能够引导其它成员向全局最优方向收敛,解空间中可能存在多个局部最优解,容易导致种群陷入局部陷阱,使搜索进入停滞状态。另外,当目标函数的最优值区域较为平缓时,在没有额外搜索策略的情况下,种群很难在最优值附近进行精细搜索。基于上述情况,笔者提出一种精英粒子扰动策略,为外部档案中的精英粒子提供精细搜索能力和跳出局部最优值的能力。 N(μ,σ2) (11) σ=Rmax-(Rmax-Rmin)t/Tmax (12) 式中:Xmax,E(k)、Xmin,E(k)分别为位置变量矩阵中E(k)维度下的最大值和最小值;N(μ,σ2)为服从正态分布的随机数;μ为均值;σ为标准差;t为当前迭代步数;Tmax为最大迭代步数;Rmax、Rmin分别为最大和最小扰动界限,Rmax=1,Rmin=0.1。 参数c的生成方法为: c=ceil[Rand(1+3t/Tmax)] (13) 式中:ceil为向上取整函数;Rand为0到1的随机数。 可以看出,该扰动策略以随机的方式从搜索空间抽取c个维度进行扰动。在离散空间中,单一维度的扰动很多时候无法使当前位置只经一步变换就从局部中跳出,而多维扰动可以克服这一不足。以两维空间为例,假设01为当前状态,而全局最优状态为10,如果00和11为劣解不被接受、保存,那么单一维度的扰动永远无法从01状态切换到10状态。另外,基于标准差σ线性递减特性,算法在早期赋予精英粒子较强的跳出局部陷阱的能力,在后期赋予粒子逐渐增强的局部精细搜索能力。 每一个循环结束,种群得到了新的粒子位置和精英粒子扰动后的位置,这些新的位置将被用于更新外部档案。因为笔者求解的是最小寻优问题,所以多目标帕累托最优的相关定义可进行如下表述: 定义两个同维向量x和y,如果向量x支配向量y,那么有: {∀i∈{1,2,…,m}:fi(x)≤fi(y)}∧ {∃j∈{1,2,…,m}:fj(x) (14) 在解集中,不被任何其它解向量支配的解称为帕累托最优解,所有帕累托最优解的集合称为帕累托最优解集。 利用帕累托支配关系,对所有新得到的位置向量与保存在外部档案中的历史解进行比较,并将所有不被支配的解向量保存至档案中。在求解过程中,庞大的非支配解集将影响算法的计算速度,需要限制外部档案的数量。当档案规模超过设定值时,计算所有保存在档案中的解向量对应的解空间欧氏距离,删除最密集的解向量,保持档案帕累托解集的多样度与均匀度。 笔者提出的多目标离散粒子群优化算法完整框架如图1所示。这一算法首先录入多目标问题,生成随机初始粒子群,利用初始粒子群的位置信息计算相应的目标函数,初始化外部档案。然后进入算法的循环迭代阶段,这是算法的主体部分。循环结束,则输出外部档案结果。 1: 随机生成一个包含N个粒子的种群2: 初始化种群位置x={x1,x2,…,xN},速度v={v1,v2,…,vN}3: 计算初始种群目标函数F(x)4: 利用x初始化外部档案5: For t=1 to Tmax6: For i=1 to N7: lBesti为从档案表中随机选取的一个精英粒子8: 更新vi和xi9: 计算目标函数F(xi)10: 对lBesti实施精英扰动11: End for12: 用所有粒子的新位置和精英扰动位置对外部档案更新13: End for14: 求每个可行解的辅助评价指标,并输出外部档案 笔者研究所用的微电网系统拓扑结构如图2所示,系统设备参数见表1。各个不同电源的配电母线由母联开关连接成环形,部分重要负荷由主电源的配电母线直接供电。图中,G为电源,LC为主配电板联络线,ABT为自动转换开关,MBT为手动转换开关。部分负荷提供双供电设计,实线表示正常供电线路,虚线表示备用供电线路。 图2 微电网系统拓扑结构 表1 系统设备参数 微电网的多目标重构问题是一种离散的开关问题,在使用多目标离散粒子群优化算法求解时,需要先对开关离散化编码。针对微电网的特点,笔者对转换开关采用0、1、2编码,对其它类型开关采用0、1编码。0表示负荷断开或离网,1表示使用常规路径供电,2表示使用备用供电。粒子编码序列的每个位置对应一个负荷开关。在多目标离散粒子群优化算法初始化时,随机生成粒子的离散编码位置向量,之后进入主循环迭代。 多目标离散粒子群优化算法参数设置如下:粒子数N为200,惯性权重ω从0.9到0.4随迭代过程线性递减,主程序最大循环次数Tmax为100,负荷权重因数λ1为1 000,λ2为5,λ3为1,开关权重因数θ1和θ2为1。 微电网故障前状态为:电源G1、G3、G4通过联络线路并联运行,电源G2停运,MainBus2通过联络开关CB7、CB9供电,联络开关CB2、CB5、CB13断开,其余开关均闭合,系统负荷处于常规路径供电状态。 联络线路LC3发生短路故障,联络开关CB9、CB10及电源开关CB3保护动作断开,G3退出运行,致使MainBus2、MainBus3负荷全部失电。 采用多目标离散粒子群优化算法进行多目标重构求解,得到微电网的故障重构方案解集,见表2。由该解集构成的帕累托前沿如图3所示。分析算例1可以发现,系统只有闭合联络开关CB5才可以对MainBus2、MainBus3所属负荷恢复供电,但由于此时发电容量为7,小于负荷总容量7.249。在开关操作代价f2最小的重构方案1中,闭合CB5后,只有将二级负荷L2切除才能保障其余负荷的电力供应,同时负荷损失容量f1最大。方案5中,负荷损失容量最小,但需要切除L6、L7等六个三级负荷,开关操作代价最大。方案2~方案4则是一些中间策略,其中方案3的辅助指标H最高,表明投入使用的联络线路的负荷率较为均匀。 图3 算例1帕累托前沿 表2 算例1故障重构方案解集 发电母线MainBus2发生短路故障,联络开关CB7保护动作断开,MainBus2失电。 采用多目标离散粒子群优化算法进行多目标重构求解,得到微电网的故障重构方案解集,见表3。由该解集构成的帕累托前沿如图4所示。分析算例2可以发现,MainBus2无法通电使用,其所属负荷只能转移至备用线路供电。在开关操作代价f2最小的重构方案1中,没有进行任何恢复操作,保持原故障状态运行。方案2中,只是将容量最大的一级负荷L9转至备用线路供电。方案5中,将L9、L10等四个负荷全部转至备用线路恢复供电,而负荷L11和L14由于没有备用线路只得失电,该方案负荷损失容量f1最小,开关操作代价最大,同时辅助指标H最大。方案3、方案4是两个中间策略。 表3 算例2故障重构方案解集 图4 算例2帕累托前沿 基于一种改进的精英粒子扰动策略,与多目标离散粒子群优化算法融合,得到一种精英扰动型多目标离散粒子群优化算法,用于求解微电网重构问题。在新算法中,粒子以自身速度变量为概率,向正方向或负方向移动一步来更新位置信息,提高了多状态编码时离散状态之间的转换效率。设计的多维度精英扰动策略能够显著提高粒子群的局部寻优能力和跳出局部陷阱的能力。在建立微电网重构模型时,将设备负荷均匀度作为辅助评价指标,为决策者提供了一种筛选方案。算例测试结果表明,这一算法搜索速度快,求解质量高,适用于微电网重构等多目标离散组合优化求解问题。3.2 精英扰动策略

3.3 外部档案维护策略
3.4 算法完整框架
4 微电网重构


5 算例分析
5.1 故障算例1


5.2 故障算例2


6 结束语
