应用于AGV无线充电的新型抗偏移磁耦合结构设计
2021-07-01何东林刘俊江谭天于三川邵泽宇
何东林 刘俊江 谭天 于三川 邵泽宇
摘要:当前,无线电能传输(Wireless Power Transform,WPT)的应用范围越来越广,国际上已经掀起对WPT技术研究与应用的热潮。将WPT应用于自动引导车(Automated Guided Vehicle,AGV),具有良好的发展前景。但是,WPT应用于AGV存在充电时线圈位置偏移问题,将导致互感改变,使输出电压、功率不稳。因此,设计具有强偏移容忍度的耦合机构是保持充电系统稳定运行的关键之一。针对偏移条件下互感波动问题,提出了一种新型抗偏移的磁耦合机构,相较于传统的DD-BP磁耦合机构,其Y方向偏移下互感波动减小了26%,输出电压波动减小了7.8%,输出功率波动减小了21.5%。
关键词:无线电能传输;AGV;双接收;抗偏移;耦合机构
0 引言
近年来,自动引导车(AGV)作为工业移动机器人设备的典型代表,得到了一定的发展[1],在立体仓储系统和柔性化生产线中应用十分广泛,是现代物流系统的关键装备[2],被业界大力推广。当前AGV的充电方式主要是有线插拔式充电[3],该方式不但增加人力成本,而且存在易磨损、可靠性低、安全性低等缺陷[4]。而无线电能传输(WPT)技术实现了充电系统与AGV之间的电气与机械隔离,克服了传统接触式充电方式存在的不足,从根本上消除了直插式充电方法带来的弊端,提高了充电系统的美观性、实用性、安全性[5],同时也进一步提高了充电过程的自动化程度,节约了人力成本和资金成本。因此,将WPT技术应用于AGV[6],具有良好的应用前景。
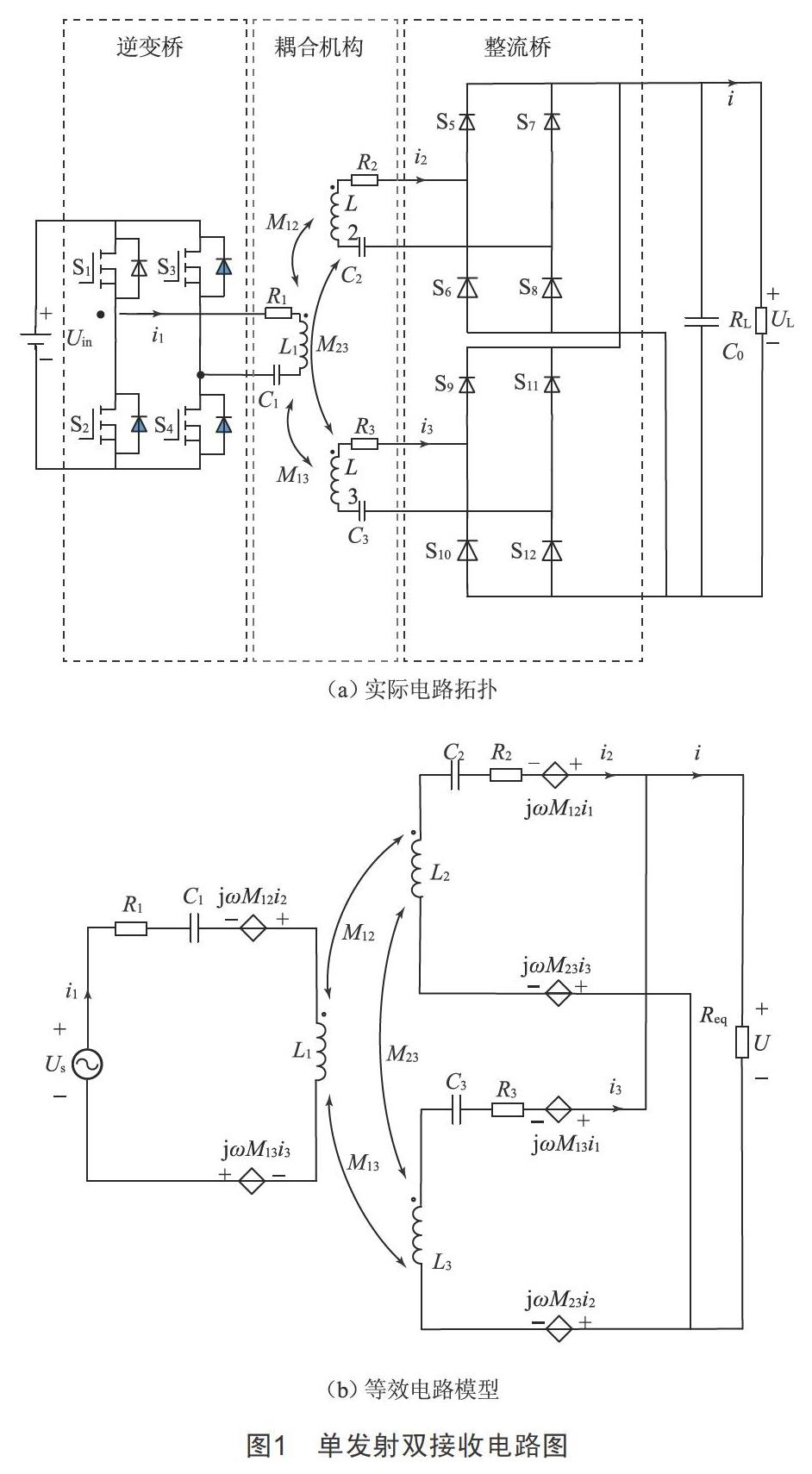
AGV机器人充电多采用低电压、大电流的充电方式,而大电流往往导致线路损耗较高,发热严重,影响系统安全。可通过增加能量通道,采用双接收WPT系统将电流分散,如图1(a)所示,以降低损耗,提高安全性;图1(b)为其等效电路模型。
然而,由于巡线和定位误差,AGV在充电区域停靠充电时,线圈会不可避免地产生位置偏移,导致耦合机构互感产生不同程度的波动,造成输出电压、功率偏离正常值。因此,具有强偏移容忍度的双接收耦合机构设计是提高无线充电系统性能的关键之一。目前提出的抗偏移耦合线圈结构有DD[7]/DDQ[8]/BP[9]等,但都存在不同程度的缺陷。
双接收无线充电系统结构等效电路如图1(b)所示,M12和M13分别为发射线圈与两个接收线圈间的互感;M23为两个接收线圈间的互感。
当线圈产生位置偏移时,可能出現以下问题:
(1)当M23≠0时,接收侧存在交叉耦合,严重影响系统性能。
(2)当M12≠M13时,且差值较大时,输出电流不均,严重时会发生整流器二极管钳位导致其中一路没有功率输出,影响系统正常工作。
(3)当M12、M13偏离正常值时,输出电压、功率发生波动。
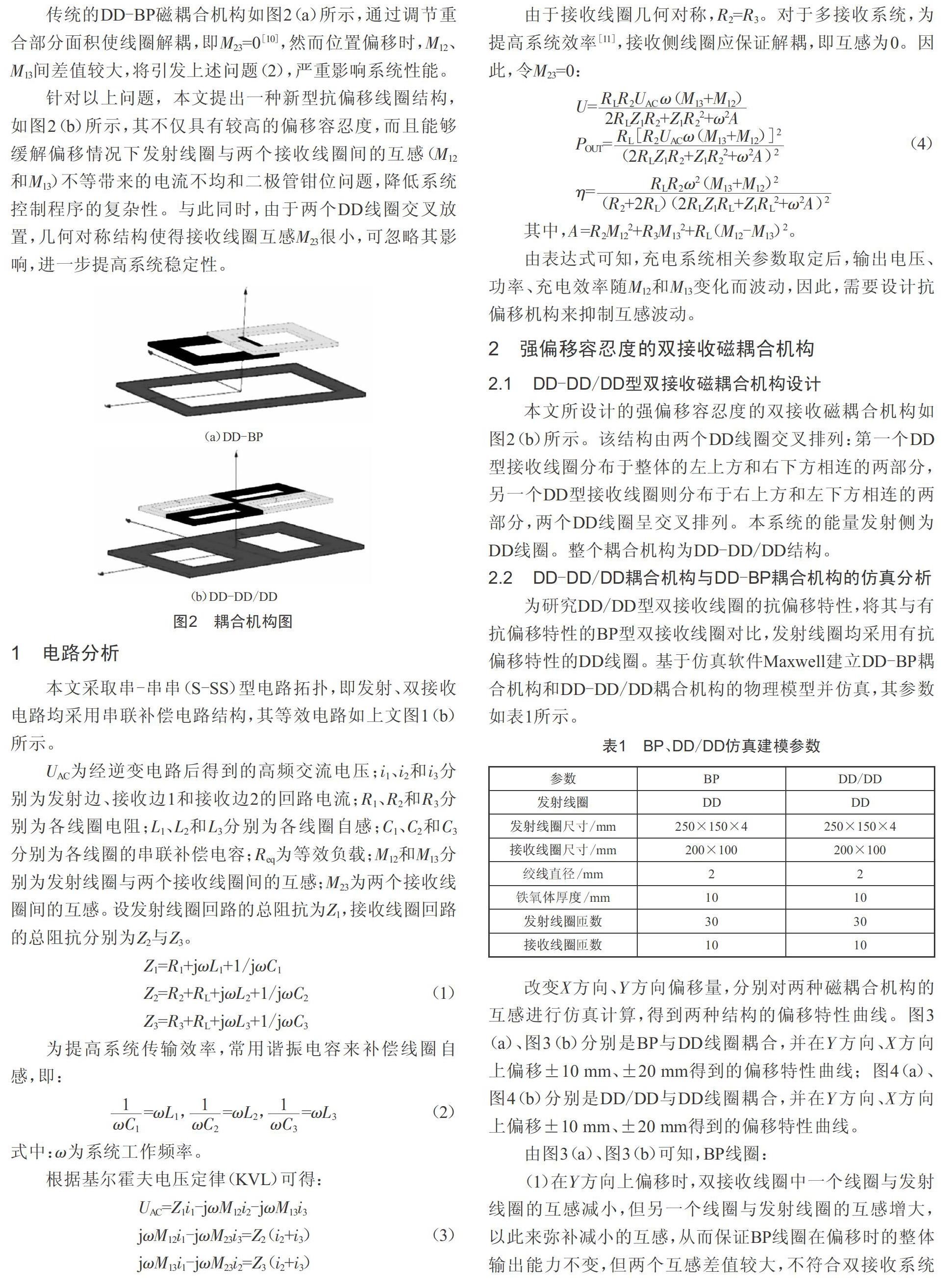
传统的DD-BP磁耦合机构如图2(a)所示,通过调节重合部分面积使线圈解耦,即M23=0[10],然而位置偏移时,M12、M13间差值较大,将引发上述问题(2),严重影响系统性能。
针对以上问题,本文提出一种新型抗偏移线圈结构,如图2(b)所示,其不仅具有较高的偏移容忍度,而且能够缓解偏移情况下发射线圈与两个接收线圈间的互感(M12和M13)不等带来的电流不均和二极管钳位问题,降低系统控制程序的复杂性。与此同时,由于两个DD线圈交叉放置,几何对称结构使得接收线圈互感M23很小,可忽略其影响,进一步提高系统稳定性。
1 电路分析
本文采取串-串串(S-SS)型电路拓扑,即发射、双接收电路均采用串联补偿电路结构,其等效电路如上文图1(b)所示。
UAC为经逆变电路后得到的高频交流电压;i1、i2和i3分别为发射边、接收边1和接收边2的回路电流;R1、R2和R3分别为各线圈电阻;L1、L2和L3分别为各线圈自感;C1、C2和C3分别为各线圈的串联补偿电容;Req为等效负载;M12和M13分别为发射线圈与两个接收线圈间的互感;M23为两个接收线圈间的互感。设发射线圈回路的总阻抗为Z1,接收线圈回路的总阻抗分别为Z2与Z3。
由表达式可知,充电系统相关参数取定后,输出电压、功率、充电效率随M12和M13变化而波动,因此,需要设计抗偏移机构来抑制互感波动。
2 强偏移容忍度的双接收磁耦合机构
2.1 DD-DD/DD型双接收磁耦合机构设计
本文所设计的强偏移容忍度的双接收磁耦合机构如图2(b)所示。该结构由两个DD线圈交叉排列:第一个DD型接收线圈分布于整体的左上方和右下方相连的两部分,另一个DD型接收线圈则分布于右上方和左下方相连的两部分,两个DD线圈呈交叉排列。本系统的能量发射侧为DD线圈。整个耦合机构为DD-DD/DD结构。
2.2 DD-DD/DD耦合机构与DD-BP耦合机构的仿真分析
为研究DD/DD型双接收线圈的抗偏移特性,将其与有抗偏移特性的BP型双接收线圈对比,发射线圈均采用有抗偏移特性的DD线圈。基于仿真软件Maxwell建立DD-BP耦合机构和DD-DD/DD耦合机构的物理模型并仿真,其参数如表1所示。
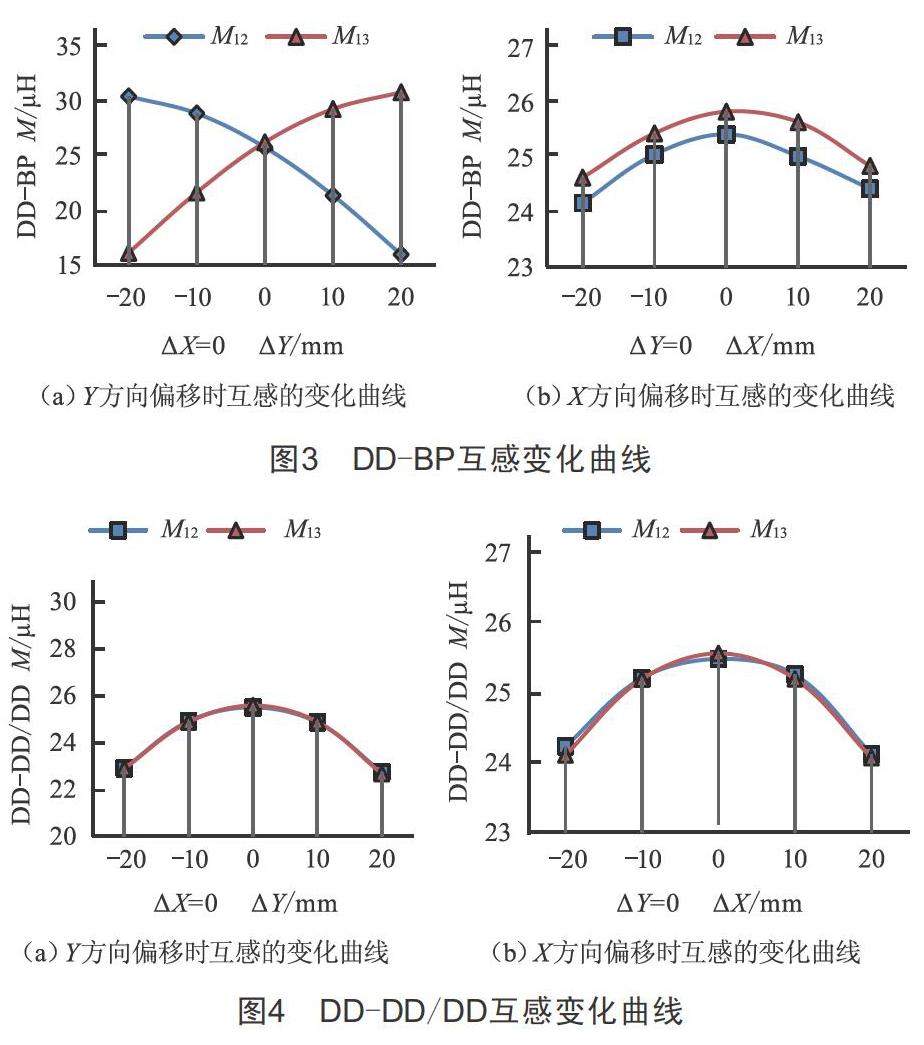
改变X方向、Y方向偏移量,分别对两种磁耦合机构的互感进行仿真计算,得到两种结构的偏移特性曲线。图3(a)、图3(b)分别是BP与DD线圈耦合,并在Y方向、X方向上偏移±10 mm、±20 mm得到的偏移特性曲线;图4(a)、图4(b)分别是DD/DD与DD线圈耦合,并在Y方向、X方向上偏移±10 mm、±20 mm得到的偏移特性曲线。
由图3(a)、图3(b)可知,BP线圈:
(1)在Y方向上偏移时,双接收线圈中一个线圈与发射线圈的互感减小,但另一个线圈与发射线圈的互感增大,以此来弥补减小的互感,从而保证BP线圈在偏移时的整体输出能力不变,但两个互感差值较大,不符合双接收系统的均流要求,互感波动为37%。
(2)在X方向上偏移时,耦合机构互感发生波动,呈下降趋势,在偏移范围内互感降低了5%。
综上所述,BP型线圈具有较好的抗偏移特性,但在Y方向上不具备良好的均流效果。
由图4(a)、图4(b)可知,DD/DD线圈:
(1)在Y方向上偏移时,两个接收线圈与发射线圈间的互感发生波动,但在偏移范围内两互感值始终保持一致,避免了电流不均的现象,互感波动仅为11%。
(2)在X方向上偏移时,两个接收线圈与发射线圈间的互感发生波动,但在偏移范围内两个互感值始终保持一致,同样避免了电流不均的现象,且互感波动仅为4.5%。
综上,DD-DD/DD型耦合机构在水平方向上具有很好的抗偏移特性,且能够在耦合机构设计上避免电流不均现象,能够大幅降低硬件电路设计的复杂性,提高系统稳定性与经济性。
3 双接收WPT系统设计
双接收无线充电系统主要由逆变电路、耦合机构、整流滤波模块组成。直流电经逆变电路变为所需的高频交流电,高频交流电通过发射线圈产生高频磁场将电能转换为磁能;高频磁场通过接收线圈发生谐振产生高频交流电,又将磁能转换为电能;高频交流电经整流滤波模块后转化成直流电后给AGV蓄电池充电。
3.1 参数设计
根据上文所述工作原理并取定AGV充电系统相关参数(f、UIN、UL、i、R1、R2、R3),计算得出理论互感M12、M13,数据如表2所示,本文搭建了一套WPT系统。
3.2 Simulink仿真
在Simulink仿真软件中搭建仿真电路,导入表2的相关参数(f、UIN、UL、i、R1、R2、R3),先代入无偏移(理想)时的互感数据仿真,再分别采用DD-BP、DD-DD/DD耦合机构在X、Y方向上产生相同偏移下的互感数据作为耦合机构互感,代入数据仿真,得到正对和最大偏移量(20 mm)下输出电压、功率、效率,如表3所示。
由表3可知,在Y方向偏移时,两种结构的输出电压、输出功率波动率如表4所示。
两种结构偏移下的充电效率相近,X方向偏移时,两种结构都具有较好的输出稳定性。而在Y方向偏移时,DD-BP的输出波动很大,且发生二极管钳位,使得其中一路无功率输出,而DD-DD/DD的输出较为稳定,且较DD-BP的电压波动减小7.8%,功率波动减小21.5%。
4 结语
本文提出了一种新型抗偏移的DD-DD/DD磁耦合结构。通过对比DD-DD/DD型双接收耦合机构与传统的DD-BP型耦合机构,DD-DD/DD型具有比DD-BP型更好的水平抗偏移能力,并且能够自然实现偏移情况下双接收系统的均流能力,极大地减轻了硬件电路设计和均流控制算法的难度,更加适用于AGV无线充电系统耦合机构的设计。
[参考文献]
[1] 杨文华.我国仓储物流机器人发展现状与未来趋势[J].物流技术与应用,2017,22(9):100-102.
[2] 唐文伟.AGV在物流领域中的应用前景分析[J].物流技术,2001(3):7-8.
[3] 冯华逸,陈科达,田勇,等.自主导航小车无线快速充电系统设计[J].广东电力,2018,31(11):129-135.
[4] 李坤.应用于AGV的无线充电技术研究[D].哈尔滨:哈尔滨工业大学,2012.
[5] 王洪博,朱轶智,杨军,等.无线供电技术的发展和应用前景[J].电信技术,2010(9):56-59.
[6] 宋凱,朱春波,李阳,等.基于磁耦合谐振的自主无线充电机器人系统设计[J].电工技术学报,2014,29(9):38-43.
[7] Auckland Uniservices Limited.Inductive Power Transfer Apparatus:WO2010090539A1[P].2010-08-12.
[8] ZAHEER A,HAO H,COVIC G A,et al.Investigation of Multiple Decoupled Coil Primary Pad Topologies in Lumped IPT Systems for Interoperable Electric Vehicle Charging[J].IEEE Transactions on Power Electronics, 2015,30(4):1937-1955.
[9] BUDHIA M,BOYS J T,COVIC G A,et al.Development of a Single-Sided Flux Magnetic Coupler for Electric Vehicle IPT Charging Systems[J].IEEE Transactions on Industrial Electronics,2013,60(1):318-328.
[10] 郑心城,陈为.电动汽车无线充电的磁耦合结构综述[J].电气技术,2017(4):9-15.
[11] 卓康.多谐振器WPT系统中交叉耦合抑制方法以及可控功率分配研究[D].南昌:南昌大学,2020.
收稿日期:2021-04-01
作者简介:何东林(1998—),男,重庆人,研究方向:电气工程及其自动化。
