四轮独立驱动电动汽车转向稳定控制
2021-07-01于树友李文博
于树友 李文博 刘 艺 陈 虹
(1.吉林大学汽车仿真与控制国家重点实验室,吉林长春 130012;2.吉林大学通信工程学院,吉林长春 130012;3.同济大学新能源汽车工程中心,上海 200092;4.北京华为数字技术有限公司,北京 100095)
1 引言
据统计,全球每年会有130万人在车辆交通事故中死亡,另外致使2000至5000万人受伤或残疾,因交通事故造成的经济损失高达5180亿美元[1-2].因此设计保证汽车行驶安全的控制策略至关重要.
近年来,四轮驱动电动汽车以响应速度快、精度高、灵活机动、节能减排的特性受到人们的广泛关注[3].由于四轮独立驱动电动车每个车轮的驱动转矩独立可控,转矩分配的自由度增加,在理论上可依据不同的工况直接控制各轮的输出转矩,既可以避免车辆因转矩过大而对地滑转,又可以根据需求提供足够的驱动力[4].因此,四轮独立驱动车辆在操纵性和稳定性方面较传统驱动方式具有显著的优势,可有效减少车辆因失稳而发生的交通事故[5].文献[6]介绍了四轮驱动电动汽车转向机构的工作原理和结构特性,设计了驾驶员辅助系统,在紧急工况时利用模糊逻辑控制方法控制每个车轮的转矩以维持车辆的稳定性.文献[7]分析了车辆参数对车辆路径跟踪的影响,并利用可测得的反馈参数对车辆的路径和加速工况输出转矩进行控制.文献[8]利用主动前轮转向和主动后轮转向的变转矩分配控制提高车辆的操纵性和稳定性.此外,采用分层控制结构处理因轮胎滑移带来的转向稳定性问题受到了广泛关注.文献[9]在上层控制器中采用非线性三步法对车辆稳定转向时需要的附加横摆力矩进行规划,在下层控制器中根据车辆垂直载荷与质心到前轴距离以及质心到后轴距离的比例关系设计力矩分配算法,提高了车辆在低附着路面的行驶安全性.文献[10]在横摆力矩控制层设计了一种基于模糊控制的横摆力矩控制器以计算车身稳定控制所需的附加力矩.在力矩分配层设计了针对两轮独立驱动和四轮独立驱动两种不同驱动模式的力矩分配算法.文献[11]在横摆力矩控制层采用滑模控制确定附加横摆力矩,在力矩分配层设计了考虑车辆滑移率和驱动力约束的力矩优化分配策略,提高了车辆的稳定性,改善了车辆动力性能.针对系统中的非线性和不确定性,文献[12]提出一种基于多模型的预测控制策略,在紧急驾驶工况下,保证了车辆的稳定性.文献[13-15]采用整车横摆稳定和电机转矩分配一体化控制,直接选用4个车轮转矩为控制变量进行四轮轮毂电机独立转矩分配,保证了滑移率在稳定区间内,提高了车辆稳定性.但是其系统模型复杂,优化策略维度偏高,不利于工程实现.轮胎力学具有明显的非线性特性,对车辆动力学具有重要影响.文献[16]认为轮胎侧偏刚度不确定性在车辆稳定性控制问题中是一种扰动,利用鲁棒H∞输出反馈跟踪期望路径.文献[17]通过递推最小二乘估计方法来确定轮胎模型参数,并估计车辆的质心侧偏角.针对线控转向控制系统,文献[18]提出一种非线性自适应滑模策略,提高操纵稳定性的同时减少来自侧偏刚度不确定引起的抖动.文献[19-20]采用轮胎经验模型“魔术公式”对轮胎侧偏特性进行拟合,具有统一性强,拟合精度高的优势.但是参数变化对拟合的误差影响很大,且不能很好地拟合极小侧偏情况下的轮胎侧偏特型.
本文设计四轮驱动电动汽车的转向稳定控制策略解决车辆转向时的安全问题,具有如下3点优势:
1) 采用双层控制结构,将横摆稳定控制和驱动转矩优化分配分开处理,这种方案解耦了横摆控制系统与驱动系统之间的动力学关系.相对于横摆稳定和转矩分配一体化控制结构,降低了整体优化策略的系统维度,降低了计算负担,提高了带约束的多目标优化控制的计算效率,更易于实现.
2) 上层横摆稳定控制采用包含图表的滑模控制方法.滑模控制能够克服系统不确定性,对干扰和未建模动态具有很强的鲁棒性.同时通过嵌入MAP数据表,降低了轮胎模型拟合难度,提高了模型精度.针对系统控制器设计过程中采用公式拟合方式建模及计算带来的控制器结构复杂问题及计算负担问题,本文使用查找MAP表方法提供了一种新的解决的方案.
3) 下层力矩分配控制采用滚动时域优化方法.滚动时域优化能够跟踪上层横摆稳定所需要的附加横摆力矩,显式处理轮胎纵向滑移率约束及电机转矩约束,优化电机转矩能耗,保证了电机能量消耗较小的同时维持车辆稳定行驶.
本文的章节安排如下:第2节建立了车辆七自由度动力学模型,第3节介绍了总体控制方案并详细给出了上层横摆稳定控制以及下层转矩优化分配控制的设计过程,第4节给出了仿真结果.
2 车辆动力学模型
为进行车辆稳定性分析,以及控制器性能的仿真验证,本文建立了包含车辆纵向、侧向、绕z轴的横摆运动以及4个车轮转动的七自由度车辆模型,如图1所示.七自由度车辆模型的动力学为[21]
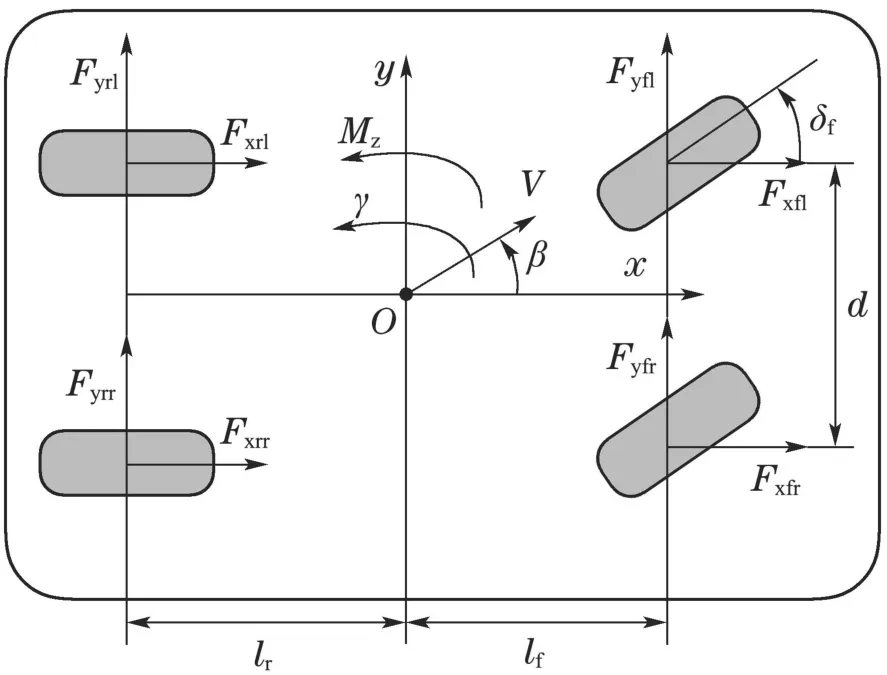
图1 七自由度模型Fig.1 Seven degree-of-freedom vehicle model
式中:m为整车质量,vx与vy分别为整车纵向速度和侧向速度,γ为车辆横摆角速度,Fx与Fy分别为车轮所受的纵向力和侧向力(下标fl,fr,rl,rr分别表示左前、右前、左后、右后车轮),Iz为车辆绕z轴的转动惯量,lf与lr分别为质心到前轴和后轴距离,Re为轮胎半径,Tei为i车轮驱动力矩,wxi为i车轮角速度,Jxi为i车轮绕驱动轴转动惯量(i为fl,fr,rl,rr).
3 四轮驱动电动汽车转向稳定控制
3.1 总体控制方案
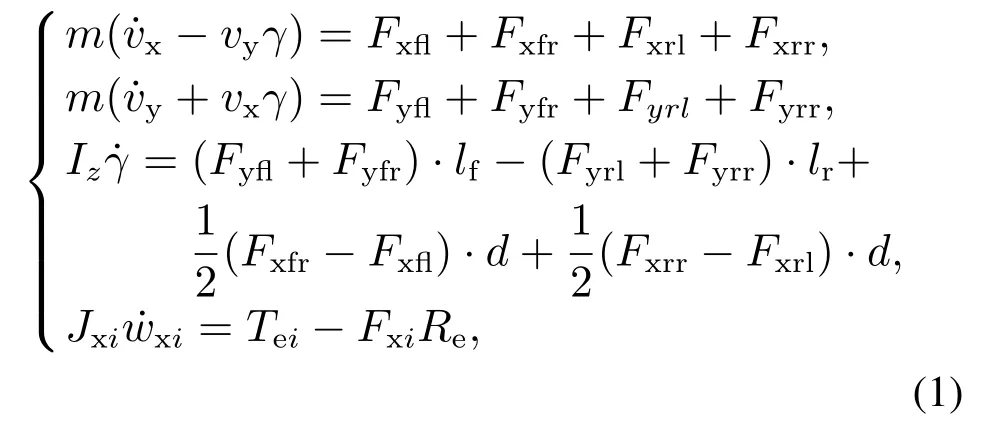
车辆在中高速行驶时,突然的换道超车以及路面的复杂附着条件都会影响车轮的侧偏特性,进而影响车辆的转向性能.图2给出了四轮驱动车辆的总体控制方案.
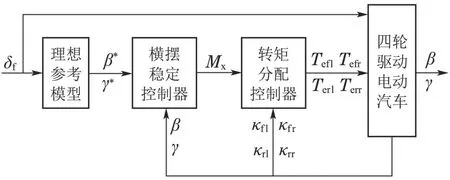
图2 四轮驱动车辆控制系统Fig.2 Four-wheel-drive vehicle control system
图2所示的总体控制方案可以分为3个子模块,即车辆行驶理想参考模块、横摆稳定控制模块、转矩分配模块.通过3个模块的协调配合,可以实现四轮驱动电动汽车的转向稳定控制.框图中:δf为前轮转角,β*和γ*分别为理想质心侧偏角和理想横摆角速度,(κfl,κfr,κrl,κrr)为4个轮胎纵向滑移率,Mx为使车辆稳定的附加横摆力矩,(Tefl,Tefr,Terl,Terr)为4个车轮驱动力矩.
注1整车横摆稳定和电机转矩分配一体化控制主要针对系统轮胎非线性和存在的约束带来的挑战.采用分层控制策略,在关注上述挑战问题的同时,将横摆稳定控制和驱动转矩优化分配分开处理,这种方案能够解耦车辆横摆控制系统与驱动系统之间的动力学关系,降低整体优化策略的系统维度以减小计算负担,提高带约束的多目标优化控制的计算效率.
注2如图2所示,四轮驱动车辆控制系统包含4个模块.车辆行驶理想参考模块的设计采用线性二自由度车辆模型.横摆稳定控制模块的设计采用忽略轮胎动力学的车身二自由度动力学模型,计算车身横摆稳定的附加横摆力矩.转矩分配模块的设计采用车轮旋转运动模型,合理分配4个车轮的驱动力矩,跟踪上层控制器规划出的期望附加横摆力.四轮驱动电动汽车模块采用七自由度车辆模型进行仿真验证.
3.2 理想参考模型
理想参考模型要求能够准确的反映车辆理想转向过程,既要保证系统具有和传统前轮转向汽车相一致的转向灵敏度,又要保证车身具有良好的姿态.即:横摆角速度稳态增益和传统前轮转向汽车相同,质心侧偏角尽量减少到零.实验表明在正常车速和较小的转向角度下,二自由度车辆模型可用于分析四轮驱动电动汽车的转向稳定性[22-23].本文利用理想参考模型,计算出给定方向盘转角对应的理想质心侧偏角β*和理想横摆角速度γ*[24].
为了建立线性二自由度车辆模型,需要忽略转向系统和悬架的影响;假设汽车只与地面平行恒速运动;假设汽车横向加速度小于0.4 g;轮胎轮廓线工作在一个线性范围内;忽略空气阻力作用.
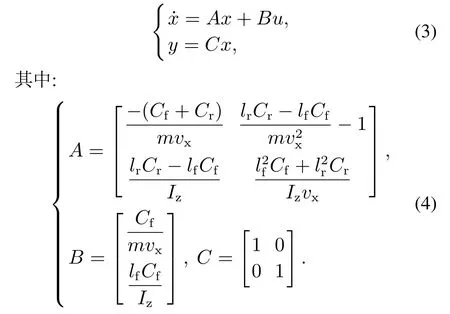
在以上假设的前提下,根据牛顿第二定律推导出二自由度车辆模型的动力学方程
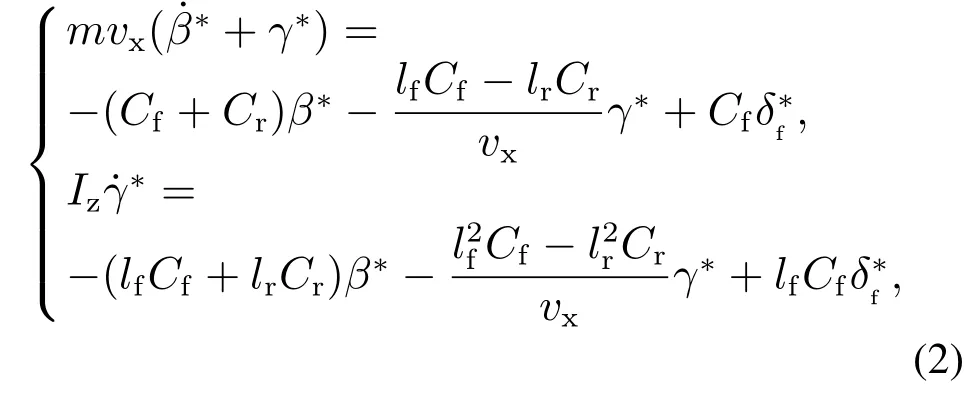
式中:Cf为前轴侧偏刚度,Cr为后轴侧偏刚度.
选取质心侧偏角以及横摆角速度作为状态变量,即x=[β* γ*].选取前轮转角作为控制输入,即u=将式(2)写成标准状态空间形式
3.3 基于MAP的滑模横摆稳定控制器
选取侧向速度、纵向速度以及横摆角速度3个自由度参与横摆稳定控制器设计.质心侧偏角可以表达为β=vy/vx.假设车辆的纵向速度不变,那么车辆的质心侧偏角加速度可以表示为基于以上假设以及式(1)可以得到车辆质心侧偏角以及横摆角速度的微分方程[25]
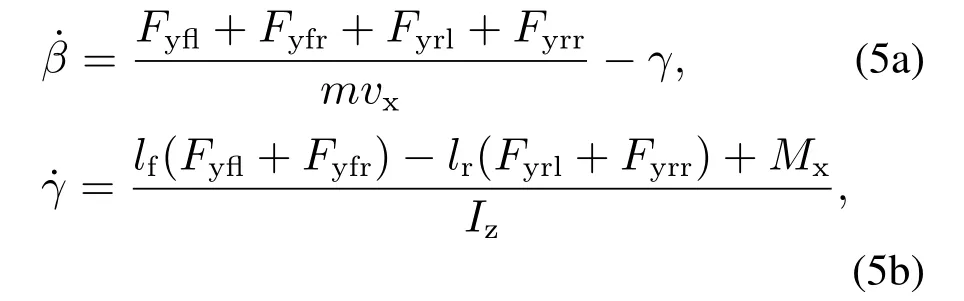
其中由4个车轮纵向力形成的附加横摆力矩

车辆在转向行驶时,质心侧偏角能够体现车辆的行驶稳定性,横摆角速度能够体现车辆的操纵稳定性[26].因此若想保证车辆转向行驶时的稳定性,可以选取质心侧偏角以及横摆角速度作为联合控制目标.采用具有快速响应、对干扰和未建模动态具有强鲁棒性的滑模变结构控制器作为上层横摆稳定控制器.
定义滑模切换函数[27]

式中:a代表控制目标中横摆角速度所占权重系数,b代表质心侧偏角所占权重系数.权重系数选取首先需考虑参数数量级差异性,其次考虑仿真验证过程中系统受模型偏差、参数摄动以及外界扰动影响而存在的跟踪误差响应情况,最后通过试凑选取权重系数.
对滑模切换函数s微分可得
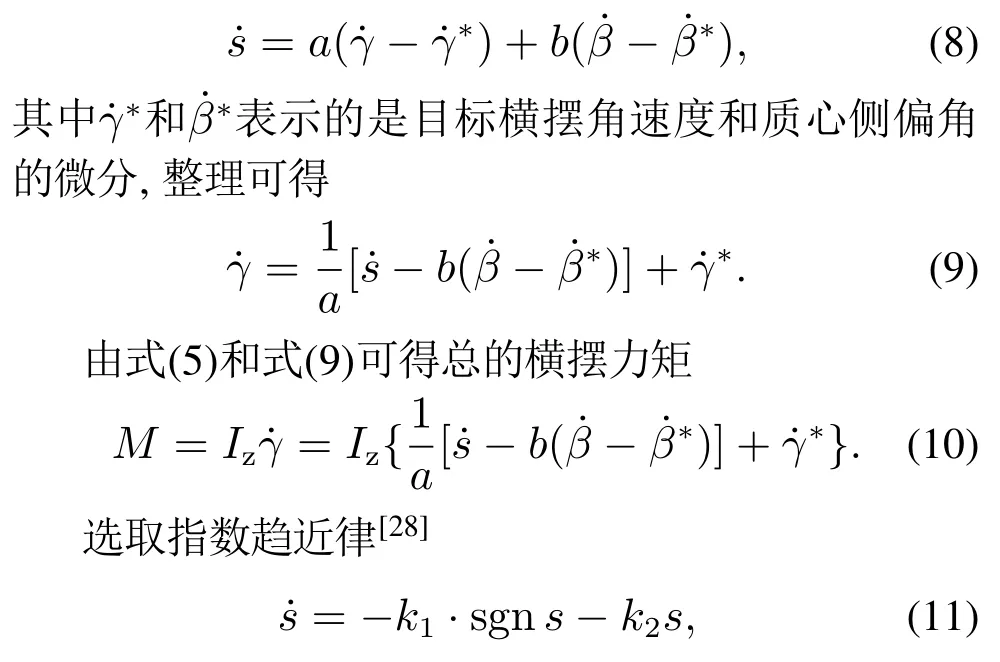
式中:sgn为符号判断函数,k1和k2为正的常数,k1的值能够体现系统状态被滑模控制迫使向滑模面s=0运动的趋近速度,k2的大小能够体现系统状态到达滑模面后向平衡点运动的收敛速度,两者的值可以通过试凑的方式选取.为了消除滑模控制中sgns不连续性导致的控制系统抖振,将其用饱和函数sat(s/c)进行替换,其中c为代表滑模面s=0周围的边界层厚度的正常数.
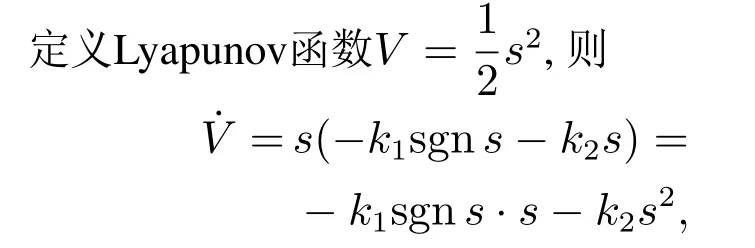
其中sgns·s非负,所设计的滑模控制器满足全局可达性条件s˙s≤0.因此横摆稳定控制系统可以按照本文设计趋近律从任意状态运动到滑动模态并收敛至平衡点.
由式(11)可得期望附加横摆力矩
通过观察式(13)可知,轮胎侧向力产生的横摆力矩My受限于侧向力的精度.由于采用传统“魔术公式”描述的轮胎侧向力与侧偏角的关系时近似的精度会受到模型参数的严重影响,本文拟采用车辆动力学仿真软件CarSim中提取出的轮胎侧向力与侧偏角数据,建立轮胎侧向力MAP表.MAP表一方面能够反映真实情况下轮胎侧向力和侧偏角的关系,充分表征轮胎的非线性特性;另一方面由于MAP表的特殊形式将复杂的式变成了“一一对应”的关系,在不失非线性的情况下简化了计算的复杂度、且占用存储空间相对较小,有利于工程实现.
当垂向载荷为4780 N时,在CarSim中提取车辆轮胎侧向力与侧偏角对应关系如图3所示.
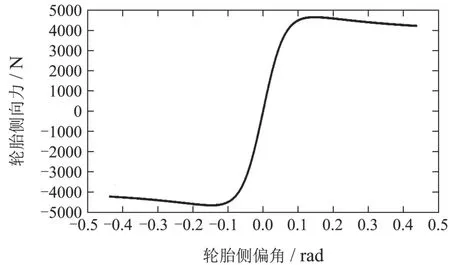
图3 轮胎侧向力侧偏角曲线Fig.3 Tyre lateral force-slip angle curve
通过提取的数据关系建立MAP数据表,采用哈希查表方法[29]得到轮胎侧向力进而通过式(13)得到横摆力矩My.
3.4 基于滚动时域的转矩优化控制器
四轮独立驱动电动汽车的控制目的是在转向时保持良好的操纵性和稳定性.上层横摆稳定控制通过对车辆参考状态(β*,γ*)的跟踪计算得到期望附加横摆转矩Mx,但它不能直接作用到车辆上.本文在下层控制策略中采用基于滚动时域的转矩优化控制器.滚动时域方法可以显式处理约束条件,并充分考虑不确定性对系统的影响,始终保持最优控制.通过合理分配4个车轮的驱动力矩,使得车辆在转向行驶时能够跟踪上层控制器规划出的期望附加横摆力矩Mx,实现车辆的稳定转向行驶.
假设车轮旋转中心的线速度与车辆质心纵向速度相等.根据轮胎纵向特性,每个车轮纵向滑移率为[30]

假设车辆的静态质量m平均分配到4个车轮上.单个车轮的旋转动力学方程为

轮胎纵向滑移率动态方程为

将式(14)及式(15)代入至式(16)可得

轮胎纵向力主要由垂向载荷和纵向滑移率决定.假设轮胎垂向载荷为定值,将轮胎纵向力简化为[31]

式中Cki为轮胎纵向刚度.相应地,轮胎纵向滑移率的动态特性可简化为
式中:Ts表示定步长采样时间间隔,k表示采样时刻.
为了保证横摆稳定的同时避免车辆因轮胎滑移带来的行驶稳定性问题,对轮胎纵向滑移率的约束为

式中κmax为轮胎纵向滑移率安全范围边界值.
记m0为控制时域,选择预测时域p=m0.在k时刻,优化问题形式如下:U(k)是控制变量序列,Y(k+1|k)是k时刻基于模型(21)预测的m0步输出.
优化问题(23)不仅要求对期望附加横摆力矩Mx的跟踪,而且在保证车辆稳定的情况下,要求尽可能减小能量消耗.
记在k时刻优化问题(23)的解为U*(k),给出四轮驱动电动汽车转向稳定控制算法如下所示:
优化算法四轮驱动电动汽车转向稳定控制.
1) 初始化:k=0,设定预测时域与控制时域.
2) whilek <Tfinal(Tfinal为系统仿真时间).
3) 测量系统状态β,γ;κfl,κfr,κrl,κrr.
4) 根据理想参考模型,由上层横摆稳定控制器计算期望附加横摆力矩Mx(k+1).
5) 下层滚动时域转矩优化控制器求解优化问题(23),获得可行解U*(k).
6) 将u(k)=[1 0···0]U*(k)作用于系统.
7)k ←k+1
8) end while
4 仿真验证
为了验证四轮驱动电动汽车转向稳定控制策略的控制效果,利用MATLAB/Simulink进行动态仿真实验,采用的车辆参数和控制器参数分别如表1和表2所示[30].
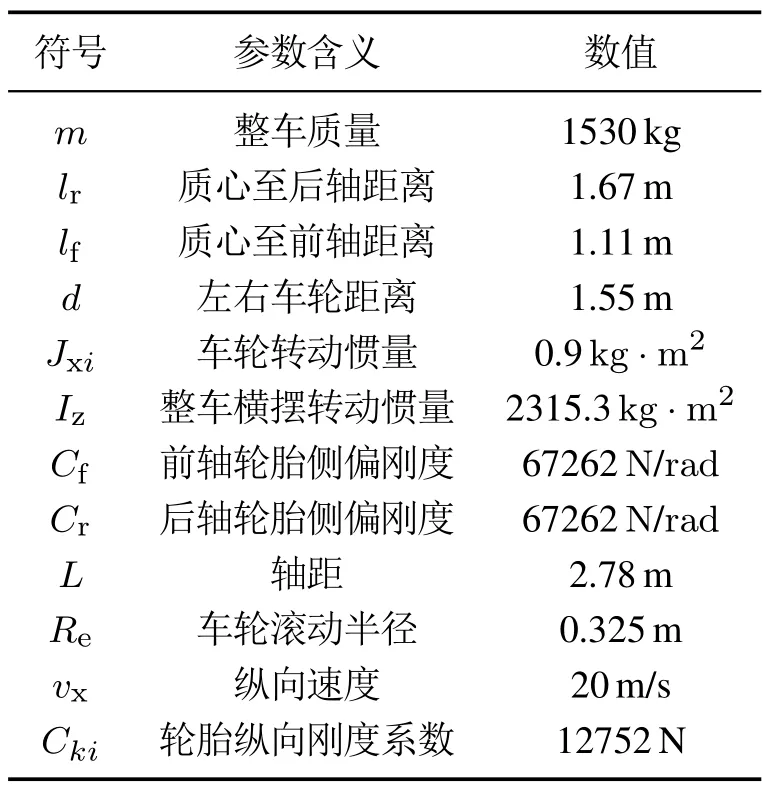
表1 车辆模型参数Table 1 The parameters of vehicle model
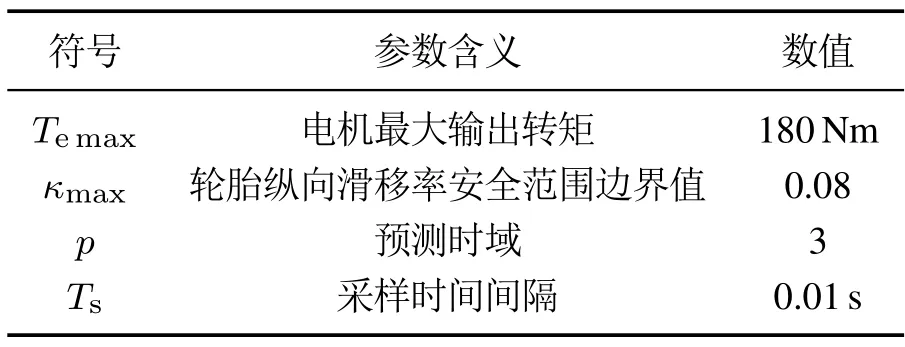
表2 控制器参数Table 2 The parameters of controller
4.1 方向盘角阶跃实验
仿真工况设置:车速为72 km/h,方向盘转角输入幅值为0.035 rad,起跃时间为1 s的角阶跃信号.假设路面平坦没有坡度,路面与地面附着系数为0.8.将MPC转矩优化分配控制效果与文献[9]中比例力矩分配控制进行对比,仿真结果如图4-8所示.
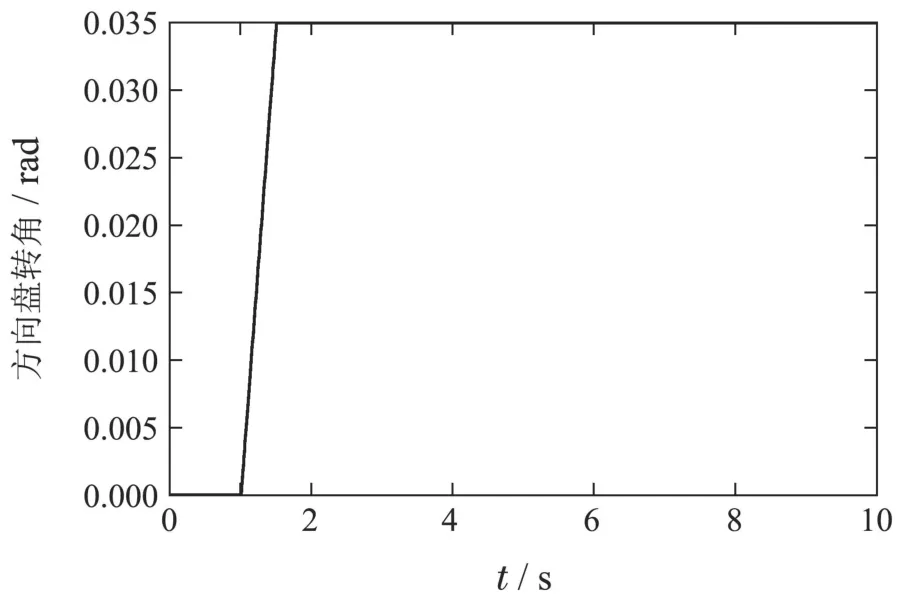
图4 方向盘转角输入Fig.4 Steering angle input
图5和图6分别为车辆横摆角速度和质心侧偏角响应仿真对比结果.其中虚线为理想横摆角速度/质心侧偏角曲线,实线为MPC转矩优化分配控制车辆横摆角速度/质心侧偏角响应,点虚线为比例力矩分配控制车辆横摆角速度/质心侧偏角响应.在控制策略作用下,电动汽车能够有效的补偿维持上层横摆稳定所需要的附加横摆力矩,即体现车辆稳定性的质心侧偏角以及体现车辆操纵稳定性的横摆角速度能够很好的跟踪理想参考值,车辆能够平稳安全转向.相比于比例控制力矩分配,MPC转矩优化分配控制下车辆跟踪效果有所提升,尤其是体现车辆稳定性的质心侧偏角,其精度较比例力矩分配控制下的质心侧偏角提升了15%左右.仿真结果表明MPC转矩优化分配控制在维持车辆转向稳定性方面更有效,性能更佳.
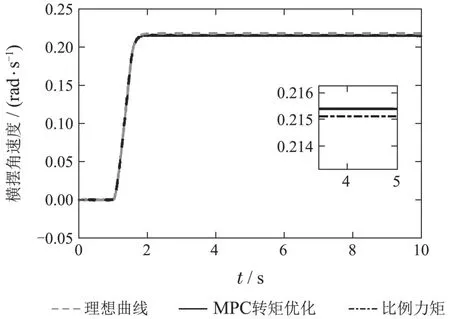
图5 横摆角速度Fig.5 Yaw rate responses

图6 质心侧偏角Fig.6 Slip angle responses
图7和图8分别为MPC转矩优化分配控制与比例力矩分配控制下的轮胎纵向滑移率与电机转矩输入对比结果.其中实线为MPC转矩优化分配控制车辆纵向滑移率/力矩响应,虚线为比例力矩分配控制车辆纵向滑移率/力矩响应.由图7和图8可知,所设计控制策略均能够将轮胎滑移率限定在0.008内.相比于比例控制力矩分配,MPC转矩优化分配控制下的车辆驱动力矩整体上有所降低.仿真结果表明MPC能够将轮胎滑移率限定在约束范围内,有效的防止车辆轮胎出现打滑的情况.同时由于在MPC转矩优化分配控制设计时,考虑了能量消耗因素,因此较比例控制分配的4个轮胎力矩总体上大幅度下降,这验证了MPC转矩优化分配控制能够在消耗较小能量的同时维持车辆的转向稳定行驶,体现了MPC转矩优化分配控制器的优越性.
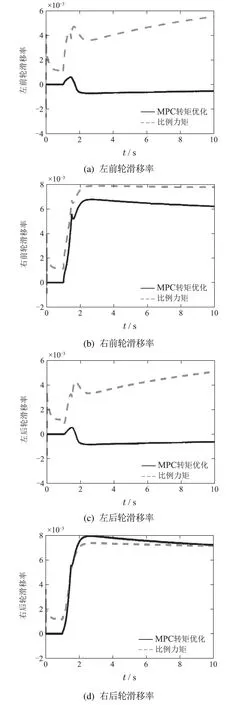
图7 轮胎纵向滑移率Fig.7 Wheel slip ratio responses
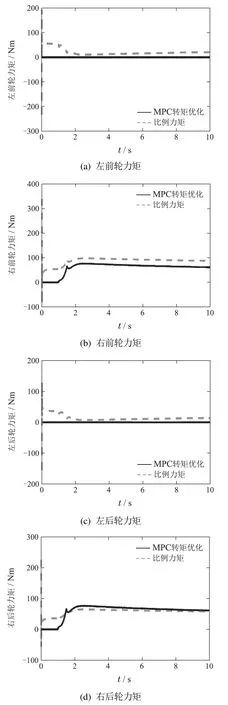
图8 驱动力矩Fig.8 Drive torque responses
4.2 方向盘连续正弦试验
方向盘连续正弦试验是让汽车连续地进行移线行驶,通过观测汽车的质心侧偏角、横摆角速度、侧向位移等数据来对汽车的操纵稳定性以及安全性进行客观评价.
4.2.1 方向盘连续正弦试验1
仿真工况设置:车速为72 km/h,方向盘转角输入角频率为1.57 rad/s,幅值为0.035 rad的正弦信号,仿真结果如图9-13所示.
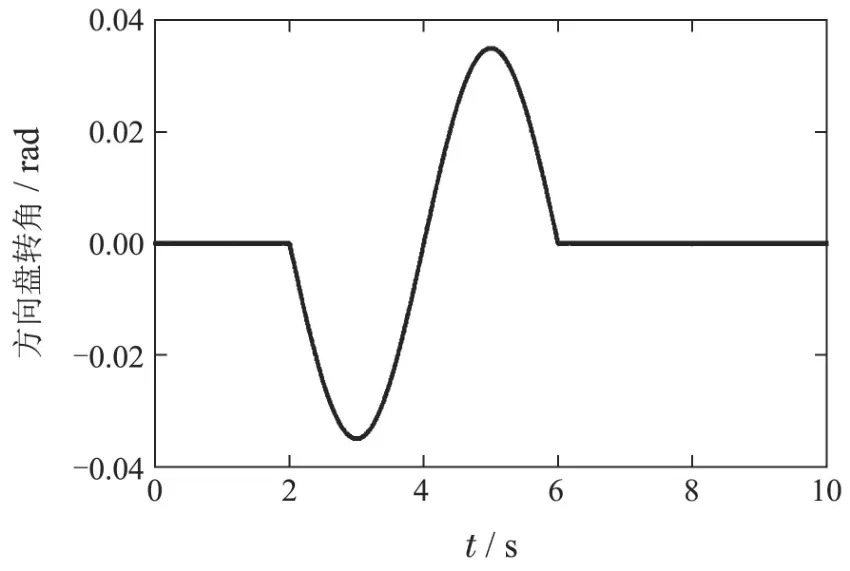
图9 方向盘转角输入Fig.9 Steering angle input
图10和图11分别为车辆横摆角速度和质心侧偏角响应仿真对比结果.其中虚线为理想横摆角速度/质心侧偏角曲线,实线为MPC转矩优化分配控制车辆横摆角速度/质心侧偏角响应,点虚线为比例力矩分配控制车辆横摆角速度/质心侧偏角响应.
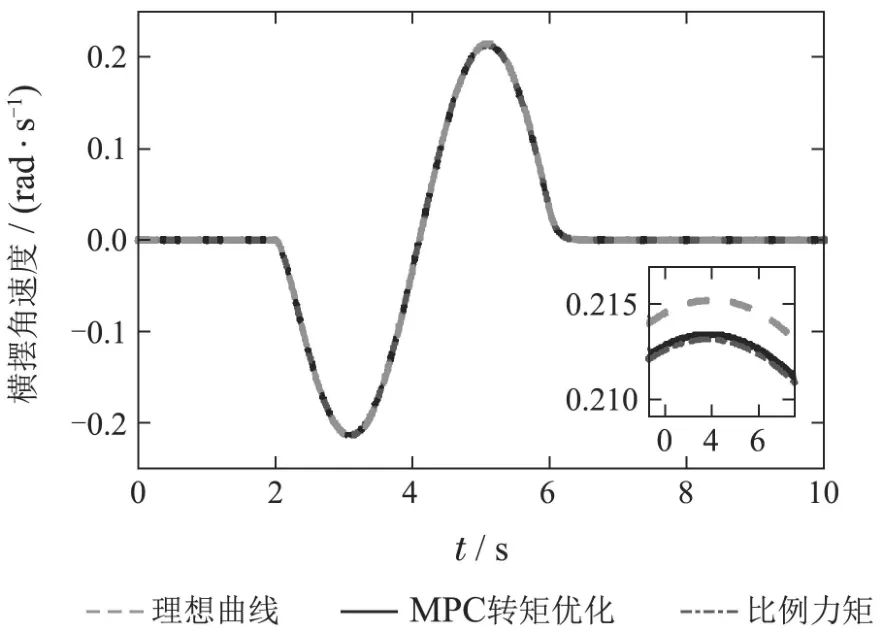
图10 横摆角速度Fig.10 Yaw rate responses
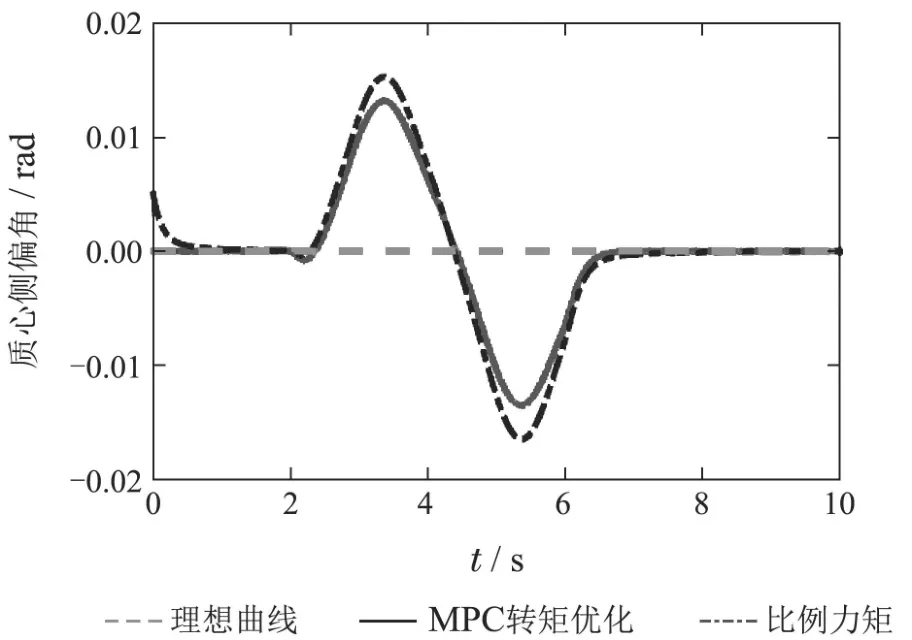
图11 质心侧偏角Fig.11 Slip angle responses
图12和图13分别为MPC转矩优化分配控制与比例力矩分配控制下的轮胎纵向滑移率与电机转矩输入对比结果.其中实线为MPC转矩优化分配控制车辆纵向滑移率/力矩响应,虚线为比例力矩分配控制车辆纵向滑移率/力矩响应.

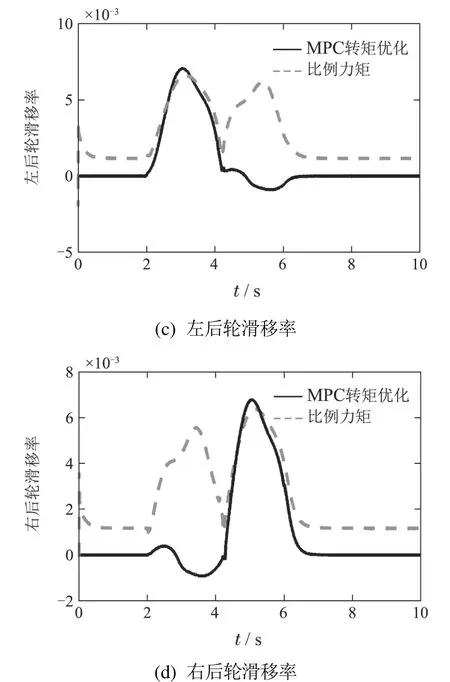
图12 轮胎纵向滑移率Fig.12 Wheel slip ratio responses

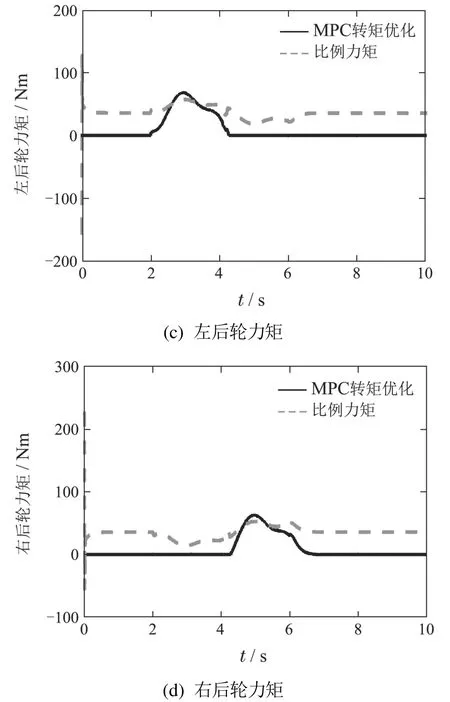
图13 驱动力矩Fig.13 Drive torque responses
仿真结果表明体现车辆稳定性的质心侧偏角以及体现车辆操纵稳定性的横摆角速度能够很好的跟踪理想参考,即MPC转矩优化分配控制与比例力矩分配控制器均能够有效的补偿维持上层横摆稳定所需要的附加横摆力矩,车辆能够平稳安全转向.由图13可知,相比于比例控制器,MPC控制力矩分配控制策略的电机转矩分配降低了能量损耗.
4.2.2 方向盘连续正弦试验2
仿真工况设置:车速为72 km/h,方向盘转角输入角频率为1.57 rad/s,幅值为0.0525 rad的正弦信号,仿真结果如图14-18所示.
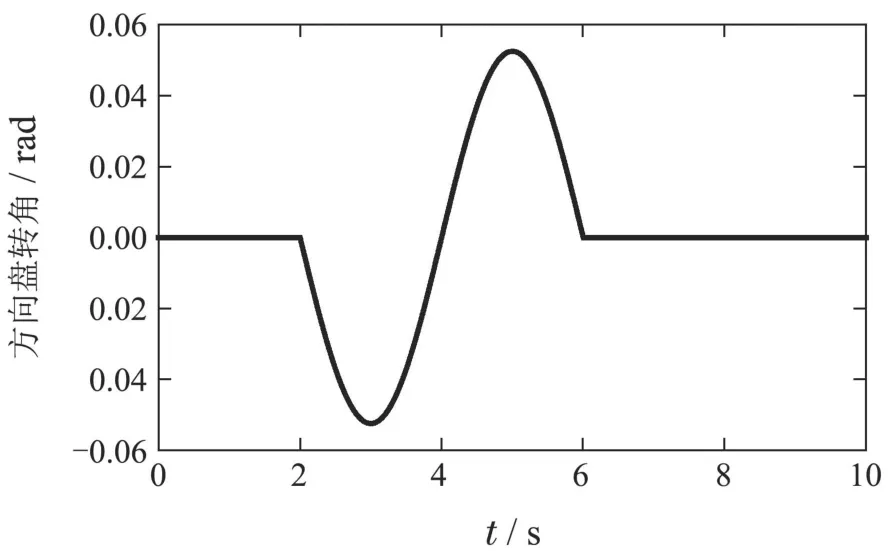
图14 方向盘转角输入Fig.14 Steering angle input
图15和图16分别为车辆横摆角速度和质心侧偏角响应仿真对比结果.其中虚线为理想横摆角速度/质心侧偏角曲线,实线为MPC转矩优化分配控制车辆横摆角速度/质心侧偏角响应,点虚线为比例力矩分配控制车辆横摆角速度/质心侧偏角响应.

图15 横摆角速度Fig.15 Yaw rate responses
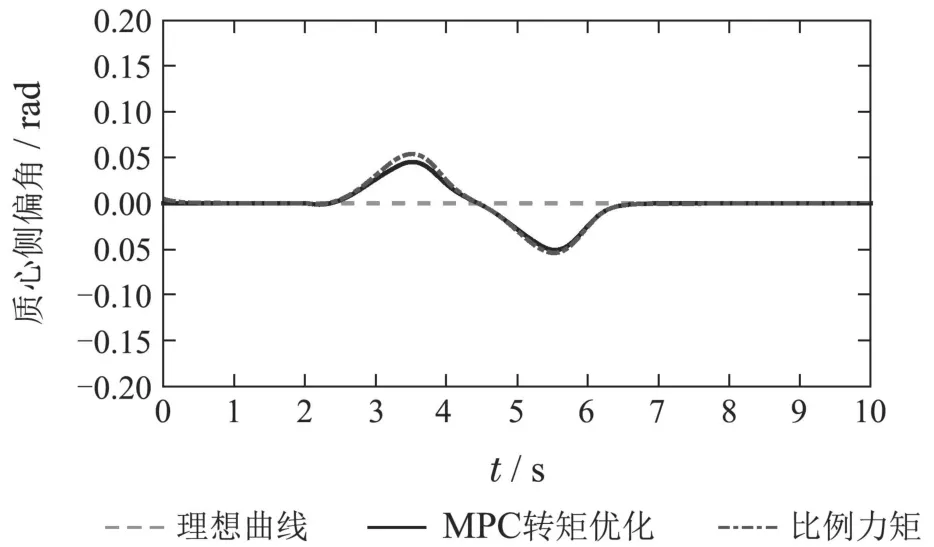
图16 质心侧偏角Fig.16 Slip angle responses
图17和图18分别为MPC转矩优化分配控制与比例力矩分配控制下的轮胎纵向滑移率与电机转矩输入对比结果.其中实线为MPC转矩优化分配控制车辆纵向滑移率/力矩响应,虚线为比例力矩分配控制车辆纵向滑移率/力矩响应.

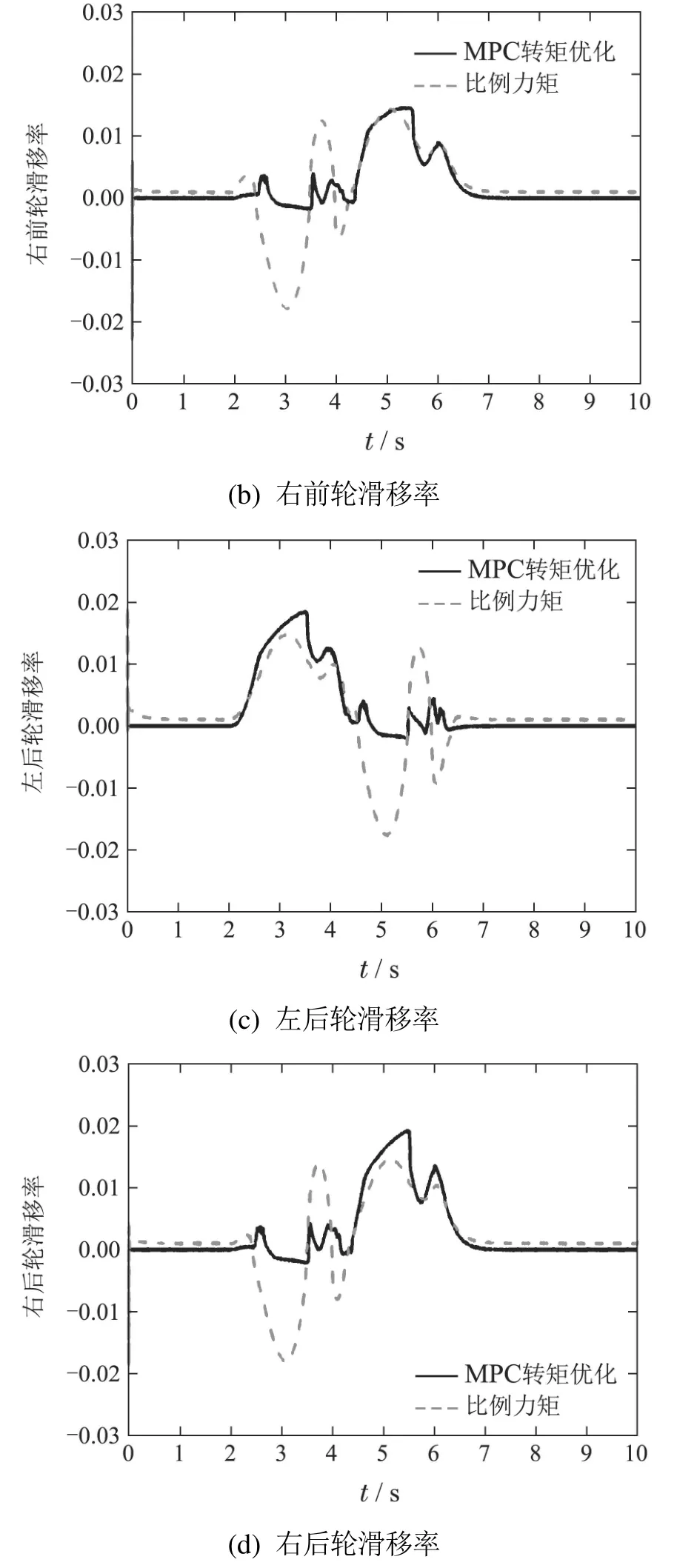
图17 轮胎纵向滑移率Fig.17 Wheel slip ratio responses
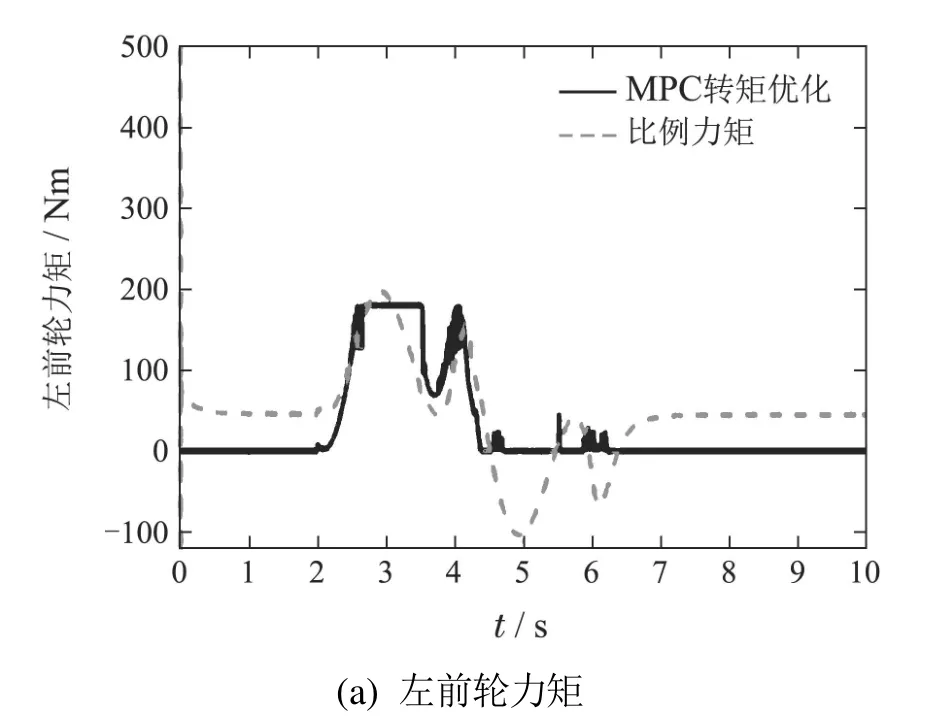
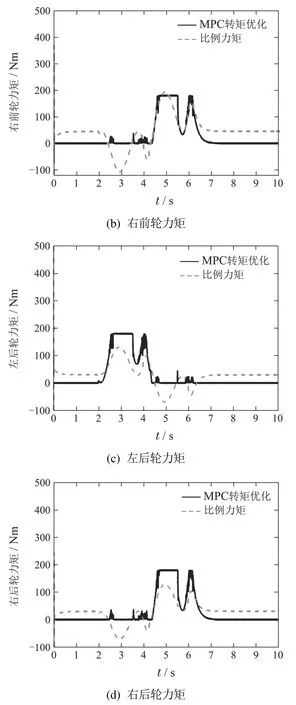
图18 驱动力矩Fig.18 Drive torque responses
仿真结果表明,当增大方向盘转角时,MPC转矩优化分配控制与比例力矩分配控制器依然能有效的补偿维持上层横摆稳定所需要的附加横摆力矩.此外由图18可知,比例力矩分配控制下的车辆前轮电机转矩超出了电机峰值转矩约束180 Nm,而MPC转矩优化分配控制策略保证了各电机转矩处于约束内,同时降低了能量损耗.
综上所述,在控制策略作用下,体现车辆稳定性的质心侧偏角以及体现车辆操纵稳定性的横摆角速度能够很好的跟踪上理想参考,车辆能够平稳安全转向.同时本文所设计的控制策略能够在消耗较小能量的同时维持车辆的转向稳定行驶.图7-8、图12-13、图17-18中,比例力矩分配控制下的轮胎纵向滑移率和轮胎力矩在初始时刻存在大的跳变,这在物理上是无法实现的,而预测控制可避免上述情况的发生.
5 总结
本文设计了四轮驱动电动汽车的转向稳定控制策略解决车辆转向时的安全问题,采用分层控制结构,将上层滑模横摆稳定控制与下层滚动时域转矩协调优化分配控制相结合,降低了整体优化策略的系统维度.将轮胎侧向力MAP表融入到控制器设计过程当中,提高了模型精度.仿真结果验证了所设计控制器的有效性,即控制系统具有维持车辆平稳转向,避免转向不足,转向过度的能力;同时能够将轮胎滑移率限定在安全范围内,防止车辆因轮胎打滑而失稳.下一步将考虑模型失配以及外部扰动对控制性能的影响.
