V2V环境下基于改进OV模型的交叉口通行效率分析
2021-07-02梁文丽刘海青
徐 伟,梁文丽,刘海青
(山东科技大学 交通学院,山东 青岛 266590)
自20世纪初起,随着机动化和城市化水平的快速提升,城市道路交通压力不断增大,交通拥堵现象经常发生,交通流中车辆的运行独立性逐渐变小,车辆之间的跟驰行为成为当前城市道路上的基本交通行为。在交叉口车辆通行过程中,车辆的微观跟驰行为对道路的通行能力产生重要影响。基于微观跟驰行为对道路通行能力进行分析,结果更加客观合理。
传统道路交通环境下,驾驶员并不能实时获取交叉口信号灯的运行状态和邻接车辆的运动情况等信息,只能根据前车的运行状态做出判断和决策。国内外很多学者对考虑驾驶员反应延迟的跟驰模型进行了研究并取得了阶段性的研究成果。Jin等[1]提出基于车头距和速度差的延迟反馈控制来确保考虑驾驶员反应延迟的模型稳定性。Li等[2]研究了考虑驾驶员反应延迟的跟驰模型的一般非线性稳定策略。Zhou等[3]构建了考虑驾驶员反应延迟的全速度差模型并进行非线性分析。此外,还有很多学者从驾驶员反应延迟时间对交通流的影响角度展开了研究[4-6]。上述研究绝大部分是在传统环境下考虑驾驶员获取信息的滞后性基础上进行研究,尽管上述研究取得了一定的成效,但由于传统条件下驾驶员获得信息具有滞后性,限制了驾驶员获取道路交通信息。
在车-车通信(vehicle-to-vehicle,V2V)环境下,红灯期间排队等待的驾驶员可以利用无线通信网络,实时获取周围邻接车辆的运动信息和前方交叉口信号灯的灯态,进而提前操控车辆,在红灯起亮前较短时间内,利用停车间距提前启动,突破传统概念上的最小安全距离,实现车辆预加速,跟车行为发生了实质性的变化,并进一步影响车队的消散状态。V2V环境下,车辆与车辆之间的相互通信形成了强大的共享信息网络[7],充分利用车辆的运动状态、路况等信息能够辅助驾驶员进行提前决策,进而对驾驶行为产生影响。不少学者从宏观角度揭示引入智能电子设备后的交通流特征[8-11]。Kuang等[12]考虑平均速度效应,提出一种扩展的多预期平均速度模型。华雪东等[13]建立了考虑V2V技术的改进Newell模型,研究V2V通信技术对交通运行的影响。Peng等[14]结合V2V通信技术,提出一种跟车模型的延迟反馈控制方法。Sun等[15]考虑V2V通信技术背景下前方两辆连续车辆的影响,提出一种改进的跟车模型。Wang等[16]提出一种扩展的跟车模型,分析V2V通信技术对无信号交叉口微观驾驶行为的影响。
1995年Bando[17]提出的优化速度(optimal velocity,OV)模型是描述车辆动力学行为的基础模型之一,由此延伸出广义优化速度模型[18]、全速度差模型[19]、最优速度差模型[20]等一系列的优化模型,对交通流微观行为分析具有重要的价值。本研究基于V2V环境下改进的OV模型,对比考虑驾驶员反应延迟的跟驰模型和传统跟驰模型,仿真分析了其对交叉口通行效率的影响。结果表明,在驾驶员提前反应条件下,交叉口的通行效率得到了显著提升。
1 模型建立
1.1 V2V环境下改进的OV模型
驾驶员通过V2V设备获取前方交通流的实时状态后,在前车启动之前会有提前反应时间tf,基于此,设计了考虑驾驶员反应提前时间的改进OV跟驰模型:
(1)
其中:α表示驾驶员敏感系数;vn(t)为n车(n=1,2,…,N;N为总车辆数)在t时刻的实际速度;Δxn(t)为n+1车与n车在t时刻的车头间距;tf表示驾驶员提前反应时间。优化速度V(Δxn(t))亦可以被称为期望的稳定速度,并服从如下条件:
(2)
式中,hc表示安全间距,vmax表示最大速度,V(Δxn(t))的双曲正切函数可以用式(3)来表示:
(3)
1.2 改进模型在信号交叉口处的应用
考虑驾驶员反应提前时间的改进OV模型在信号交叉口处的应用可以分为3个阶段:
1)初始状态
车队处于停车状态,驾驶员通过V2V设备获取与前车之间的车头间距Δxn,安全车距为hc,如图1所示。

图1 初始状态车队位置、安全车距示意图
2)后车预加速
在绿灯启亮时刻g0前的较短时间tn内,停车等待车队最后1辆车的驾驶员根据V2V设备的提示开始提前启动车辆,经过时间间隔tf后,当前车的前一辆车开始启动,依次向前传递至第一辆车启动。位置更新如公式(4)所示。
(4)
式中ti为更新时间间隔。
3)绿灯启亮时刻的跟车行驶状态
在绿灯启亮时刻,信号交叉口的第一辆等待车的车头间距瞬时增大,由式(3)可知,此时第一辆车此时的最优速度为最大速度,即:
v1(g0)=vmax。
(5)
2 通行效率分析
选取交叉口排队消散速率和直行车道通行能力为指标,分别对在交叉口处应用传统OV模型[17]、考虑反应延迟的OV模型[17]、考虑反应提前的改进OV模型的通行效率进行评价。
2.1 消散速率
利用传统模式下交通波的波速表达公式来计算交叉口处交通波的消散速率:
(6)
式中:uw为交叉口处交通波的消散速度,为矢量;u1为绿灯启亮前的车队速度;k1为绿灯启亮前的车队密度;u2为绿灯启亮后的车队速度;k2为绿灯启亮后的车队密度。
更直观的示意如图2所示。

图2 车队消散速率示意图
在传统OV模型下,u1=0,k1>k2;
在考虑驾驶员反应延迟的OV模型下,u1=0,k1>k2;
在考虑驾驶员反应提前的改进OV模型下,u1>0,k1>k2。
考虑到整个车队的波动传播是一个由头车到尾车的逐次传播过程,整个车队的车辆状态传播速度可表示为车队中两辆相邻车辆间的运动状态传播速度的平均值,即
(7)
2.2 直行车道通行能力
交叉口直行车道通行能力用以下公式来计算:
(8)
式中:Tc表示信号周期,s;tg表示对应相位的绿灯时间,s;t0表示绿灯亮后第一辆车启动通过停车线的时间,s;ti表示车辆通过停车线的平均时间,s;φ表示折减系数,可取0.9。
传统OV模型下,根据经验数据,全部为小型车组成的车队,ti取2.5 s;全部为大、中型车组成的车队,ti取3.5 s;全部为拖挂车组成的车队,ti取7.5 s。
绿灯启亮后同时联动的车辆启动模式下,每辆车的通过停车线的时间组成等差数列:
(9)
考虑驾驶员反应提前的改进OV模型下,由于车辆提前启动,ti需实际计算:
(10)
3 仿真分析
对信号交叉口处单直行车道排队车辆跟车行为进行仿真分析,车辆队列中共包含5辆车,采用对比策略,在不同的参数条件下对比分析模型的性能优势。车辆分布及运动情况遵循如下假设:
1)系统初始时刻,信号灯为红灯,此时停车线前停有5辆车,车辆间的车头间距为Δxn;当t=g0时,信号灯由红灯转为绿灯;
2)假设车辆性能一样,在仿真时将车辆视为质点。
3.1 消散效率分析
设置初始条件hc=4 m,vmax=20 km/h,Δxn(0)=7 m,tf=2 s,td=2 s,k1取绿灯启亮前的最小密度,u2取绿灯启亮后的最大速度。在3种模型下,车辆的参数变化如图3所示。表1为所设条件下不同模型下车队参数的具体数值。

图3 三种模型下车辆速度变化图
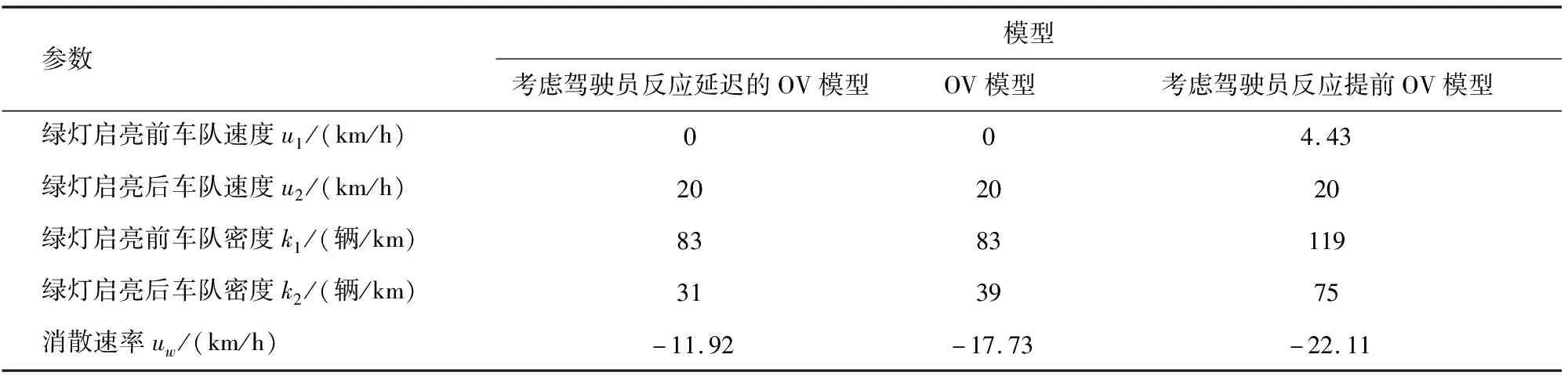
表1 不同模型下车队的参数值
对比图3中3种模型的时间速度图像,考虑驾驶员反应提前的OV模型下,在绿灯启亮前,待行车队已经有一个较小的初速度,随着前车的启动,后车的速度会有一个小的振荡。在绿灯启亮后,第1辆车呈现加速度不断减小的加速运动至最大速度。跟驰车队的行驶速度呈现先振荡后加速度不断减小的加速运动至最大速度。对比跟驰模型及考虑反应延迟的跟驰模型,考虑反应提前的OV模型的车队系统恢复稳定前车辆之间的速度差远小于考虑反应延迟的OV模型和OV模型,提高了交叉口处的通行效率。
由表1可知:V2V背景下,驾驶员可提前获取交叉口完备的道路信息及临接车辆信息,提前启动车辆,因此V2V车队在绿灯启亮前有小的向前的初速度,绿灯启亮前车队的密度大于传统条件下的车队密度。绿灯启亮后,V2V车队快速而紧凑的通过交叉口,交通流稳定后的车队密度仍大于传统条件下的车队密度。由式(6)进行计算可知,交叉口处V2V车队的消散速率uw为22.11 km/h,高于OV模型的17.73 km/h和考虑反应延迟OV模型的11.92 km/h。
3.2 直行车道通行能力
分析交叉口直行车道的通行能力,设置初始条件hc=4 m,vmax=20 km/h,Δxn(0)=7 m,tf=2 s,td=2 s;设置车辆位置为车辆到停车线之间的距离;取信号周期为180 s,其中绿灯相位时长为60 s。
3种模型下车辆的时间-位置图像如图4所示,每辆车通过停车线的时间如表2所示,直行车道的通行能力如表3所示。

图4 不同模型下车辆位置变化图
对3种模型下车辆位置变化进行对比分析,传统模型下的车队车辆间的间距较大,V2V车队由于在绿灯启亮前形成“聚集”现象,拥有小的初速度,车辆间密度较大,较为紧凑。
结合表2和图5,对比分析3种模型下车辆通过停车线的时间。考虑驾驶员反应提前的OV模型时,绿灯启亮后7.1 s,最后1辆车通过停车线。对比OV模型,绿灯启亮后最后1辆车通过停车线的时间为15.1 s,效率提升了52.98%。对比考虑反应延迟的OV模型,绿灯启亮后最后1辆车通过停车线的时间为22.6 s,效率提升了68.58%。

图5 不同模型下车辆通过停车线的平均时间对比图

表2 不同模型下车辆通过停车线的时间表
将不同模型下车辆通过停车线的平均时间代入公式(8)中,求得不同模型下直行车道的通行能力如表3所示。

表3 不同模型下直行车道的通行能力
相较于OV模型下直行车道的通行能力152 pcu/h,承载V2V车队下直行车道的通行能力为323 pcu/h,通行能力提高了112.5%;但相较于考虑驾驶员反应延迟的OV模型下直行车道的通行能力为108 pcu/h,承载V2V车队的直行车道通行能力提升了298.15%。
4 结论
本研究在考虑驾驶员反应提前时间的改进交通流跟驰模型的基础上,研究了改进交通流跟驰模型在交叉口处的通行效率。通行效率指标选取交叉口处车队消散效率和交叉口处直行车道的通行能力。同时对传统模型中考虑驾驶员反应延迟的OV模型和OV模型的相关指标进行仿真,对比分析V2V条件下考虑驾驶员反应提前的跟驰模型对交叉口通行效率的影响。与考虑反应延迟的OV模型和OV模型相比,本研究提出的模型提高了交叉口的通行效率,对于解决交通拥堵、提高路口通行效率等问题具有参考价值。
但仿真验证时设置的条件均为理想条件,与实际情况有较大出入,在后续的研究工作中,将在实际交通环境中检验模型的有效性。
