基于模糊控制的智能灌溉控制系统设计
2021-07-04张明岳高师杰
张明岳,高师杰
(西安工程大学电子信息学院,西安 710600)
1 引言
水资源是农业的命脉,我国作为农业大国,发展节水灌溉技术对于节约水资源和发展农业技术的重要性非比寻常,对我国经济建设以及科学技术发展也都具有重要的战略意义。《“十三五”农业科技发展规划》明确提出了“要充分发挥科技对加快农业现代化建设、促进农村经济社会发展的重要支撑引领作用”。
近年来,随着信息技术的飞速进步,以Zigbee、GPRS和物联网等新型通讯技术现实的智能灌溉系统应运而生,其中物联网技术的应用最多。物联网与灌溉系统的结合,不但实现了远程控制智能灌溉,也有效提高了灌溉效率,节约了水资源。其中,师志刚等人[1]以物联网为支撑搭建的智能灌溉系统,基本实现了智慧型农业,在实时灌溉及经济效益方面得到了改善,但在精准灌溉方面还不够完善。王宗省等人[2]将物联网与农业灌溉相结合,实现了自动化灌溉,但在精准灌溉方面没有具体阐述。
鉴于现有的研究成果,在此,基于物联网技术,将以STM32为主控芯片的灌溉下位机系统与电脑客户端或微信端通过服务器连接,同时运用模糊控制算法,以实现精准灌溉(包括电脑/微信端智能监测、指令灌溉以及下位机智能决策等)。
2 灌溉控制系统搭建
按照系统总体任务需求进行设计。系统整体结构图如图1[3]。
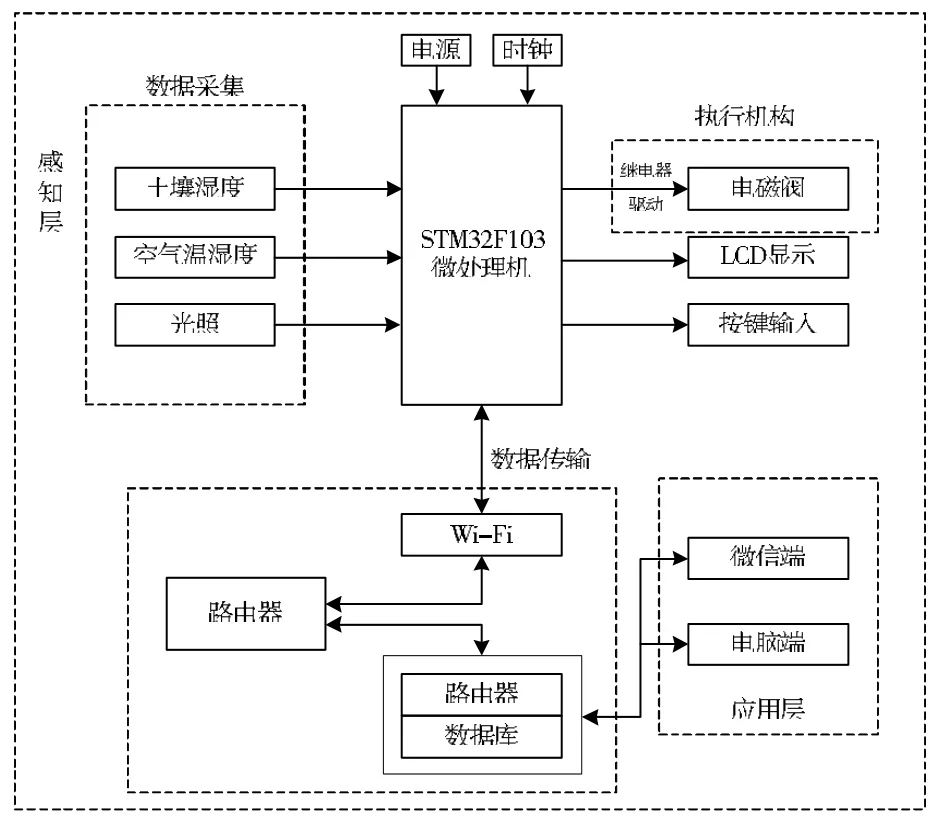
图1 系统整体结构框图
由图可见,系统主要由三个部分构成:
感知层:以STM32ARM微控板为核心,与DHT11空气温湿度传感器、TH-FDR2000土壤水分传感器以及光照传感器等设备建立连接,用来采集作物所处环境参量数据。利用无线传感器网络技术建立一个自治、协同工作网络,并将外接设备与互联网中的其他设备进行信息交互与资源共享。
网络层:以阿里云服务器和MYSQL数据库作为智能网络平台,将Wi-Fi模块传输得到的数据用PHP语言存入数据库,供微信进行数据调用。
应用层:用户可通过电脑端或微信公众平台[4]发送数据请求指令以及灌溉指令等,再由感知层根据指令要求发送当前状态下采集的环境参量数据或驱动继电器动作,从而使电磁阀的阀门处于不同的开度,满足不同状态下作物生长所需的水量。
3 硬件设计
设计选用STM32F103RCT6作为微控制器芯片,它是一种32位Cortex-M3CPU,因其价格实惠、体积小巧、内部资源丰富等优点,被广泛应用于各类控制设备和仪器仪表中。该芯片用于控制智能传感器组群采集环境信息数据,并将采集到的数据进行打包发送,以供查看和后续控制策略的实施。同时它也是电磁阀开关的控制单元。STM32F103芯片基本参数[5]由表1详细给出。
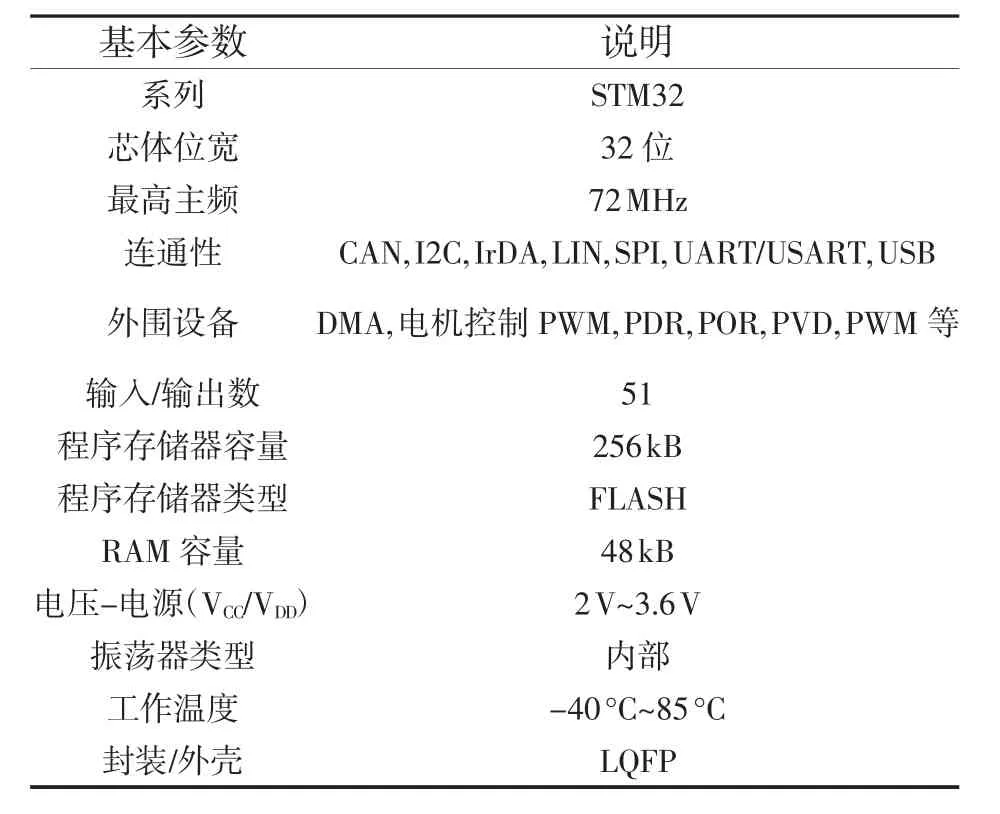
表1 STM32F103RCT6基本参数
系统中选用的土壤墒情传感器(TH-FDR2000)是一款利用高频电子技术制造的具有高精度、高灵敏度的土壤水分测量传感器。该传感器通过测量田间土壤的介电常数来探知土壤的水分含量,其电路连接如图2所示。

图2 土壤水分传感器电路连接示意图
空气温湿度传感器(DHT11)是一款具有校准数字信号输出功能的复合传感器。该传感器通过其内部感湿、测温元件在特定环境下计算校准系数并保存于内存中,当传感器检测信号时再对校准系数进行调用。此外,传感器接口采用单线制串行通信,在集成系统中使用方便且快捷。DHT11与MCU的具体连接如图3所示[6]。
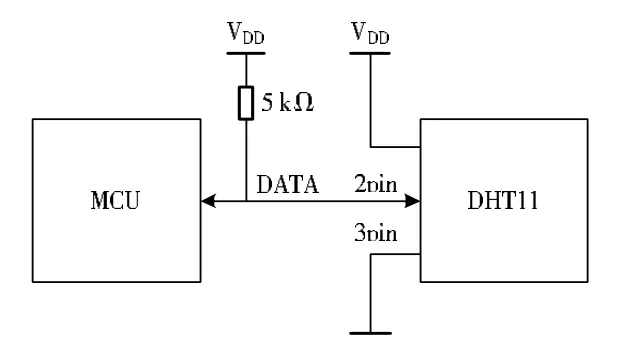
图3 DHT11传感模块与MCU连接
在此采用继电器来驱动电磁阀。当作物所处环境参量达到灌溉要求时,启动继电器,在线圈两端加上电压,利用电磁效应,使衔铁与静触点(常开触点)吸合,从而实现电磁阀阀门动作,达到不同的灌溉状态。如图4为电磁阀驱动电路图。

图4 电磁阀驱动电路
按设计实际搭建的系统整体硬件实物图如图5所示。

图5 整体硬件实物图
4 控制算法
4.1 模糊控制器算法
空气温度、空气湿度和土壤湿度作为作物生长的三个主要影响因子,具有较强的耦合关系,而光照强度与CO2浓度耦合度较低,易于独立控制[7],因此灌溉控制器采用模糊控制算法,并以空气温湿度与土壤湿度作为输入量。
先将输入量模糊化,模程为分级。若X∈[a,b],将模糊化用玛达尼(Mamdani)法进行极大极小推理:
若输入量X的变化区间映射到[-6,6],并使之离散化,构成论域[-6,6]内的13个整数元素的A,即A={-6,-5,-4,-3,-2,-1,0,1,2,3,4,5,6},则有:

式中y为区间内离散变量,若y非整数,则将其归为最接近的整数值,再将区间[-6,6]分为若干档,每一档对应一个语言值和相应的一个模糊集合。每一模糊集合对应一个隶属度函数,一般采用高斯函数。
设作物周围环境中实际温度为Ti,目标设定温度值为Tr,实际湿度为Hi,目标设定湿度值为Hr,土壤实际湿度为Wi,目标湿度为Wr,进而设空气温度误差T=Ti-Tr,空气湿度误差H=Hi-Hr,土壤湿度误差W=Wi-Wr。其中,空气温度误差T和空气湿度误差H都用5个模糊状态来表述,即:NB(负大)、NS(负小)、ZO(零)、PS(正小)、PB(正大);土壤湿度误差W用6个模糊状态描述,即:NB(负大)、NS(负小)、NZ(负零)、PZ(正零)、PS(正小)、PB(正大)。
输出变量为阀门开启度,用4个模糊状态来表述:NZ(关)、PZ(半关)、PS(中等)、PB(全开)。其每一个模糊集合隶属度函数均为三角函数。控制器为三输入一输出,按以如下规则为例的形式创建规则库:
If(W is PB)and(H is NB)and(T is NB)then(U is NZ)
这句规则的意思是:如果土壤湿度偏差为正大与空气湿度偏差为负大与空气温度偏差为负大,则电磁阀关。诸如此类,一共150条模糊控制规则。实际创建规则的界面如图6所示。
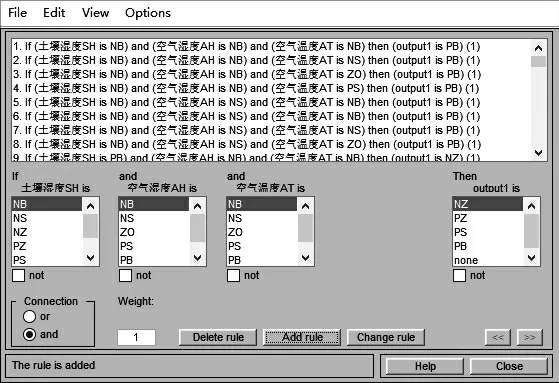
图6 规则库的创建
最后采用最大隶属度法选取隶属度最大的元素作为输出量,完成解模糊。
4.2 远端WEB设计
服务器和数据库通过HTTP协议传输传感器组群采集得到的数据,采用PHP脚本语言编写与MYSQL进行数据库连接。由客户端发送请求指令,建立TCP连接,服务器监测到请求作出响应。
在PHP中,通过mysql_connect()函数创建数据库连接。语法为:

其中,servername为要连接的服务器,username为登录所使用的用户名,password为登录所用的密码。系统使用tj.php这个文件来与Navicat for MySQL数据库进行连接并存储温湿度数据。PHP将GET请求封装在$_GET数组中。
实现数据传输与存储的相关PHP脚本语言如图7所示。监控整体效果如图8。

图7 用PHP语言实现数据传输与存储

图8 监控整体效果
5 灌溉实验与分析
输入变量为空气湿度偏差H、空气温度偏差T、土壤湿度偏差W,其论域均为[-6,6],输出变量为阀门开启度U,对应论域为[0,3]。在此以MATLAB模糊工具包作为研究手段,对其规则进行推理。实验过程如图9所示。
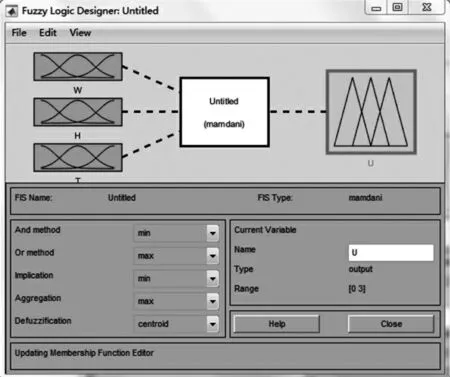
图9 Simulink仿真过程界面
利用模糊规则所得出的仿真结果如图10所示。其中,当W=-6,H=-2,T=0,U=2.27,表示土壤湿度偏差为NB,空气湿度偏差为ZO,此时阀门应尽量全开[8]。又如当W=0,H=1.6,T=6,U=1,表示土壤湿度偏差为PZ,空气湿度偏差为PS,空气温度偏差为PB,此时阀门应处于半开状态。在实际控制时控制量“2.27级”和“1级”要转换为精确的物理量,通过该值控制阀门的输出电压,从而控制阀门的开启度[9]。
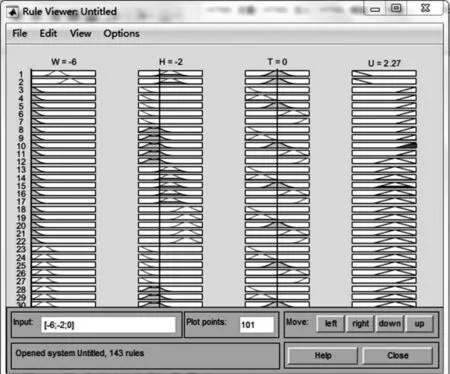
图10 模糊控制规则浏览器
控制器执行结果为电磁阀的4个状态,关、半开、中等、全开,本系统以水泵的抽水时间表示输出量。经多次测试,得出空气温度x1、空气湿度x2、土壤湿度x3这三个参数与水泵抽水时间y的关系,部分详细测试数据如表2所示。
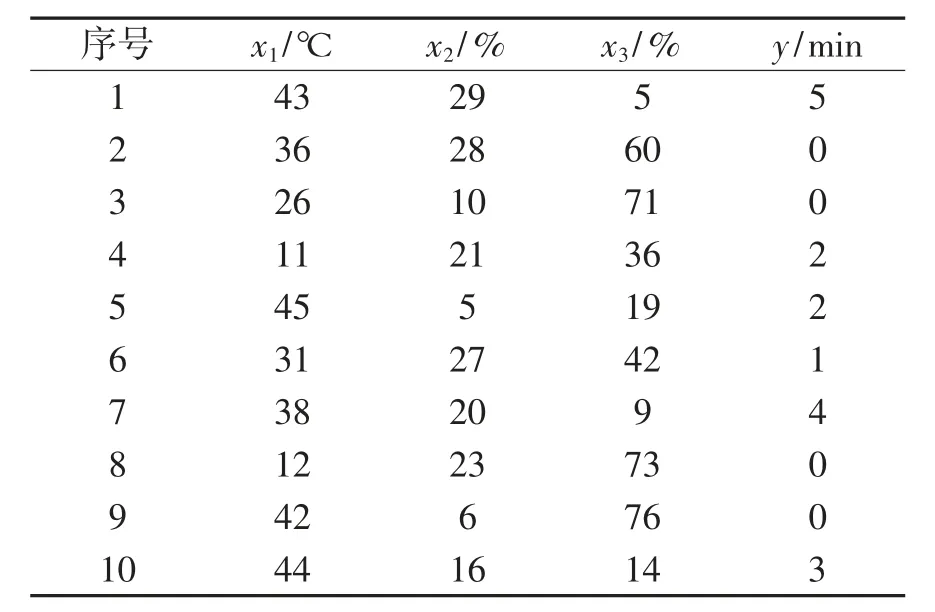
表2 三个参量与水泵抽水时间关系(前10组)
由表2中第一组数据可知当前环境下水泵抽水,对应电磁阀为全开状态;由第二组数据可知当前环境下水泵不抽水,电磁阀关闭;由第四组数据可知当前环境下水泵抽水,对应电磁阀为半开状态。其他情况可按同理推知[10]。
6 结束语
将物联网与客户应用端相结合,设计了一款智能灌溉控制系统。系统安装、操作简便,成本低廉,经多次试验,获得了稳定、可靠的运行效果,能够完成作物所处环境参量的采集,并有效地进行实时远程监测以及自动调控灌溉时间及灌溉量,大大节省了劳力以及水资源。系统达到了精确灌溉的目的,其设计思路也可为现代化农业温室大棚的发展提供有价值的参考。
