电动汽车驱动电机控制系统电路设计①
2021-07-05王进升郑诗程余畅舟王庆龙
王进升,郑诗程,余畅舟,王庆龙
(1.安徽工业大学电气与信息工程学院,安徽 马鞍山 243032;2.合肥学院自动化系,安徽 合肥 230601)
0 引 言
汽车作为现代科技的产物赋予了人们生活极大的便利,伴随着环境污染、温室效应、不可再生能源的日益枯竭、全球能源危机等问题的不断加剧,百年后今天电动汽车再次成为人们关注的热点[1]。电动汽车是以车载电源为动力配合电机以驱动车轮行驶,符合国家道路交通、安全法规要求的车辆。相比于传统内燃机汽车,电动汽车因具有少污染、节能、低噪音、能源形式多样化等优势,而获得广泛关注[2,3]。当前电动汽车主要有3种类型:纯电动汽车(Battery Electric Vehicle,BEV)、混合动力汽车(Hybrid Electric Vehicle,HEV)和燃料电池汽车(Fuel Cell Vehicle,FCEV)[4]。其主要由电驱动及其控制系统、机械传动系统、实现有关功能的辅助系统组成[5]。拟针对其核心电驱动电路进行设计。
电动汽车的电驱动系统又由电源、驱动控制器、驱动电机等三部分组成。电动汽车用驱动电机主要有直流有刷电动机(DCM)、异步电机(IM)、永磁无刷电机(PMBLM)和开关磁阻电动机(SRM)四种。其中,异步电机因其具有结构简单、价格低、体积小、高可靠性、低转矩脉动、低噪声、维护方便等众多优点使得其在电动汽车上获得广泛应用[6]。
驱动电机控制系统包括软硬件两部分。其中,硬件电路主要由驱动单位及其控制器组成。驱动单元将电池中储存的电能转变为可驱动电机使用的电能,常见的驱动单元拓扑为电压源型三相变换桥;控制器则实现驱动电机的多种控制策略的实现,如矢量控制、V/F控制、直接转矩控制、模型预测控制等。硬件电路对于整个电机及电动车系统的高效可靠运行、良好的动态性能有至关重要的作用[7]。
以电动汽车用异步电机作为对象,给出了控制系统硬件电路总体结构,设计了功率电路和控制电路的参考电路,分析了交直流电压采样电路及交流电流采样电路的采样信号低频段输入输出关系,对设计的电路进行了实验验证,给出了实验结果。
1 控制系统电路结构
电动汽车驱动电机控制系统电路采用数字化结构,由功率电路和控制电路两部分组成。其中,功率电路由主电路、IGBT驱动电路组成;控制电路由DSP控制器,电压、电流及位置等信号采样及调理电路及故障与保护电路等组成,其电路结构框图如图1所示。
2 功率主电路设计
电动汽车功率电路器件可选用IGBT、MOSFET及集成功率模块IPM。其中,IPM模块集成有缓冲、保护等电路,可实现对欠压、过流、短路、过热等故障的保护。为简化主电路设计,选用三菱公司的PM150CLA120模块,其主电路拓扑为三相两电平桥,额定电压1200V,电流150A。所设计的功率电路如图2所示。

图1 控制系统硬件框图

图2 主电路原理图
3 IPM驱动与保护电路设计
3.1 IPM驱动电路
TMS320F28335输出的PWM信号经74HC245的缓冲与电平转换,产生6路驱动信号HU、HV、HW、LU、LV、LW,各路驱动选用上升延时tpLH和下降延时tpHL为0.8us,并具有较高的共模抑制比CMR的芯片HCPL4504作为IPM的高速驱动光耦进行电气隔离。以U相为例,HCPL4504的驱动电路原理图如图3所示。DSP控制器生成的上管PWM信号经HU接入HCPL4504的3脚,当其为低电平,输出端6脚UP为驱动电压VU,以驱动相应开关器件导通;反之,当HU为低电平时,输出驱动电压为GNDU,可关断开关管。
3.2 IPM保护电路
IPM输出的保护信号xFO需经光耦隔离送往控制器,为保证保护信号良好有效传送,这里选用电流传输比CTR大于100%的TLP-521如图3所示。U相上桥臂UFO信号或下桥臂FO低电平时光耦副边导通,保护信号F输出高电平。

图3 U相驱动电路原理图
4 采样调理电路设计
4.1 交流电流采样电路
电动汽车的驱动控制需要对输出电流采样,采用基于霍尔效应的LEM传感器LA58-P,其原副边变比为1000:1(见图2)。所设计的电流信号调理电路如图4所示。变换器输出电流经LA58-P缩小1000倍经排线接入J18端口后通过R13转变为电压信号,再经由R14和C33构成RC滤波电路滤除高频噪声。滤波后的电压信号由运放LM258构成的跟随器,提供高输入阻抗和低输出阻抗以缓冲信号,输出通过被R24和R25分压并且叠加上1.65V的直流电压,再通过R30与C17组成的RC滤波后,最终送入DSP的AD端口。U相电压iu与进入DSP的电压信号Iuin幅值关系如式1。
(1)
4.2 直流电压采样
为增强系统抗直流电压扰动特性,使得直流电压与输出电压解耦,电动汽车控制还需对直流电压进行采样,设计的直流电压采样电路如图5所示,其原理与交流电流采样类似。
由R76~R79回路将直流电压转换为电流信号,并通过电压传感器LV25-P将电流变比为2.5:1并隔离输出,输出电流由R80将电流信号转变为电压信号,再经由R82和C64构成RC低通滤波电路滤除高频噪声。滤波后的电压信号由运放LM258构成的跟随器,提供高输入阻抗和低输出阻抗以缓冲信号,输出再通过R67与C53组成的RC滤波后,最终送入DSP的AD端口。直流电压Vdc与进入DSP的电压信号Vdcin幅值关系如式2。
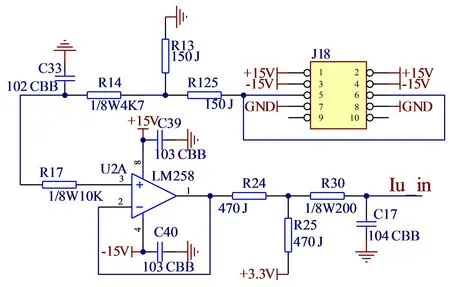
图4 U相交流电流采样电路
(2)
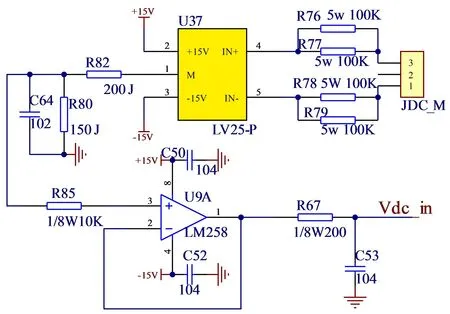
图5 直流电压采样电路
4.3 角位置检测电路设计
角位置利用光电编码盘对电动汽车的驱动电机的位置与转速进行检测,编码盘输出的6路脉冲信号经AM26LS32转换成3态门信号并通过6N137隔离送入DSP的EQEP外设,根据测速时间与脉冲数的关系,可计算出电机的机械角位置与转速。
5 实验结果
实验在一台15KW电动汽车驱动系统平台上进行,如图7所示,直流侧采用可回馈电源,其参数如表1所示。
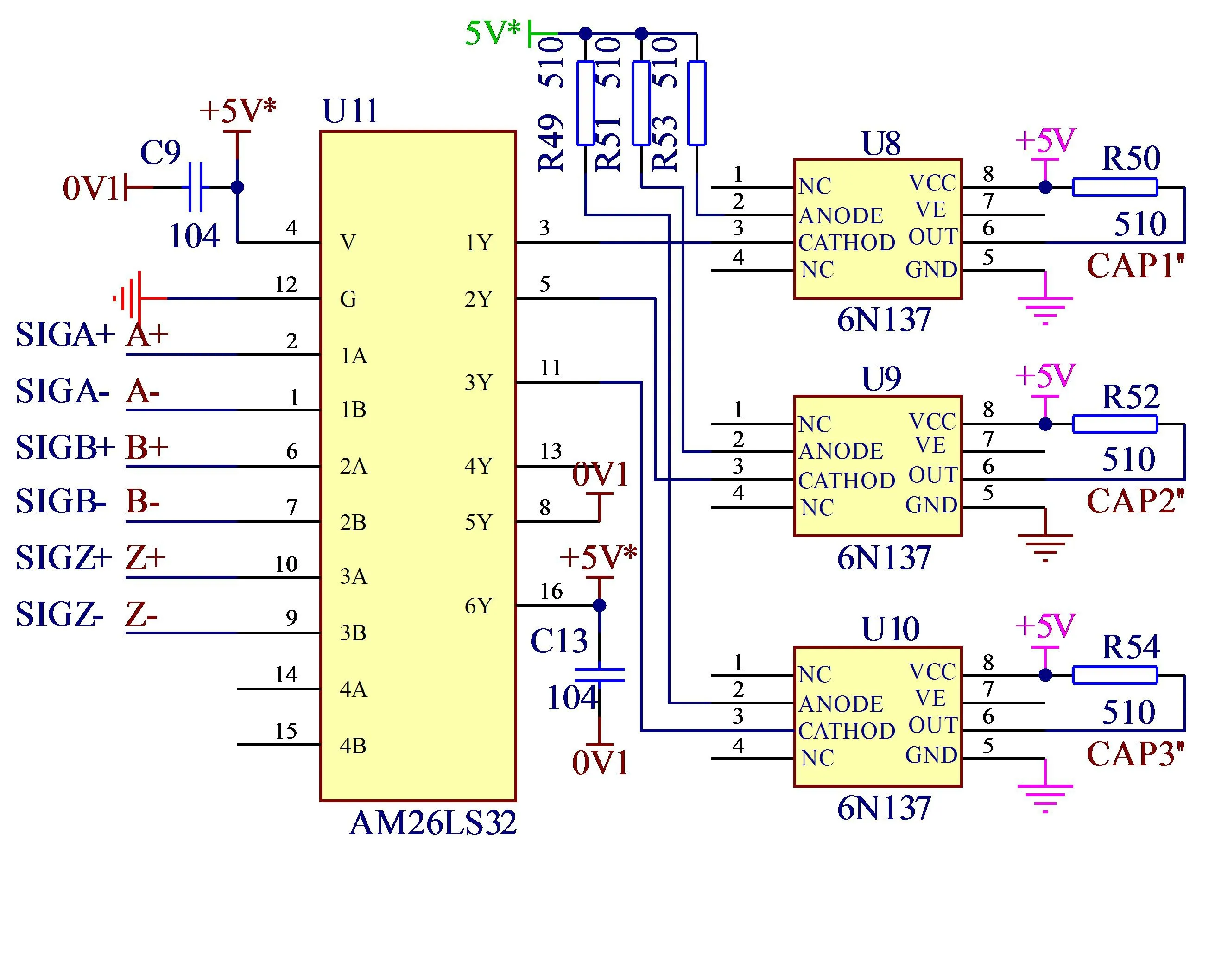
图6 光电编码盘测速电路原理图

图7 实验测试平台
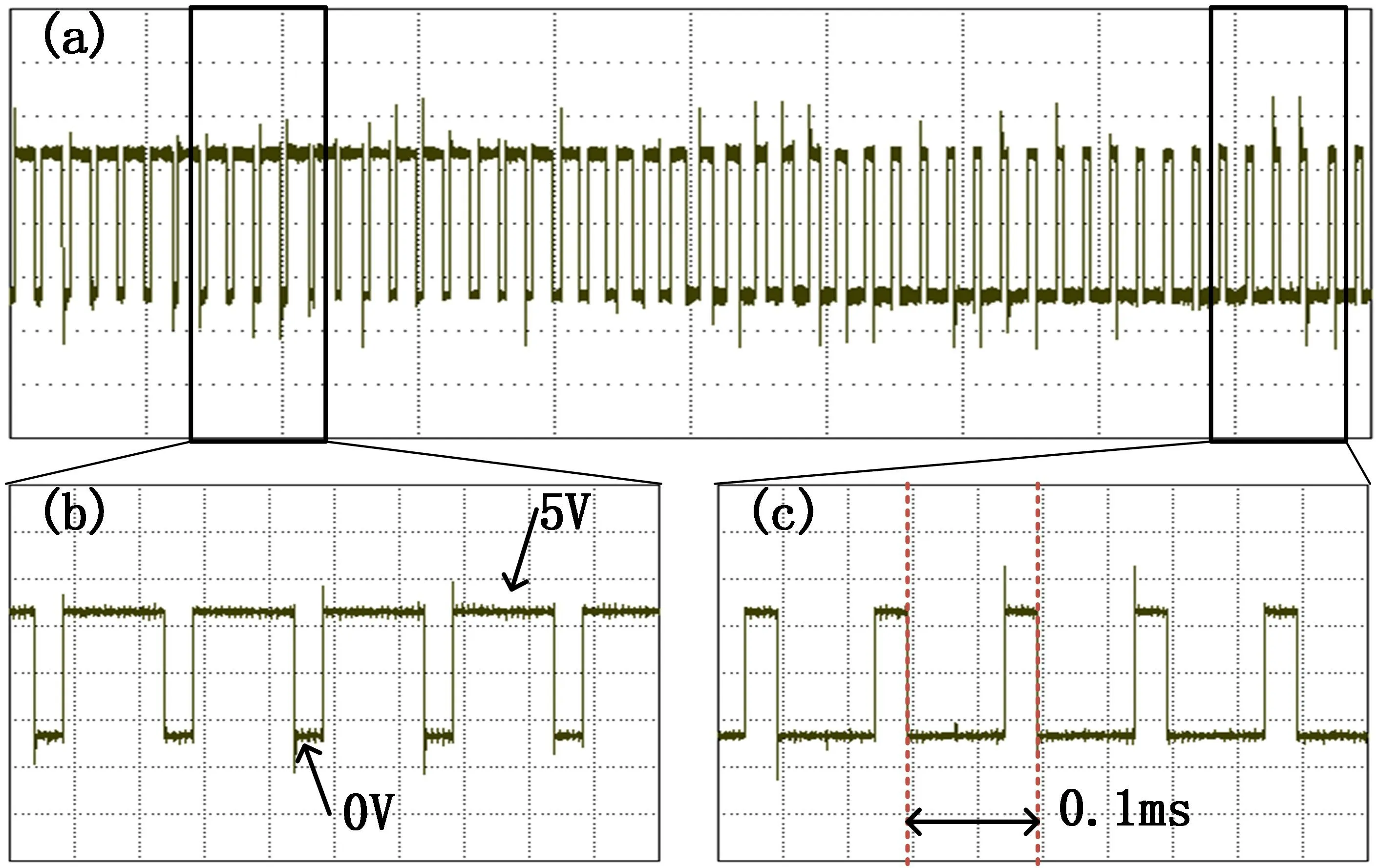
图8 驱动信号测试波形

图9 直流电压采样测试

表1 15kW电动汽车驱动系统平台参数
5.1 驱动电路输出电压波形
半周期PWM调制的驱动信号如图8(a)所示,其中图8(b)和图8(c)分别为高占空比和低占空比时的驱动信号。可见所设计的驱动电路能使得驱动信号能较好跟随DSP输出的PWM信号,并对IPM模块进行有效控制。
5.2 采样电路输出电压波形
稳态下,通过直流电源给定0-400V,测试输入直流电压与DSP的AD模块结果寄存器中的数值如图9所示。拟合出的数值y=164.3x-1120,与所设计的调理电路放大比例基本一致(式2),所设计的采样电路线性度较好。
5.3 稳态输出电流波形
图10为带电机负载的测试波形。图10(a)为电压电流波形,至上而下分别为相电流ia、滤波后的线电压uAB及线电压uAB,表明电流电压采样信号正常。图10(b)为转速波形。转速变化时,电流频率跟随变化。表明转速检测电路正常,电流动态响应较好,反映电路设计的正确性。

(a) 相电流及线电压

(b) 突加转速时A相电流
6 结 论
电动汽车驱动电机控制系统硬件电路对于控制系统可靠运行、良好的动态适应性及整车性能指标的稳定具有至关重要的作用。在介绍控制系统硬件电路结构基础上,对其功率电路、驱动电路、电压电流检测电路和测速电路进行了设计,并分析了直流电压采样电路及交流电流采样电路的输入输出信号关系。最后,通过15kW的电动汽车平台对所设计的电路进行了实验验证。通过实验表明所设计的电压、电流及位置检测电路能较好还原实际信号,电机驱动控制系统能较好地工作。
