白萝卜收获机械化研究现状及发展趋势
2021-07-02张富贵
张富贵,范 维
(贵州大学机械工程学院,贵阳 550025)
0 引言
萝卜是常见的蔬菜,有很高的食用价值,其直根和种子还可入药,在消食、除燥、解毒、利尿等方面都有独特的功效。萝卜中维生素C 含量较高,富含多种酶,对人体健康有重要的作用;萝卜中含有众多矿物质,不仅特别有利于儿童的生长发育,还能够降低胆固醇,控制高血压、冠心病等疾病的发作率[1]。
根据中国农业统计年鉴数据显示,2012 年萝卜播种面积为 81.2 万 hm2,2017 年达到 127.1 万 hm2,占蔬菜总播种面积的近5.6%,产量约4 500 万t,占蔬菜总产量的近5.6%,位居各种蔬菜种植面积的前3 位[2]。我国目前萝卜种植面积约133.2 万hm2,萝卜收获面积和总产量均居世界第一[3]。白萝卜最耗工费时的是收获环节,也是机械化程度最低的一个环节。白萝卜的收获包括挖掘、除土、切缨等,目前主要依靠人工来完成,有些地方利用马铃薯、中药材收获机来兼收白萝卜,但由于缺少对白萝卜物理力学特性及萝卜和土壤之间交互作用的研究,收获效果不佳,白萝卜损伤率和漏收率都很高。国外种植的萝卜以小型萝卜为主,进口收获机大都是大型的联合收获机,不适用于南方的小地块作业,且各个地区的萝卜种植模式也不同,收获机的适应性差,无法满足实际的收获需求,因此急需研制适合不同种植区的白萝卜收获机。
1 国内外白萝卜收获机械研究现状
1.1 国外白萝卜收获机研究现状
以苏联和美国为代表的胡萝卜收获机,大多以大型拖拉机为动力源,具有大型化、联合式的特点,符合欧美国家地广人稀的情况。美国福特公司于1961 年研制的新型阿尔契胡萝卜联合收获机,已经具有初步的松土、拔取、切樱、收集功能,但是容易出现漏拔和损伤胡萝卜等问题,后来欧洲一些学者和厂商在保留该机原理的基础上改进生产出罗马尼亚CLR-1、东德EM-11 等机型[4],这些机型与阿尔契收获机相比具有更加稳定可靠的性能,可解决漏拔等问题。但是这种大型收获机对于种植模式要求很高,不适合国内种植模式和萝卜品种多样化的具体情况。
阿萨力(ASA-LIFT)在根茎类蔬菜收获机方面具有多年研究经验,该公司的胡萝卜收获机主要有牵引式T系列和自走式SP 系列两种,有双行收获和多行收获两种机型(图1、图2),配备智能系统和操作面板,具有良好的操作性和可靠性,田间适用性较强。近年来随着计算机和微电子技术的广泛推广,在农业机械化上也得到了应用,美国、日本、比利时等农业发达国家已将微电子技术、自动导航技术应用到农业收获环节,实现了机械的精准控制和无人驾驶自动收获等智能化作业,减少了人工操作,节约了收获成本。但是国外种植的萝卜主要是小根茎萝卜和胡萝卜,仍然无法收获像白萝卜、青萝卜这样大根茎的农作物。

图1 单行夹拨式胡萝卜收获机

图2 自走夹拨式胡萝卜收获机

图3 久保田CH-201C 型胡萝卜联合收获机
日本在白萝卜收获机方面具有小型化、轻便化的特点,日本久保田CH-201C 型胡萝卜联合收获机(图3)能-次性完成萝卜的挖掘、夹持、输送、切秧、收集等工序,机械作业性能稳定,作业速度快[5]。小型化和轻便化的设计思路才能满足国不同种植区白萝卜收获的需求。
1.2 国内白萝卜收获机研究现状
国内的根茎类农作物收获主要是挖掘和拔取这两种方式,拔取式是白萝卜的主要收获方式[6]。虽然国内收获面积和总产量世界排名第一,但国内在联合式和自走式萝卜收获机方面仍然处于空白。国内的学者主要对萝卜品质和白萝卜干制品影响因素进行研究[7-10],对白萝卜物理力学特性和收获机的关键部件研究较少。
昆明理工大学对白萝卜的常规力学性质(弹性模量、应力)进行研了究,通过分析加载部位、方向、速度及含水率对于白萝卜的力学性质的影响,得出了含水率对于弹性模量、应力影响显著的结论[11]。青岛农业大学对白萝卜和青萝卜的几何特性进行研究,并在实验台上进行压缩试验,得出两种萝卜根部不同部位抗压力的情况[12-13],为设计根类收获机提供了支撑数据[14-17]。由于萝卜的生长坏境条件不同,萝卜根部大小差异性较大,导致了采用拔取式收获萝卜时所需要的拔取力也不同,对于萝卜的物理力学特性还需进行一定的研究。
南通农机化技术推广服务站对白萝卜收获机的松土铲进行了优化设计,如图4。对松土铲参数进行了改进,达到能够适合不同种植模式的收获要求[18]。河北农业大学设计出专用的白萝卜挖掘铲,如图5。工作时,通过挖掘铲破坏白萝卜与土壤的接触力,使白萝卜与土壤分离,再由人工捡拾装袋。该挖掘装置采用后悬挂牵引的方式挖掘白萝卜,大大提高了白萝卜的收获效率,该装置具有结构简易、成本低的特点[19]。

图4 白萝卜收获机

图5 白萝卜挖掘铲
国内对于胡萝卜收获机的研究较多,已经设计研发出了自走式联合收获机和牵引式收获机。对于松土铲和切割装置等关键部件也有了深入的研究,利用仿生学研制出高效减阻铲土来解决松土阻力大和漏拔的问题[20],针对胡萝卜联合收获过程中对顶切割装置作业后胡萝卜损伤率高、切净率低等问题,设计了一种单圆盘对顶切割装置[21],如图6。虽然白萝卜和胡萝卜的收获方式类似,但白萝卜和胡萝卜的根部几何特性相差很大,而且萝卜根部裸露在地面上的高度不一致,通过对胡萝卜收获机改进无法满足白萝卜的收获需要。
南通农机推广中心研发了一款以拖拉机为动力源的萝卜收获机,可以进行萝卜收获[22-23],但是没有对萝卜的物理力学特性进行研究,也没有收获机关键部件参数,缺乏理论支持。国内公司制造了一些多功能萝卜收获机,大多由马铃薯等根类收获机改造而来,因此无法适应复杂的田间环境,也无法满足各不同种植模式要求。
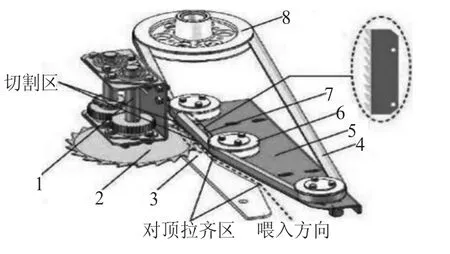
图6 单圆盘对顶切割装置
2 存在的问题
2.1 种植模式多样化
由于国内白萝卜种植地区的地形和气候各不相同,导致种植模式各不相同,萝卜种植的农艺特性直接影响其收获方式[24]。我国不同地区白萝卜种植品种、种植模式各异,由于缺乏标准化、规范化引导,农机与农艺融合程度较低,致使农机研发推广难度增加[25]。各地白萝卜种植规模不同,对于收获机的要求也不相同,在播种环节大都采用人工手播的方式,没有实现精确播种,这给机械化收获造成了很大困难。
2.2 缺少稳定可靠的机械
目前国内还没有性能稳定可靠的白萝卜收获机械,收获机依旧依靠国外进口。对引进的机械改进可以解决一些问题,但是无法在全国推广。目前白萝卜收获机仍然处于实验阶段,装备匮乏、机械化收获水平低、收获费时费工及成本高等问题已成为制约白萝卜全程机械化生产和产业发展的瓶颈[26]。
3 解决对策
(1)发展和研制适合当地农艺的机型,种植模式标准化。不同地形的农机要求不同,在北方平原地区适合发展大中型的联合收获机,而西南地区多山地丘陵,适合小型化、轻便化、分段式的收获方式。
(2)借助科研院和高校的研究力量,研制收获机的关键部件。通过试验验证,确保机械的实用性和稳定性,克服白萝卜收获机挖掘铲阻力大,切樱和运输等问题。当地公司和合作社应对农民进行农机操作和技术培训,增加白萝卜生产每个环节的规范性,提高生产效率。
(3)建立农机合作社,由散户种植白萝卜逐渐发展成大户共同生产,降低农机购买成本、增加农民收入,加快机械化进程。加快培养、扶持种植大户、农机合作社、龙头企业等新型经营主体,发挥其在规模化、标准化和品牌化生产方面的示范引领作用[27]。
(4)虽然白萝卜机械化收获处于起步阶段,但是总体上在向农机智能化、自动化和自动驾驶方向发展[28-29]。白萝卜收获机要能适应复杂多样的田间环境,其关键部件设计要合理,降低白萝卜损伤率和漏拔率。为使农民尽快掌握机具操作方法,应简化机具的操作流程,实现智能化和全自动化。
4 结论
目前国内对白萝卜收获机械的研究还处于起步阶段,白萝卜具有很大的消费市场,收获机械也具有良好的发展前景。目前对先进技术、新机型的研发力度还不够,需要政府加强重视、引导企业走向全程机械化的发展道路,企业应积极与高校合作,研制适合当地生产需要的机型。白萝卜收获机械化智能化应该借鉴国外先进理念,也需要政府的大力扶持。