电液伺服系统模糊PID控制器设计
2021-07-02陈亮洪震
陈亮,洪震
(泸州职业技术学院机械工程学院,四川泸州,646000)
0 引言
机电液一体化系统广泛应用在需要力矩较大的场合,如各自机械加工机床、航天器械、工程机械、农业机器等。但是还有一些场合对运动或动力精度要求较高,在这些场合精度较低的机电液系统就无法达到要求,而电液伺服系统恰好弥补了这个空缺[1-2]。电液系统一般包括比较器、放大器、转化元件、执行器、传感检测元件等。设计电液系统时可以用AMESim软件对电液伺服系统进行建模,设计控制算法,优化参数,以达到实际需要的运动精度[3]。AMESim软件中有机械系统、流体系统、信号处理系统等[4]。其中流体系统包括液压泵、液压阀、液压缸等。液压泵有定量泵、变量泵、柱塞泵等。液压阀包括单向阀、溢流阀、三位四通方向阀、二位四通方向阀、电动方向阀、液动方向阀等。液压缸包括单作用液压缸、双作用液压缸、带负载的液压缸等。信号处理系统包括信号发生器、传递函数、放大器、函数块、滤波器等。其中信号发生器可以输出方波、正弦波、三角波、锯齿波、白噪声等。传递函数是系统复数形式的数学模型。放大器对信号按比例进行放大。函数块可以自定义函数。滤波器可以设置为低通滤波、高通滤波、带通滤波等。AMESim包含多种不同领域的元件模块,能够轻松直观的搭建系统的仿真模型,而且修改模型参数也非常便利,避免了复杂繁琐的数学公式,更加注重系统的物理特性和数学属性。
Simulink环境是图形窗口式的,可以用来搭建连续或离散系统的数学模型。可以利用Simulink环境建立PID控制算法,再和AMESim联合仿真[5]。具体的先编译接口块生成接口文件,再用接口文件连接AMESim和Simulink即可。在控制算法方面,随着数字计算机的发展,经典的数字PID控制算法被应用于各种场合,已经非常成熟。目前有有关PID算法的研究正朝着智能化、鲁棒化、先进化方向发展。如曹昌勇等[6-7]在汽车减振性能检测方面,运用模糊PID技术,使系统达到了较高的稳定性。
1 电液伺服系统数学模型
电液伺服系统的主要元件为伺服液压阀和伺服液压缸。伺服液压阀可以简化为二阶振荡环节。其传递函数如式(1)所述。

其中,K为伺服液压阀的流量增益,wn为伺服阀的固有频率,ζ为伺服液压阀的阻尼比。伺服液压缸的传递函数为

式中,Ap为活塞有效面积;βe为有效体积弹性模量;F为负载力;K为负载弹性刚度;Kq为流量增益;Bp为粘性阻尼系数;mt为活塞及负载折算到活塞上的总质量;Kce为总流量-压力系数。
2 模糊PID控制器设计
传统PID控制器器主要包括比例、微分和积分项,其控制规律为

传统的PID控制依赖于精确的数学模型,但实际系统的参数及结构并不是固定不变的,且系统还会受到外部扰动的影响,因此传统的PID无法满足参数和结构变化的系统。为弥补传统的PID的本文设计了一种模糊PID控制算法。模糊控制是根据人们的经验进行推理表达,主要包括模糊化、模糊推理、去模糊化三个部分。模糊推理是模糊控制的关键。模糊PID是模糊控制理论和PID控制的结合,本质上是通过模糊控制规则来在线自我调整Kp、Ki、Kd,即系统误差、误差变化率与PID控制器的三个参数Kp、Ki、Kd对应关系。
如图1所示本文采用二维模糊控制器,即模糊控制器的输入分别是液压缸的位移误差和液压缸的位移误差的变化率,r为液压缸理想的位移,y为实际的位移。模糊集均为{负大、负中、负小、零、正小、正中、正大 },记为 {NB、NM、NS、Z、PS、PM、PB}。
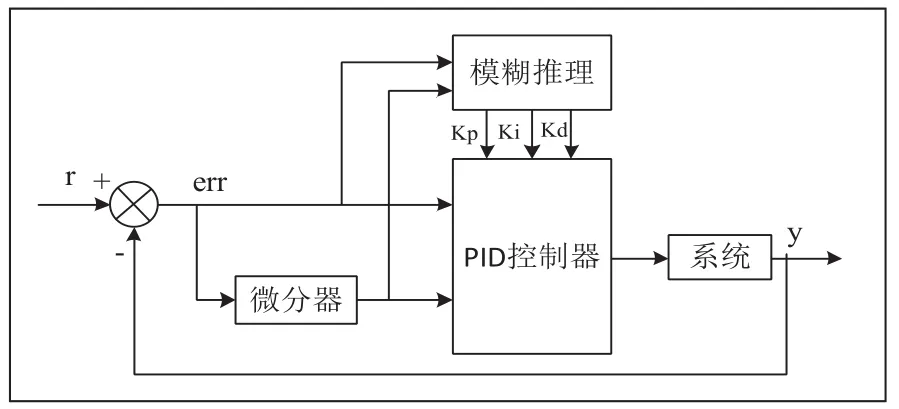
图1 模糊PID控制器
模糊推理的依据模糊控制规则表如表1所述。

表1 模糊控制规则表
3 电液伺服系统的仿真
图2为典型电液伺服系统AMESim模型。其中液压泵为定量泵。液压阀为三位四通液压阀。液压缸为带负载的单作用液压缸。液压缸的位置由位移传感器测量。传感器的测量结果输入到比例阀,信号经过比例放大,输入到搭建好模糊PID控制算法的Simlink模型。模型的输出驱动伺服阀。

图2 电液伺服系统AMESim模型
设置液压缸的运动目标为移动1m。输入各模型参数,运行Simulink模型。运行结果如图3所示。
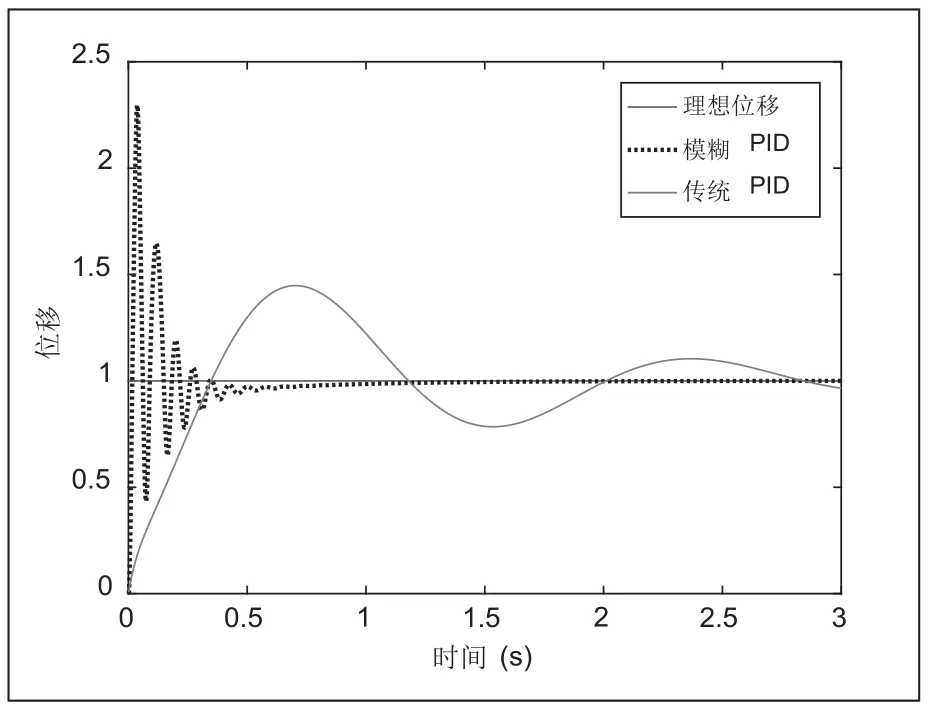
图3 液压缸位移控制效果
从图3可以看出液压缸实际运动从初始0位置快速上升到目标位置1m。模糊PID控制在达到目标位置前有波动,但很快可以达到目标位置。且进入稳态阶段后系统的稳定性也非常可靠。但传统的PID控制达到目标的位置的时间较长。综上所述,相比于传统PID,模糊PID在快速性和稳定性方面更加优良,本设计达到了预期的设计目标。
4 结束语
本文运用AMESim软件搭建了电液伺服系统的模型,在Simulink中设计模糊PID控制算法,通过接口技术将AMESim模型与控制算法相连接。通过调整算法参数使系统达到了预期的控制目标,为电液伺服系统的建模和控制提供了理论依据,可作为其他系统控制的参考。
