一种新型海洋信息采集平台的设计与实现
2021-07-03宋泓儒马旭卓戴宪邦
史 博,宋泓儒,陈 琳,马旭卓,戴宪邦
(1. 哈尔滨工程大学 水声工程学院,黑龙江 哈尔滨 150001;2. 哈尔滨工程大学 物理与光电工程学院,黑龙江 哈尔滨 150001;3. 上海船舶设备研究所,上海 200031;4. 上海船舶工艺研究所,上海 200032)
0 引 言
随着人类海洋科学探索的不断深入,水声学与水下定位技术在海洋开发应用、海军装备建设等领域发挥作用[1],逐渐变为人们探索未来的重点,此项技术已经被人们广泛应用在海事侦察、航空航天等军事领域或目标识别[2]、定位导航等民用领域[3]。因此水下目标感知与海洋信息获取技术变得尤为重要,本文主要围绕某型水下航行平台实时性、高精度、便携式定位需求,设计一种新型海洋信息采集平台,基于FPGA逻辑单元的控制处理,搭配高精度GPS定位技术、对时技术,高速率无线传输技术,将所设计的平台安放长基线浮标单元,进行系统化、集成化的数据传输,为后续浮标基线大范围定位起到促进作用。
1 新型海洋信息采集平台概述
1.1 系统总体方案设计
新型海洋信息采集平台组成架构如图1所示。主要由电子舱、电源模块、蓄电池、GPS接收机、无线数字传输电台等几部分组成。利用FPGA总控处理板进行平台主控单元的数据解析与接口配置,单节点可通过GPS模块实时获取自身位置信息,水下航行平台在开始工作时将其内部的时统系统与GPS模块进行对时,保证系统处于同步工作的状态;无线数字通信电台用于各节点与总控单元的数据发送与接收。

图1 系统整体架构图Fig. 1 Overall system architecture
在进行海洋定位通信平台的设计过程中,各个分系统之间的通信方式与链路结构具有差异性。比如在浮标湿端与水下航行平台之间采用水声通信,船载数据接收端与船载显控平台端采用有线网络通信,水面浮标干端与船载测控平台、陆地岸站之间采用无线电通信。与此同时,各个分系统之间都有其对应的链路组成与结构划分,进而实现水下航行平台的定位校准功能。图2为海洋定位通信平台的系统拓扑结构图。
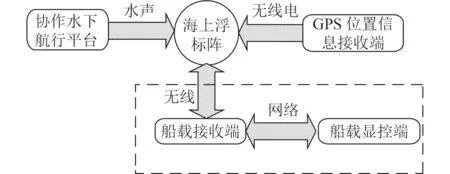
图2 定位通信系统拓扑结构图Fig. 2 Topological structure of positioning communication system
1.2 无线电台基本原理与选型
在辽阔的海面上,要实现水下声信息与GPS定位信息的实时上传,无线数字电台的超长距离传输功能可以实现上述方案。如表1所示,无线电台近几年随着发展逐步由模拟电台向数字电台方向靠拢[4],数字传输电台在一定程度上很好的弥补了速率差、精度低等缺点。按照项目需求与实际调研情况对比,选择4种国内外相关数字传输电台[5]。
通过表1和实际调研情况,选择Microhard无线数传电台模块作为数据传输系统,其主要性能有以下特点:
最高速率高达345 kbps;四级电路滤波提供极佳的噪声和干扰抑制;一对一、一对多网络通信结构;极小的封装 26.5*33*3.5 mm;与Microhard n920 F兼容;可以实现6 km以上数据传输,功耗低。

表1 国内外无线电台对比[6]Tab. 1 Comparison of radio stations at home and abroad
1.3 GPS模块基本原理与选型
GPS定位原理是测量待测物体与定位卫星之间的实际距离,根据其他卫星进行综合判断,最后确定准确坐标位置[7]。一般情况下,人们使用天线来接收,对接收到的信号进行数字化翻译,最后运用定位算法将其得到的数据进行处理,解算对应经纬度信息。
如表2所示,在GPS接收机的选型方面,本文也进行了大量的调研对比。国内外定位接收机在市场上种类繁多[8]。其中,UB4B0M虽然通道数相对较多,定位速度较快,但是其功耗在静态已经高达2.8 W,不适用于浮标等独立单元的工作;SUM六频与北斗星通定位模块精度达不到亚米级的要求;superstar、OEMstar等定位芯片用户测试与第三方评估效果还在考察中,K700定位模块的接收卫星类型种类相对较少,导致定位精度有一小部分偏差,最终选择Trimble(天宝)910定位芯片[9]。

表2 国内外定位模块功能表Tab. 2 Function table of positioning module at home and abroad
Trimble(天宝)910定位芯片采用美国Trimble(天宝)公司的一款性价比非常高的具有定位功能的板卡。此种类的接收机提供多卫星系统同时实现定位功能,并且在任何环境下都可以提供超高的定位精度,是一款性能较高、效果较好、能够实现单点定位精度达到1 m以下,符合项目指标的BDS/GPS/GLONASS三种卫星定位接收机[10]。
2 新型海洋信息采集平台设计
2.1 电源电路设计
海洋定位通信平台在进行多节点数据汇聚工作的过程中,系统能够有效的供电是声呐数据上传的重要保证。在整个模块电路中,逻辑主控单元FPGA核心板的工作电压为5 V,GPS模块电压为3.3 V,无线数字传输电台电压为12 V,所以该平台需要3.3 V,5 V,12 V三种,在确定各模块电压后,对每个器件的功耗进行简单估计,表3为功耗统计结果。
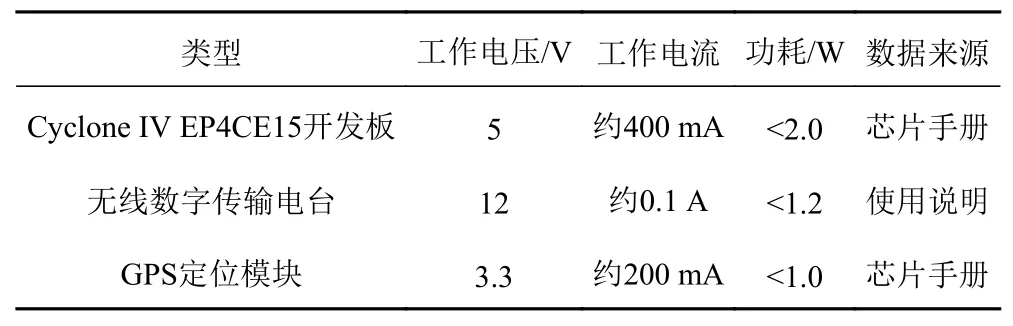
表3 系统模块功耗统计表Tab. 3 Power consumption statistics of system modules
根据表内的信息以及相关数据分析,当系统输入12 V直流电压时,电台模块可以正常工作,但是定位模块与FPGA核心板需要进行降压才能供电。根据大量的选型和论证,为了提高电压转换效率,选择MP1584电压转化模块,其具有低功耗、高转化率等优点。
MP1584是一款高频开关降压稳压模块,其内部集成了高压MOSFET系统使电路更加完善。其可以承受外部输入4.5~28 V宽度的直流电压,100 μA的静态工作电流[11],可以允许多种电池供电。为了减少开关驱动对电路造成的损耗,此芯片设计了内部高功率相互转化模式,有助于防止电流失控,提高转换效率与容错率。
2.2 无线数据上传格式设计
声呐数据通信协议主要包括下行数据协议和上行数据协议两大类,下行数据主要指测控平台下发控制指令;上行数据主要指自检响应指令、浮标上传数据及定位测距声呐船载测控平台上传至水上主控单元数据。浮标单元工作开始之后,当系统检测到浮标电子仓内接收机已经接收到声呐时延信号时,声呐时延数据通过无线电台上传母船。
2.3 系统逻辑控制程序设计
图3为新型海洋信息采集平台的时续逻辑流程图。本系统的工作以GPS输出的1PPS脉冲信号为基准,开机后检测开始工作指令,当开始工作指令达到后,每次GPS数据到达时,都询问声呐数据是否到达,当声呐数据到达时,将声呐数据通过无线电台发送给船载测控平台。当声呐数据没有到达时,继续将GPS位置信息通过无线电通信系统发送给母船。通常收到同步脉冲信号(1 pps信号)频率要小于收到GPS实时定位数据的频率,即收到一个PPS信号,收到几个GPS数据。

图3 FPGA逻辑框图Fig. 3 FPGA logic block diagram
如图4所示,灰色模块代表GPS的定位数据,白色模块表示水下声呐的时延数据,当系统开始正常工作时,FPGA检测到GPS数据到达而声呐时延数据未到时,将GPS数据通过无线电台上传给船载测控平台,当FPGA检测到声呐时延数据已经到达后,将声呐数据上传,由于FPGA自带并行逻辑处理功能,因此可以在每次GPS数据到达之后询问声呐时延数据,这样既保证数据运算处理迅速,又可以使系统定位精度提高。

图4 FPGA时序逻辑图Fig. 4 FPGA timing logic diagram
3 海洋定位通信平台测试与验证
3.1 实验室测试验证
在检查电台模块所有部位都已正常连接完毕后,进行上电测试,首先选择第1个场景:2个电台之间的通信距离为80.18 m,两电台之间均正常工作,测试时长为30 min,通信数据误码率为0%。
选择第2个测试地点,2个电台之间的通信距离为371.90 m。两电台之间均正常工作,测试时长20 min,通信数据误码率为0%。
上述2个测试为检测无线电台模块内部电路是否有故障发生,当有故障存在时,电台会处在不工作状态,当2个电台均正常工作时,说明无线电模块性能完好,并且已经可以实现当声呐数据上传时,系统可以完成检测功能,并将数据实时回传,具备在外场进行拉距测试实验。
3.2 外场拉距测试验证
在完成实验室联调与测试之后,根据定位测距声呐项目需求,保证声呐时延数据和GPS数据能够通过无线电通信系统上传给6 km外的船载测控平台,为此展开无线电台外场拉距测试实验[12],确定目前已有的2个无线电台最大通信距离与传输误码率。
表4为误码率与试验拉距距离数据记录表。

表4 系统定位误码率数据统计表Tab. 4 Statistical table of system positioning error rate data
根据实验数据与分析结果可以得出,随着拉距距离的不断增大,周围环境楼宇、树木等对于无线电信号的干扰也随之加大,如果在湖面或海面实验,传输效果将会有明显提高。当系统在7.895 km以内时,误码率很小,数据传输效果良好,满足项目指标6 km传输距离的要求。
由此可见,浮标定位通信系统的传输距离可达6 km以上,满足系统通信距离需求。在实际应用中,如果基线长度增大,系统传输距离不满足要求时,可以利用增加通信浮标作为中继端。通过此方法保证浮标阵元、船载测控平台与水下协作目标之间稳定、有效的工作,实现基线长度的可延展性。
4 结 语
本文根据项目需求论证水下高精度定位系统的具体组成方案,完成GPS接收机与无线传输电台的选型;在完成硬件设计的基础上编写了海洋定位通信平台声呐数据与定位数据的时序逻辑,并通过FPGA平台实现数据上传;初步测试了无线电通信模块的最大传输距离。经过多次验证,所设计的通信系统传输距离在7 km以内,误码率为1.5%,达到预期设计要求且满足设计指标。