外军飞机对海目标敌我识别错误机理分析 *
2021-07-02李宝鹏高伟亮郭维波
李宝鹏 ,高伟亮,夏 栋,郭维波
(海军航空大学青岛校区 航空电子工程与指挥系,山东 青岛 266041)
0 引 言
随着世界各国对海洋权益的不断争夺,海战场将成为未来军事冲突和局部战争主要发生地。舰载机作为海战场作战主要武器平台,承担着对海面军舰、潜艇等目标的预警、探测、打击等重要任务。飞机对海面目标敌我识别正确率和时效性,将会直接影响作战指挥与控制的准确性、不同作战单位间的协调性、联合作战系统的反应速度和误伤概率[1]。
近年来的军事冲突和局部战争,在整个误伤、误击发生事件中,地对地误击约占60%,地对空误击约占4%,空对地误击约占36%。相对地面战场和空中战场,海战场因为目标种类多、用频装备多、气象环境复杂、异常海杂波等导致电磁环境极为复杂,使对海目标敌我识别错误概率增加,导致发生误伤误击的隐患增大。1987年的波斯湾战争,伊拉克一架由商用客机改装的“猎鹰”50VIP攻击机发射了两枚“飞鱼”导弹,误击了美国正在执行巡航任务的“斯塔克”号护卫舰,造成37人丧生。2020年5月,伊朗“贾马兰”号护卫舰发射“努尔”反舰导弹,误击了本国参加军演的“科纳拉克”号支援船,造成40人伤亡。经分析,这些误击误伤都是敌我识别系统的失效或性能不完备造成的。因此,必须加强海战场环境下空海敌我识别错误机理研究,从技术改进和系统使用角度有效提高海战场环境下的敌我识别正确率[2-3]。
本文以西方体制Mark XII敌我识别系统为研究对象,通过分析飞机识别海上舰船目标(空海识别)敌我属性的机理,以机载雷达、机载询问机、舰载应答机之间的识别链路特性分析为切入点,研究了不同种链路条件下对应的敌我识别结果,并分析了多径效应、询问机距离/角度分辨率不一致、雷达与询问机天线波束中心不重合、多密集目标识别、电子对抗等造成的空海敌我识别错误的原因机理。
1 飞机对海目标敌我识别机理
以西方体制敌我识别系统Mark XII为例,飞机对海面舰船目标进行敌我识别采用的是协同式敌我识别,飞机和舰船分别搭载着询问机和应答机[4]。如图1所示,整个识别过程中参与的主要设备有机载雷达、机载询问机、舰载应答机。

图1 空海敌我识别设备组成
其中,机载雷达用于发现海上舰船目标,探测目标的距离和方位,向机载询问机触发敌我询问命令,显示目标敌我属性;机载询问机用来向目标发射询问信号,接收目标的应答信号,分析获取目标距离方位参数,解析目标的敌我属性;舰载应答机主要用来接收机载询问机发出的询问信号,发出应答信号。飞机对舰船目标进行敌我识别过程如图2所示。
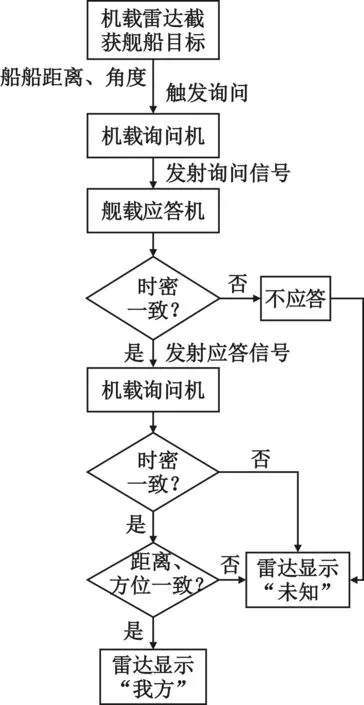
图2 空海敌我识别流程
机载雷达截获海面舰船目标,将目标的方位、距离信息提供给机载询问机,触发机载询问机向舰船所在区域发出询问信号(脉冲串信号,脉冲间隔采用统一时间加密)。舰船搭载的应答机收到询问信号,进行询问脉冲密码解析,若密码不正确则不应答,询问机在规定时间内未收到应答信号,目标属性判断为“未知”;若密码正确,则确认为友方询问,并发射应答信号(脉冲串信号,脉冲间隔采用统一时间加密)。机载询问机接收到目标应答信号,进行应答脉冲密码解析,若密码不正确,则判断目标属性为“未知”;若密码正确,则解析计算舰船目标距离和方位,并与雷达提供的舰船目标距离和方位进行匹配。若匹配成功,则识别为“友方”目标;如果距离方位不匹配,则识别为“敌方”目标,并将目标属性信息提交给雷达显示[5-6]。
整个识别过程三种设备时间的信号链路时序关系如图3所示。可见,飞机对海目标敌我识别链路,涉及到了机载询问机、机载雷达、舰载应答机,三种设备是否正常协调工作,询问与识别信号的传输链路是否完整,时序关系是否正常,信号的码型是否正确,均可能导致识别目标属性错误或者不识别,进而影响飞机正确识别海上目标的概率。
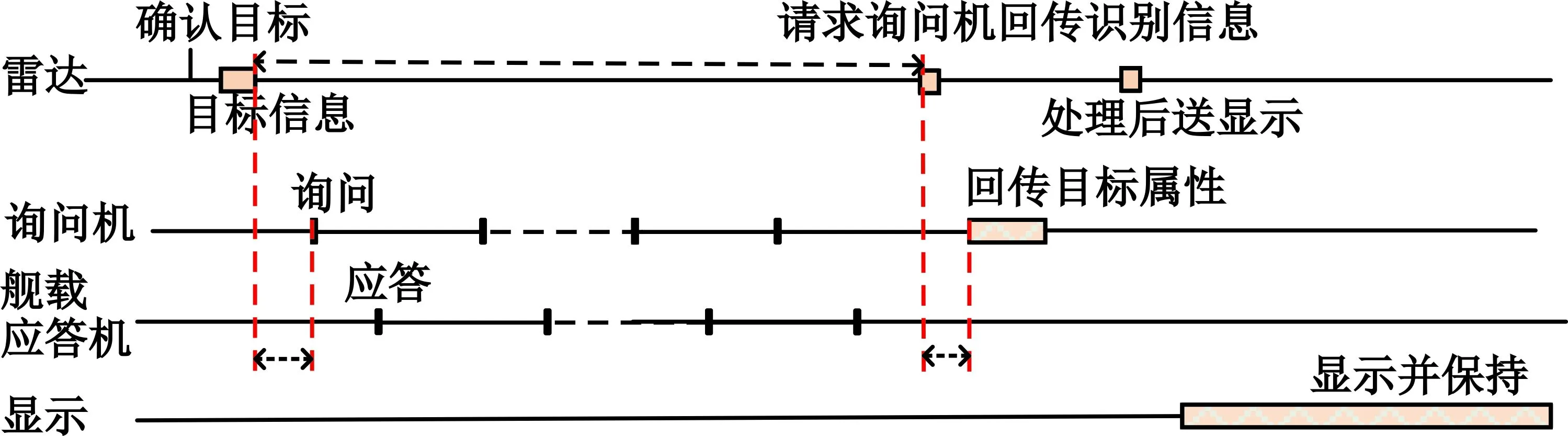
图3 空海敌我识别时序图
2 不同信号链路识别结果分析
假设某海域有3个友方目标(代号A、B、C)和1个敌方目标(代号D),飞机雷达发现了友方目标“A”和敌方目标“D”,在进行敌我识别过程中,不同的信号链路对应的识别结果如表1所示。 “链路正确”是指的在一个时间链路周期内,询问机向“A”目标发出询问信号,收到“A”目标的应答信号,或者询问机向“D”目标发出询问信号,未收到“D”目标的应答信号,同时也未收到其他目标的应答信号。“-”代表未知或未执行。“是否收到应答”是指收到目标“A”或“D”的应答。
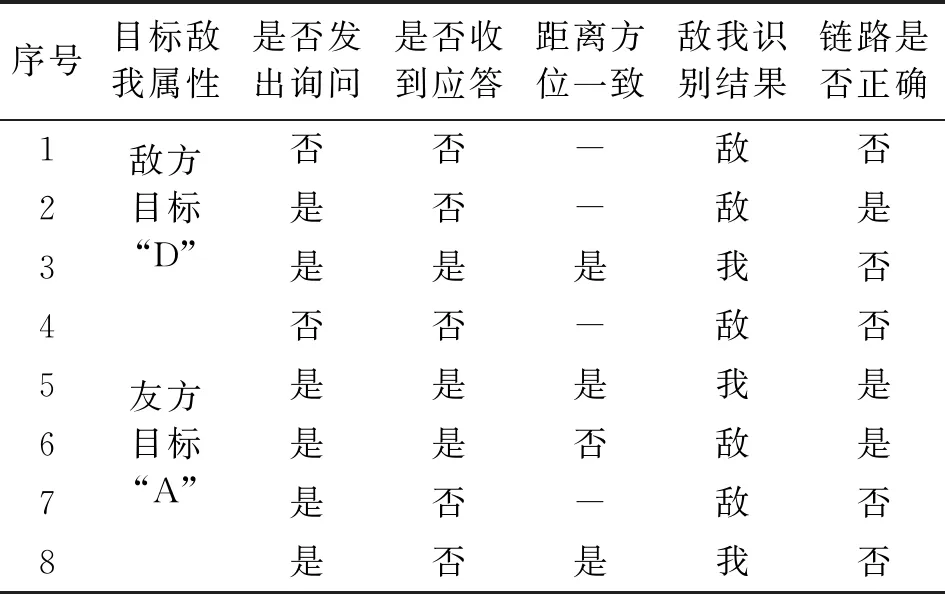
表1 不同信号链路识别结果
序号1至序号3是对敌方目标“D”不同链路对应的识别结果,序号4至序号8是对友方目标“A”不同链路对应的识别结果。
序号1是指询问机未发射询问信号,未收到“D”目标应答信号,距离方位无法判断,属性判断为“敌”,识别结果正确,识别链路错误。
序号2是指询问机发射询问信号,但“D”目标因时隙密码错误,无法接收友方询问信号,未发出应答信号,属性判断为“敌”, 识别结果正确,识别链路正确。
序号3是指在同一个链路周期内,询问机发射询问信号,询问机未接收到“D”的应答信号,但是接收到了友方某个目标的应答信号(A或B或C),且距离、方位一致,属性判断为“我”,识别结果错误,识别链路错误。
序号4是指询问机未发出询问信号,未收到应答信号,属性判断为“敌”,识别结果错误,识别链路错误。
序号5是指询问机发出询问信号,收到“A”目标应答信号,且距离方位一致,属性判断为“友”, 识别结果正确,识别链路正确。
序号6是指询问机发出询问信号,收到“A”的应答信号,因为雷达给出的“A”目标距离方位和询问机解析的“A”目标距离方位不一致,将“A”目标属性判断为“敌”,此时识别链路正确,但是识别结果错误。
序号7是指询问机发出询问信号,未收到“A”应答信号,距离方位一致无法判断,属性判断为“敌”,识别结果错误,识别链路错误。
序号8是指询问机发出询问信号,未收到“A”目标的应答信号,但因为收到了距离方位一致的其他目标应答信号,将其当成了“A”的应答信号,属性判断为“友”,此时识别结果正确,但是识别链路错误。
3 识别链路错误机理分析
飞机对舰船目标进行敌我识别所涉及到了雷达、机载询问机、舰载应答机三种设备,三种设备之间的信号传输与处理时隙精度要求高,一般在微秒级,系统间的协同配合是有效识别的关键所在。图4所示为西方体制Mark XII模式4(保密模式)询问/应答脉冲格式。询问脉冲由同步脉冲(P1~P4)、旁瓣拟制(Side-lobe Suppression,SLS)脉冲(P5)、加密脉冲(P6~P37)组成,加密脉冲由32位随机编码位组成,包含4位延迟位、12位询问确认位和16位填充位。

图4 询问/应答信号码型
应答脉冲由E1~E3组成。应答脉冲的位置由询问码决定。当应答机收到时隙同步脉冲后才会接收32位询问脉冲,首先进行解密处理,提取4位延迟时间数据和12位确认码。询问器收到应答后,对应答信号再进行延迟时间的判别,并与雷达提供的目标距离方位信息进行比对,当正确时才判定此应答为友方。其中,应答延迟时间(单位μs)为
T=(202+4N) 。
(1)
式中:N=0~15,具体值由询问信号的加密脉冲延迟位决定。
由此可见,系统间的工作时序多,询问/应答信号在传输中可能因为外部因素的影响发生畸变、交叠,在接收处理中可能出现次数饱和,导致收发信息误码、无法解析等。
3.1 多径效应造成传输信号通道增加
当飞机高度较低、舰船天线架设较低时,飞机发出的询问信号和舰载应答机发出的应答信号会出现多径效应。多径效应会造成信号传输通道的增加,如图5(a)所示,询问机发出1次询问,目标可能会收到多次询问,应答机发出1次应答,询问机可能会收到多次应答。询问机或应答机同时处理多通道数据时,可能会发生处理能力饱和、码间串扰、数据通道堵塞的现象,接收不到询问或者应答信号。多径效应造成的第二种情况如图5(b)所示,如果区域内有2个目标,询问机对A目标的询问可能会因多径效应使信号传输方向改变,使B目标接收到,B目标发出的应答信号又因为多径效应被询问机接收到,当成A目标的应答,导致识别链路错误。
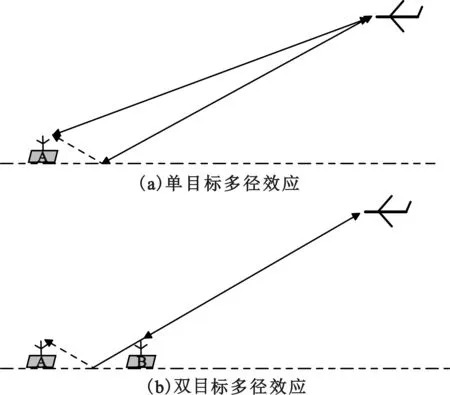
图5 询问/应答信号传输多径效应
3.2 海面复杂电磁环境造成信号传输损耗
造成海面复杂电磁环境效应的主要因素是海面复杂气象环境和地形特征[7]。海的组成波是由重力波到毛细波之间的波生成的,海浪、浪涌和风速、海面表张力等造成的动态变化海表面多尺度结构特征,导致了电磁信号特殊传播特性,使海杂波呈现时变、动态、非高斯的特点,不同海况对电磁波后向散射强度的影响非常明显,海陆交界处形成的大气湍流杂波多普勒频移较大,大气传播特性异常。这些复杂电磁效应特性会影响着询问与应答信号幅值、频率稳定、极化形式、信杂比,可能会导致信号码型畸变或达不到信号处理门限值而不能被对方接收处理。
3.3 询问/应答机天线方向不平行造成信号极化损失
飞机在空中对海面舰船进行识别时,飞机处于高速机动状态,飞行速度快,飞行姿态也会不断变化。舰船在海浪中行驶,相对飞机虽然速度不高,但若在海浪中行进,舰身会处于摇摆姿态。飞机平台与舰船的高相对速度与不同姿态,会导致敌我识别系统收发天线的姿态变化。机载询问机天线常采用垂直极化,舰载应答机天线常采用垂直极化,当飞机和舰船姿态发生相对变化时,两种天线可能不是平行关系,而是交叉关系。如图6所示,当询问机天线与应答机天线处于不同角度时,造成的极化方式失配一般在0~3 dB,甚至可能会超过3 dB[8],进而会带来信号接收功率的损耗,使信号低于询问机和应答机的处理信号门限值,导致不应答。

图6 询问机与应答机天线角度关系
3.4 雷达天线与询问天线波束中线不重合造成目标方位不匹配
如图7(a)所示,正常情况下雷达天线和询问机天线的波束中心轴线重合(询问天线和差处理后),目标同时处于雷达天线和询问机天线波束辐射范围。但由于飞机姿态变化或询问天线性能的下降,可能使会使雷达天线和询问机天线的波束中心轴线不重合,两者中心轴线出现一定的角度偏差,当偏差较大时会出现如图7(b)所示的情况,雷达测量目标角度与询问机测向角度不统一,使雷达提供的目标角度与询问机解析的目标角度不一致,导致目标应答信号被询问机当作其他目标的应答而被剔除。

图7 雷达天线与询问天线波束中心线重合误差
3.5 距离角度分辨力低造成的误识别
如图8(a)所示,友方目标“A”和目标“D”方位一致,但是距离不同,如果两者距离相近,且低于询问机的距离分别辩率,询问机在对“D”进行询问时,询问信号被“A”接收到,“A”发出的应答信号被询问机接收到,由于目标“A”和“D”的距离较近,询问机把“A”的应答当成了“D”的应答,造成误识别。另一种情况如图8(b)所示,当目标“A”和目标“D”距离相近但方位不同,如果两者的方位角度差低于询问波束的角度分辨率,询问机在对“D”目标进行询问时,询问信号会被“A” 目标接收到,“A” 目标发出的应答信号被询问机接收到,由于“A” 目标和“D”目标的距离角度较近,询问机把“A” 目标的应答当成了“D”目标的应答,造成误识别。

图8 目标距离/角度关系
3.6 电子对抗环境下链路被干扰造成的误判
随着敌我识别系统的广泛应用,敌我识别对抗技术也相继发展起来[9],目前文献公开的敌我识别对抗系统主要有三种:美国的AN/ALQ-108敌我识别干扰吊舱、西班牙的“塔兰”(TARAN)系统和“尼德简姆”(NIDJAN)系统。Mark XII系统采用单一固定频点发射询问/应答信号,应答机天线为全向天线,接收处理询问信号按照时间先后进行,信号先到先答,不能同时处理多个同时到达的询问信号,询问/应答机灵敏度范围有限[10]。针对这些技术缺陷可对其进行噪声压制干扰、应答机占据干扰、高重频脉冲干扰,主要机理如下:一是在询问机对“友方”目标进行多次询问时间段内,模拟对方询问信号进行多次“见缝插针”式询问,使对方应答机在规定的时间内不应答或使系统处理达到饱和,造成询问机收到“友方”应答的统计概率达不到要求;二是通过侦查对方询问信号重复频率,将干扰询问信号重频调整至与对方询问信号一致的重频上,并使干扰询问信号时间超前于真实询问信号,使干扰询问进行“定点抢问”式询问,每次询问抢在真实询问信号前面,使其对方应答机无法响应己方询问机的询问。另外,在上述两种干扰技术的基础上,还可以在干扰询问信号中加入旁瓣抑制脉冲,使旁瓣抑制脉冲幅度大于或等于询问信号脉冲幅度,应答机接收到该干扰询问信号,会误判断为询问机的旁瓣询问信号,应答机就不会做出应答,而且会产生一段时间的抑制(在此过程中不接收处理任何信号),从而接收不到己方的询问信号。
4 结束语
海战场环境下飞机对海目标敌我识别正确率的提高是减少误袭误伤的重要手段,它关系着对敌打击质量和己方装备与人员的生命安全,决定着军事行动的成败。因此,通过研究空海识别错误时的信号链路机理,针对性地采取技术措施和改进系统使用方法,避免各种不识别和误事别情况的发生。在多兵种空海武器平台联合演练时,必须借鉴外军敌我识别系统训练经验,将空海识别能力验证作为一项重要工作对待,查找不同平台不同情况下敌我识别系统使用中存在的问题,制定应对举措和科学的战术战法,以提高未来“空海一体化”作战的打赢能力。