基于MPU6050的高精度钻孔应力计安装杆设计
2021-07-05朱凯张艳东
朱凯 张艳东
(济宁矿业集团有限公司安居煤矿 山东省济宁市 272100)
钻孔应力计是监测矿井巷道岩壁应力大小的测量仪器[1]。在矿井生产过程中,原岩体受力平衡状态被打破,采动应力重新分布,易产生冒顶、片帮等冲击地压重大安全隐患[2,3],为实时准确的掌握采动应力场分布情况,企业通常需要安装多个钻孔应力计综合分析岩体应力。
钻孔应力计主要有2 种类型,应变片式矿用应力计和膨胀枕式矿用应力计。从测量原理看,应变片式矿用应力计测量的应力数据为垂直于电阻应变片方向的力,膨胀枕式矿用应力计测量的应力数据为垂直于油枕方向的力,这两种应力计测量与其主要受力部件垂直方向的应力大小,受地质构造和应力计特点的影响,计算得到应力数据往往存在较大误差[4]。因此,在安装应力计时存在以下几点要求:
(1)将应力计垂直应力方向放置于岩体内,能提高应力值获取的精度。
(2)应力计安装过程中应能前后移动、左右旋转,安装完成后可将安装杆抽出。
(3)应力计安装过程中应能实时了解应力计倾角。
为提高测量准确性,有见一种解决方案,即在应变片式矿用应力计中嵌入三轴加速度传感器,以得到应力计在煤柱中的倾角[5]。其不足之处在于加速度计算倾角需进行积分运算,在调整应力计倾角时,受人为旋转速度的影响,易产生积分误差,并且每个应变片式应力计均带有三轴加速度传感器,其制作工艺复杂,增加了制造成本。
针对以上问题,本文介绍一款通用型高精度矿用应力计安装杆,该安装杆由应力计连接头、延长杆和手持显示器组成,其中应力计连接头中内嵌姿态传感器,通过CAN 总线与手持显示器通信,在手持显示器上实时显示应力计姿态,从而实现应力计精准安装。
1 矿用应力计安装杆总体设计
通过对矿用应力计安装要求分析与方案比较,设计了如图1所示的应力计安装杆总体结构。

图1:应力计安装杆系统框图
该结构以姿态传感器为核心,将姿态传感器固定于应力计连接头中,应力计连接头与应力计实现紧密配合,之间不产生相对转动,保证传感器与应力计姿态一致,姿态数据通过总线实时传输至手持显示器显示,操作简单,安装人员可根据需要调整安装角度,确保了安装质量。
2 应力计安装杆硬件设计
根据应力计安装杆功能需求,设计了其硬件框图,如图2所示。

图2:应力计安装杆硬件框图
2.1 应力计连接头结构设计
为满足安装要求,设计了一种两次旋进式应力计连接头结构,如图3所示。
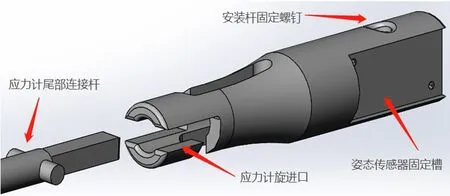
图3:应力计连接头结构图
连接头内部为方形渐缩孔,经插入‐旋转‐再插入的方法,与应力计尾部连接杆紧密配合,保证连接头与应力计之间无相对转动,并且在岩壁钻孔内能够自由推拉,而不至应力计脱离该连接头,在安装完成后经拉出‐反向旋转‐再拉出的方法将安装杆取出。另外,姿态传感器固定于应力计连接头的凹槽中,用冷补胶密封,使得姿态传感器、应力计连接头、应力计三者旋转角始终保持一致。
2.2 姿态传感器模块硬件设计
姿态传感器模块以MPU6050 陀螺仪传感器为核心,搭载高效阻容滤波电路,有效降低测量噪声,提高测量精度。模块内置MM32L051 单片机,用于分析、筛选、打包、发送姿态数据。原理图如图4所示。
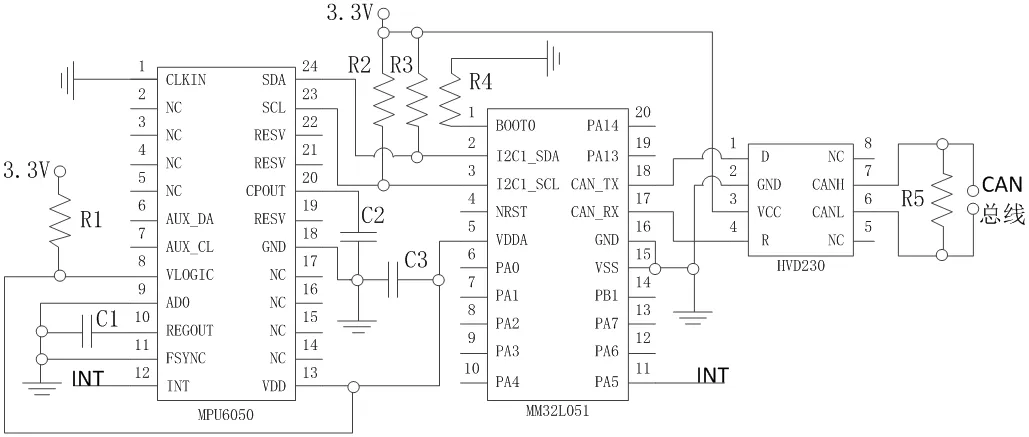
图4:姿态传感器模块原理图
MPU6050传感器是一个将3轴陀螺仪,3轴加速度计和DMP(数字运动处理)封装在一个4×4×0.9mm 的小型封装中,姿态数据以每帧11Byte(2 Byte 帧头+8 Byte 数据+1 Byte 校验)经400kHz 的I2C总线与设备寄存器进行通信的姿态传感器,具有小尺寸,低功耗,高精度、高耐震性等特点,适用于在狭小空间采集姿态数据[6]。
要实现精准安装,关键在于建立姿态传感器与手持显示器间的通信。I2C 总线传输距离短,常用于板内通信,而应力计安装深度达20 米,显然I2C 总线无法满足设计需求,另外常用通信方式有RS485、CAN 总线等,RS485 是一种主从式的单字节通信标准,使用灵活,接收数据后需要设计软件进行数据的检查、解析、分类和使用[7]。而CAN 总线是以数据帧方式进行通信,具备硬件错误检测、过滤等功能,每帧最多可发送8 字节数据,比RS485 通信效率高,CAN 总线非常适用于可靠性高、传输短信息的工业控制系统[8]。所以,本文采用CAN 总线实现姿态传感器与手持显示器间的通信。
为此,在模块中嵌入MM32L051 微型单片机,以满足I2C 总线数据与CAN 总线数据之间的转换。在I2C 总线上需连接两个上拉电阻以稳定信号,INT 引脚为姿态数据中断引脚,用以通知单片机接收数据。MM32L051 单片机收到姿态数据后以CAN 消息格式打包发送至CAN 收发芯片(HVD230),最终由CAN 收发芯片发送至CAN 总线上。
2.3 手持显示器硬件设计
手持显示器硬件原理图如图5所示。
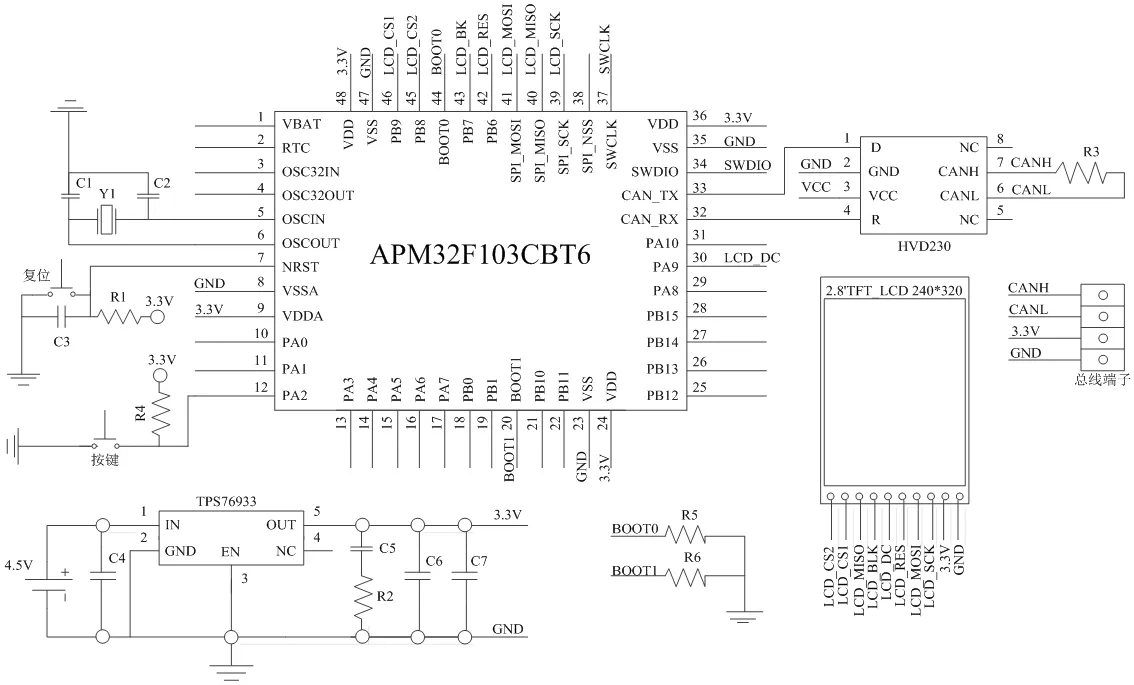
图5:手持显示器硬件原理图
2.3.1 嵌入式处理器
一个可实现CAN通讯、姿态解算、LCD显示功能的手持显示器,其性能与所采用的微处理器密切相关。为同时兼顾需求与成本,本文选用了一款集CAN、SPI、FPU(Floating Point Unit,浮点运算单元)的国产ARM Cortex‐M 内核APM32F103CBT6 微处理芯片作为手持显示器的处理器[9]。
APM32F103CBT6 最小系统包括低电平阻容复位电路;外部16M 晶振,通过内部锁相环电路倍频至96MHz,再经分频后供给各外设使用;下拉BOOT0、BOOT1 引脚至低电平,使处理器从内部Flash 启动;对系统的调试与仿真,采用两线制串行SWD 接口[10]。
2.3.2 电源电路
手持显示器需要3.3V 电源,使用三节5 号干电池串联后作为基本电源,然后利用低压差线性稳压器TPS76933/0.2A 转化得到所需电源。
2.3.3 CAN 通信设计
外部的CAN 收发芯片型号与姿态传感器模块CAN 收发芯片相同,由3.3V 供电,芯片的 CAN 发送(D)、CAN 接收(R)分别连接APM32F103CBT6 处理器的CAN_TX、CAN_RX 引脚,CAN 收发芯片的CAN_H 和CAN_L 之间接入120Ω 终端电阻,用于消除信号反射对总线通讯的影响,然后再将CAN_H 和CAN_L 连接到安装杆CAN 总线上,以实现最高1Mbit/s 的通讯速率[11]。
2.3.4 显示模块
LCD 显示部分采用2.8 英寸TFT 彩色屏,分辨率240*320,通过SPI 接口实现LCD 显示连接,其功耗不大于0.22w,PA2 为按键功能引脚,通知CPU 点亮或关闭显示屏,在本设计中,主要显示采集到的角度数据并以动画形式显示应力计姿态。
3 软件设计
应力计安装杆主要任务是精准安装应力计,由姿态传感器采集姿态数据,紧接着将数据交给单片机处理后发送至CAN 总线上,手持显示器实时接收CAN 总线数据,在LCD 上用动画的形式形象的展现应力计当前姿态,以及时调整应力计倾角,正确安装应力计。所以,该系统软件主要包括两部分,分别为姿态传感器模块软件设计和手持显示器软件设计。
3.1 姿态传感器模块软件设计
姿态传感器模块需要完成4 大任务,分别为接收姿态数据、分析姿态数据、筛选姿态数据、发送姿态数据,软件流程如图6。
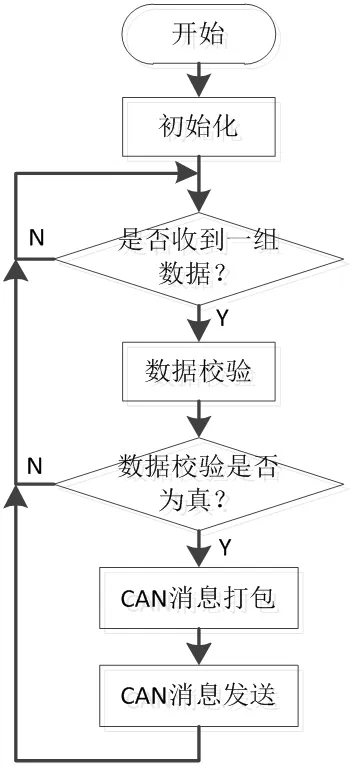
图6:姿态传感器模块软件流程
MPU6050 实时测量当前姿态,以9600bps 速率向I2C 总线发送姿态数据,当MM32L051 收到由MPU6050 的INT 引脚发出的中断信号时,立即接收数据,并暂存于临时数组中。当收到数据帧尾时,对该段数据进行校验,检查数据的完整性,继而打包发送到CAN 总线上。
3.2 手持显示器软件设计
应力计姿态变化是一个动态的过程,因此,手持显示器需具备实时性,为满足这一要求,主控制器必须时刻处于接收数据状态。考虑以上因素,宜采用中断服务函数接收数据,软件流程见图7。
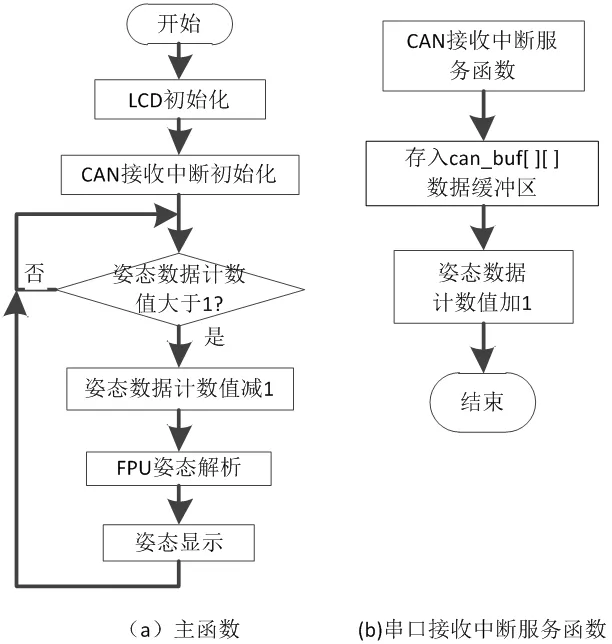
图7:手持显示器软件流程
手持显示器工作时,CAN 接收中断函数中断接收姿态数据,按顺序依次存入can_buf[][]数据缓冲区,并将姿态数据计数值加1。软件主循环实时检测姿态数据计数值,当计数值大于1 时,读取数据,加载到FPU 快速计算姿态,同时将姿态数据计数值减1,最终在LCD 上显示姿态动画。
4 结语
基于MPU6050的高精度矿用应力计安装杆整体效果如图8所示,进行了实地测试并应用,达到了预期效果,井巷应力数据的准确性大大提升,通过实际应用证明,这种矿用应力计安装杆的设计方案是切实可行的。

图8:应力计安装杆实物
