基于定子绕组温度感知与模糊PI策略的感应电机矢量控制方法
2021-07-02孙勇,张伟
孙 勇,张 伟
(1.中国电子科技集团第四十八研究所,湖南 长沙410111;2.上海航天控制技术研究所,上海201109)
近年来,随着节能环保国家战略的不断推进,感应电机在电动汽车和轨道交通驱动系统中获得了越来越多的应用[1,2]。为了保障电动汽车或电力机车的加速和载重性能,感应电机需要具备较高的间歇性过载能力[3,4]。但在成本、体积和重量等指标的约束下,电机过载会导致其定子绕组温度急剧上升,严重威胁电机运行安全性[5-7]。
当前,感应电机通常采用矢量控制策略进行转矩和转速控制,而其最大过载能力主要由转矩电流分量指定。由于传统矢量控制策略未考虑电机热安全性对控制效果的影响,故电机的最大转矩电流分量通常依赖经验确定,或被限制在一个静态保守值上[8]。这种转矩电流的限制方式存在盲目性,并且会因忽略绕组的热惯性而极大程度低估电机真实过载能力。
在此背景下,一种基于定子绕组温度感知的感应电机矢量控制方法被提出[9]。该方法能够根据电机定子绕组温度反馈,对绕组温度进行控制,并依据控制结果对电机转矩实施动态限制,从而在保障电机热安全性的同时,实现电机过载能力的动态调节。与传统的矢量控制策略相比,该方法能够在不改变现有电机散热结构和冷却方式的前提下,利用绕组热惯性,动态提升电机的短时过载能力,具有重要的理论意义和工程实用价值。
然而,在现有基于定子绕组温度感知的感应电机矢量控制方法中,绕组温度控制通常采用经典PI策略实现[10,11]。该策略具有原理简单和易于实现等优势,但当控制对象存在非线性或大惯性时,其控制性能往往难以满足要求。由于电机内部结构复杂,且各部件材料存在较大热容,因此定子绕组温升正是一个具有非线性和大惯性的过程,故经典PI策略无法保障绕组温度控制的动态特性。受此影响,传统的基于定子绕组温度感知的感应电机矢量控制方法难以提供良好的温度控制动态性能。这不仅可能降低定子绕组的热安全性,还将影响了电机过载能力的挖掘力度。
为克服上述问题,本文提出一种基于定子绕组温度感知与模糊策略的感应电机矢量控制方法。该方法利用模糊策略改善了绕组温度控制的动态特性,达到进一步提升感应电机短时过载能力和热安全性的目的。在电机堵转和动态工况下进行了试验,相关结果表明了所提方法的有效性。
1 传统基于绕组温度感知的矢量控制方法
1.1 感应电机数学模型与矢量控制策略
依据坐标转换原理,感应电机在 两相旋转坐标系下的电压方程和磁链方程可分别表达为:

式(1)、式(2)中,u、i、R和L分别表示电机电压、电流、电阻以及电感;下标s和r分别表示定子和转子;下标d和q分别表示两相同步旋转坐标系的坐标轴;p=d/dt表示微分算子;ωe和ωs1分别表示感应电机的同步角速度和转差角速度;Lm、Ls和Lr分别表示互感、定子绕组自感以及转子绕组自感;ψs和ψr分别表示定子磁链和转子磁链。
感应电机的电磁转矩Te可表达为:

式(3)中,np表示感应电机的极对数。
将式(2)代入式(3)可得:

由式(1)和式(4),并结合转子磁场间接定向原理,可得矢量控制中磁链观测器的表达式:

其中,ωr为转子角速度。
结合式(1)至式(5),可得图1所示的感应电机矢量控制框图。其中,模块abc→αβ,αβ→dq和dq→αβ分别表示Clarke变换,Park变换和Park逆变换;SVPWM模块表示空间矢量调制策略;Usa*和Usβ*为两相静止坐标系下电压参考值;Usd*和Usq*为两相旋转坐标系下电压参考值;isq*和isd*分别为转矩电流和励磁电流参考值。
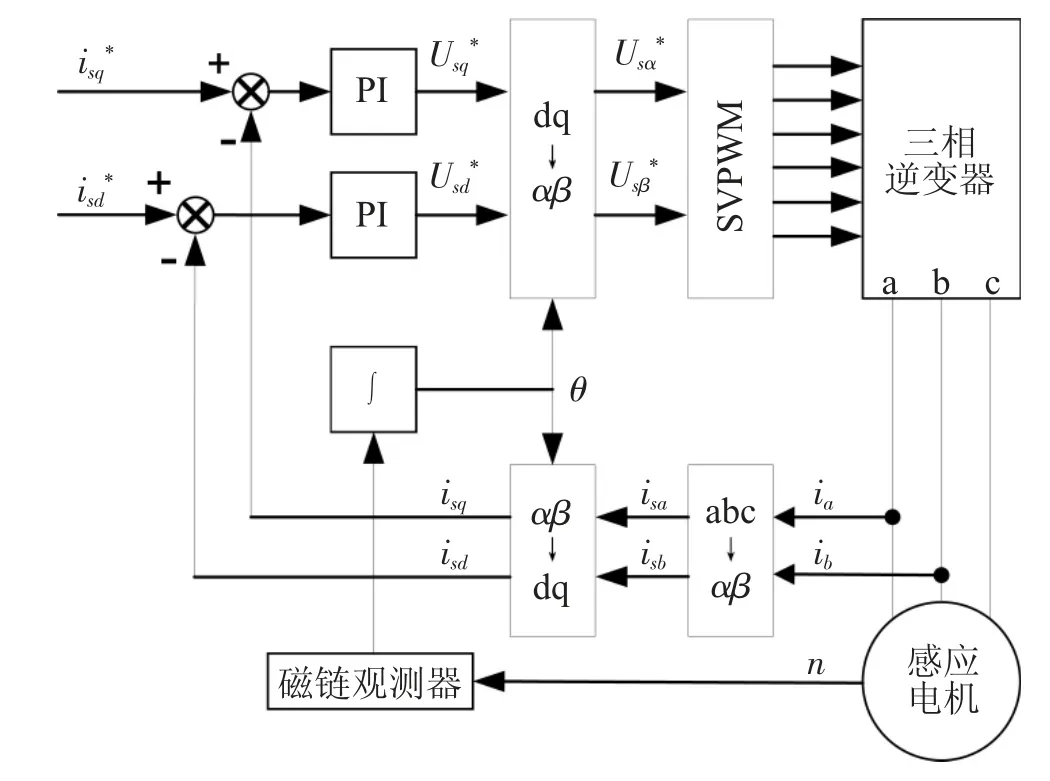
图1 感应电机矢量控制策略框图
通过磁场定向后,电机定子的励磁电流分量与转矩电流分量完全解耦,可分别通过电流PI实现独立控制。因此,空间矢量控制策略的本质是将感应电机等效为直流电机方式进行控制,以提升转矩或转速控制性能[12]。
1.2 基于绕组温度感知的矢量控制原理
在传统矢量控制策略中加入电机定子绕组温度PI控制,便可得到基于定子绕组温度感知的感应电机矢量控制策略,如图2所示。图2中,Tw*为定子绕组温度参考值,也是最大允许的绕组温度值;Tw为定子绕组温度感知量,也是绕组温度控制的反馈值;|isq|lim为温度控制环节的输出值,同时作为矢量控制中转矩电流参考值isq*的限定值;|isq|max为系统过载时的最大允许转矩电流值,用于限制|isq|lim。
由图2可得该矢量控制策略的基本原理:温度PI闭环控制器根据电机定子绕组温度反馈,对绕组温度进行控制,并依据控制结果对电机转矩实施动态限制。当绕组感知温度Tw小于其参考值Tw*时,温度闭环不断增大限制值|isq|lim,直至|isq|max。这将允许系统增大转矩电流的输入,提升电机的短时过载能力;反之,当绕组感知温度Tw大于或接近其参考值Tw*时,温度闭环输出较小限制值|isq|lim,直至温度达到稳定。这样可以避免绕组持续性超温,提升电机的热安全性。

图2 基于定子绕组温度感知的矢量控制原理框图
因此,与传统矢量控制方法相比,基于绕组温度感知的矢量控制具有明显优势。但该方法目前利用经典PI策略进行绕组温度控制,无法保障控制结果的高动态性能,进而影响电机过载能力和热安全性的提升效果。
2 基于绕组温度感知与模糊PI控制策略的矢量控制方法
2.1 模糊PI控制策略的原理
模糊PI控制是利用模糊规则调整PI参数的一种控制策略,具有良好动态特性和鲁棒性,在工业控制过程中被广泛采用[13,14]。与经典PI控制器相比,模糊PI控制器对非线性、大时滞和大惯性的控制对象而言,可以获得更加理想的控制效果[15,16]。
模糊PI控制器由模糊控制器和PI控制器复合构成,如图3所示。其中,和 分别为模糊PI控制器输入量和输出量。y和u分别为控制偏差及偏差的变化率,同时也是模糊控制器的输入量;E和EC分别为e和ec的模糊化结果;△Kp和△Ki分别为PI控制器比例和积分系数的修正值,通过将和按照模糊规则进行模糊推理和解模糊后得到;△Kp0和△Ki0分别为PI控制器比例和积分系数的原始值。

图3 模糊PI控制器原理图
在上述模糊策略下,PI控制器的比例和积分系数最终值Kp和Ki可表达如下:

其中,{e,ec}P和{e,ec}I分别代表比例和积分系数修正值的模糊运算过程。
依据图3,可得模糊PI控制器的完整设计流程,如图4所示。

图4 模糊PI控制器设计流程示意图
2.2 所提矢量控制方法原理
在传统基于定子绕组温度感知的感应电机矢量控制方法上,引入模糊PI控制器来代替经典PI控制器,便可得到本文所提的矢量控制方法,如图4所示。由图4可见,本文所提方法通过定子绕组温度参考值Tw*和反馈值Tw,得到控制偏差e及其变化率ec。再经由模糊PI控制和饱和环节得到转矩电流限定值|isq|lim。由于模糊PI控制能够改善绕组温度控制的动态特性,故可以进一步提升感应电机的短时过载能力和热安全性。
在本文模糊PI控制器中,输入和输出变量的模糊集合选取如下:

其中:NB、NM、NS、Z、PS、PM和PB分别表示输入和输出变量对应负大、负中、负小、零、正大、正中和正小的模糊取值。表1给出了上述模糊集合对应的模糊规则表。

表1 模糊规则表
依据本文控制对象特性,将输入和输出变量的模糊论域取值为[-3,3]。那么依据模糊集合,模糊论域可离散化为7个状态,分别为:-3→NB,-2→NM,-1→NS,0→Z,1→PS,2→PM,3→PB。图5给出了该模糊论域下的输入和输出变量隶属度函数。
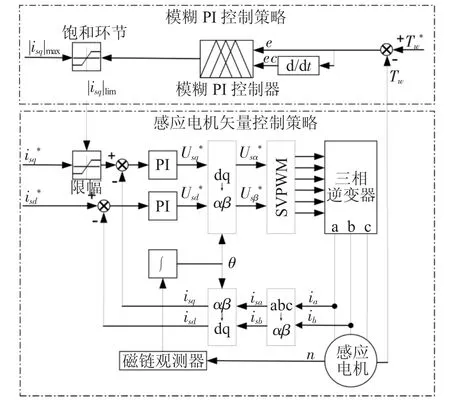
图5 基于模糊PI控制策略的矢量控制方法原理框图

图6 隶属度函数
3 试验平台设计
为了验证所提方法的有效性和优势,搭建了如图7所示的试验平台。该试验平台由直流稳压电源、电机测试控制柜、电涡流测功机、感应电机、电机驱动器、串口模块和PC机构成。其中,直流稳压电源为驱动器和电机提供72 V直流电压。电机测试控制柜可下发测试命令至电涡流测功机,对待测感应电机施加不同制动转矩。电机驱动器带有基于所提控制矢量控制方法的驱动程序,可控制电机运行。试验过程中的电机电流、转矩和温度等数据,通过串口模块上传至PC机中,以供存储和分析。

图7 试验平台实物图
试验平台中,采用型号为HPQ4-60AG的感应电机作为被测电机。该电机通常在微型电动汽车中使用,带有64线编码器。表2列出了该电机的主要技术参数。

表2 感应电机参数
4 试验验证与分析
4.1 电机堵转状态下的方法有效性验证
首先在电机堵转状态下,对所提方法进行有效性验证,并和传统基于定子绕组温度感知的空间矢量方法进行对比。试验中,设Tlim*为定子绕组最高运行温度,取值80℃;另外,最大允许转矩电流设定为280 A,试验总时长设定为600 s。
为了在某一基准下进行比较,图8给出了定子绕组温度控制超调量一致时的两个方法试验结果。其中,左列图像为传统方法所得结果,右列图像为本文所述方法所得结果。从图8中可以看出,两类方法均可令电机电流由额定值56 A提升至280 A,实现电机容量的5倍过载运行。在此过载电流的作用下,电机的电磁转矩最大可达40 N·m。然而,由于传统方法采用经典PI策略控制定子绕组温度,故在相同超调量下,绕组温度控制的快速性明显低于本文所提方法。受此影响,传统方法所得电机最大过载电流持续时间仅为40 s左右。而本文所提方法所得最大过载电流可持续约110 s,是传统方法最大过载时间的2.75倍。这表明在模糊PI控制策略的作用下,本文所提方法具有更强的电机短时过载能力。

图8 相同温度控制超调量下的两种方法实验结果
图9给出了两个方法在定子绕组温度控制快速性相同条件下的试验结果。同样,左列图像为传统方法所得结果,右列图像为本文所述方法所得结果。从图9中可以看出,在相同的控制快速性下,传统方法所得绕组温度的超调量可达10%左右,而本文所提方法所得绕组温度超调量仅为1%。这表明在模糊PI控制策略的作用下,本文所提方法能够更加良好的保障电机热安全性。

图9 相同温度控制快速性下的两种方法实验结果对比
上述试验结果均表明,模糊PI控制策略能够有效改善定子绕组温度控制的动态特性,因此本文所提方法进一步提升了感应电机短时过载能力和热安全性。
4.2 电机运行状态下的方法有效性验证
为了进一步验证所提方法有效性和优势,在电机运行状态下进行相关试验。试验总时长为1 000 s,分为三个时段。时段I为0~300 s,时段II为300~600 s,时段III为600~1 000 s。时段I内和时段III内的转矩电流参考值均为280 A,即期望电机在该时段内过载运行。而时段II内转矩电流参考值降为95 A,故该时段内的绕组温度可逐步降低,为时段III提供了过载的前提条件。
对应上述3个时段,图10(a)给出了传统方法所得结果,图10(b)给出了本文所述方法所得结果。由图10可见,在时段I内和时段III内,由于典型PI控制器的动态特性不佳,传统方法所得绕组温度控制结果均存在明显超调。尽管温度超调意味着过载电流持续时间增大,电机转速提升,但却严重影响了电机热安全性。而本文方法通过模糊PI策略改善了绕组温度控制动态特性,故在全试验时段内均未出现明显的绕组温度超调现象,电机的转矩电流持续时间和转速始终能够保持在合理的变化范围之内。因此,本文所提方法可更加准确提升电机的短时过载能力,充分保障电机的热安全性。

图10 转矩电流动态给定条件下两种方法实验对比结果
5 结 论
本文在传统基于定子绕组温度感知的矢量控制方法基础上,通过引入绕组温度的模糊PI控制器,提出了一种感应电机新型矢量控制方法。实验结果表明,相对传统方法,本文所提方法能够有效改善电机定子温度控制的动态性能,从而进一步提升感应电机的短时过载能力和热安全性。
