基于预设性能的船舶直流微电网终端滑模反推控制
2021-07-01许德智杨玮林
许德智 ,张 威 ,杨玮林 ,夏 岩
(1.江南大学物联网工程学院,江苏无锡 214122;2.四川轻化工大学自动化与信息工程学院,四川宜宾 643002)
1 引言
传统的船舶推进系统是采用原动机经过齿轮减速器驱动螺旋桨的方式.由于传动轴系、减速齿轮等机械装备的存在,不仅占用船舶大量的宝贵空间,另外也使得原动机的摆放位置也受到极大的限制[1-2].伴随着现代大功率电力电子技术的飞速发展,全电力推进系统被提出用来解决这一难题[3].
全电力推进系统由原动机、电缆、变换器与推进器等部件组成.根据配电方式的不同,电力推进系统又有着交流/直流之分.与交流配电相比,直流配电有着如下的优势[4-6]:1)发电机组之间不需要同步控制,且发电机的转速可以根据负载条件实时调整,从而提高发电系统的运行效率与带载能力.2)去除了变压器等大型设备,减少船舶的重量,提高空间利用率.3)不存在无功功率控制问题,简化了复杂的功率分析与控制问题.在这众多益处的推动力下,全电直流配电技术成为研究热点.
船舶直流配电网中通常会存在着各式各样的负载,除了用于航行的推进器,设备正常运行的服务型负载,还有电磁弹射系统、电子激光武器和雷达等在较短的时间内需要大量功率的高动态脉冲型负载[7-9].船舶的突然加减速、电磁武器的使用,所带来的负载其变化速率远远超过了发电机的爬坡功率,发电机将很难快速地输出足额的功率.必将导致直流配电网中出现发电与用电不平衡的现象,进而带来直流母线电压波动、发电机组输出的电压畸变与频率震荡,严重者威胁着整个系统的稳定运行[10].为了解决这一问题,储能装置常被引入到直流配电网中用于补偿功率差值,稳定直流母线电压,改善电能质量[11-14].
船舶直流微网中发电机与储能装置分别通过各自的变换器与直流母线相连的,为功率变换器设计高效的控制器已经成为广大学者们的研究热点之一.文献[15]基于Hamilton函数方法,对带有超导磁储能装置的船舶电力系统设计了一种鲁棒协调控制方案.文献[16]提出了一种基于直流母线电压和频率下降的反推控制器用于电压源型整流器(voltage source rectifier,VSR),解决不可预测的三相负载突变带来的发电机转矩,功率角和电压振荡.文献[17]提出了一种用于双向直流电/直流电(direct current/direct current,DC/DC)转换器(DC-DC)的新型模型预测控制器,减轻脉冲功率负载的负面影响.文献[18]设计了一种非线性的参数自适应反推控制器,控制直流微网中的功率变换器在不同的工作条件下都能将直流母线电压调节在可接受的范围内.
然而上述研究只关注了系统的稳态性能,对包括超调量、收敛速度在内的暂态性能没有纳入研究.预设性能控制是一种能够同时兼顾稳态、暂态性能的控制方法[19],它通过定义性能函数和引入误差转换函数,使得跟踪误差始终保持在由性能函数决定的边界之内,同时保证闭环系统的收敛速度、减小超调量与稳态误差.文献[20]针对一类未知非线性系统的控制问题,通过反步法设计了一种时限预设性能自适应模糊跟踪控制器,在有限时间内将跟踪误差收敛到固定区域,瞬态下的跟踪性能也得到了优化.文献[21]针对自动水下航行器面临未知洋流和推进器故障的特殊情况下,提出了一种具有规定暂态性能的自适应区域跟踪控制方案,实现洋流、模型不确定性和推进器故障的补偿,规定暂态性能的自适应区域跟踪.
众所周知,终端滑模控制(terminal sliding mode control,TSMC)是一种被广泛地应用在非线性系统中的控制方法,由于它在滑动平面中引入了非线性函数,使得滑动平面的跟踪误差能够在有限的时间内收敛到零,另外与系统的参数及扰动无关,处于滑模运动的系统具有很好的鲁棒性[22].
通过对母线电压波动原因的探究以及受上述控制思想的启发,本文首先在船舶系统中引入混合储能系统,弥补发电机出力不足,接着尝试将预设性能与终端滑模策略相结合,用于船舶直流微网系统中功率变换器的控制上,使得母线电压的跟踪误差按照既定速度进行收敛,并收敛到预定的区域之间,同时减小母线电压上升到稳态值过程中的超调量与调节时间,终端滑模控制器实现功率指令的准确跟踪,迅速地响应负载需求.
2 含有混合储能系统的船舶直流微网
为了减轻脉负载突变给船舶直流母线电压带来的消极影响,在此将超级电容与蓄电池组成混合储能系统引入微网系统中,其中发电机通过VSR与直流母线相连接,储能单元通过DC-DC变换器与母线相连.则船舶直流微网的基本结构如图1所示.

图1 船舶直流微网的基本拓扑Fig.1 Basic topology of ship DC microgrid
2.1 VSR的数学模型
VSR是将同步发电机输出的交流电变换成直流电的设备.为了简便控制器的设计,假设变换器中的开关管为理想型,无功率损耗.根据基尔霍夫电压、电流定律,得到它在三相ABC坐标系下的数学模型.
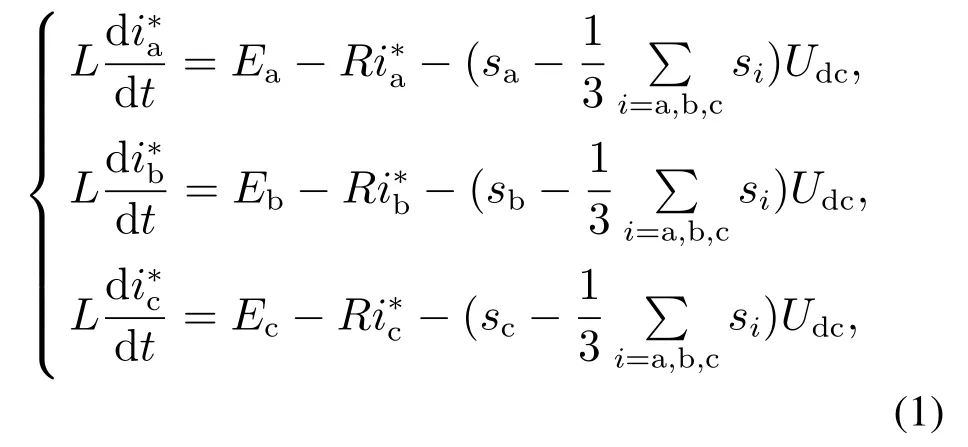
式中:Ea,Eb,Ec,分别为发电机的相电压、线电流.si取值为0或1,当sa=1时,开关管S5导通,S6关断.反之当sa=0 时,则相反.其他桥臂类似.
由于静止三相ABC坐标系下的数学模型的状态量时变的交流量,设计控制器将面临巨大困难,为此通过坐标变换将模型转换到两相旋转dq坐标系下,可以得到

式中:Ed,Eq,id,iq分别为发电机在dq坐标系下的电压、电流,md,mq为dq坐标系下的开关函数.
2.2 蓄电池的工作数学模型
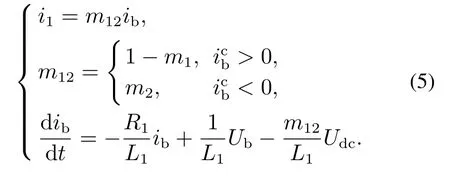
蓄电池作为直流微网中的储能单元,是一种可以循环充放电的设备.由于蓄电池的电压与直流母线电压等级不同,需要由双向DC-DC变换器完成电压转换与能量传输的任务.其工作模式有如下两种:
当蓄电池放电时,能量经过变换器传输到直流母线上,由于蓄电池端电压低于直流母线电压,故变换器工作在升压模式,此时S2关闭,S1斩波.

式中:为蓄电池的电流参考值,ib为蓄电池的工作电流,Ub为蓄电池的工作电压,m1为开关管S1的开关函数,取值0或1,i1为双向DC-DC1的输出电流.
当蓄电池充电时,变换器应工作在降压模式,此时S1关闭,S2斩波.

式中:m2为开关管S2的开关函数,取值0或1.
综上可以得到蓄电池工作的数学模型为
2.3 超级电容的工作数学模型
超级电容与蓄电池同样都为电压源型设备.与蓄电池相比,它的功率密度高,充放电速度快,非常适合为高功率脉冲型负载供电.它与直流微网的能量传输也由双向DC-DC变换器来完成,故它的工作数学模型与蓄电池相似,如下所示:

式中:Usc为超级电容的端电压,isc为超级电容的工作电流,为超级电容的参考电流,m3,m4分别为开关管S3,S4的开关函数,取值0或1,i2为双向DC-DC2的输出电流.
2.4 功率变换器的整体数学模型
根据基尔霍夫电流定律,可以求得母线电容两端的电压Udc与负载电流iL存在如下关系:

式中iL为负载电流.
由功率守恒定律可知,VSR的交流侧与直流侧存在着有功功率相等的关系:

当发电机端电压稳态时,Eq=0,将式(8)代到式(7)中可以得到

由式(2)(5)-(6)(9)可以获得功率变换器的整体数学模型:

2.5 船舶负载的数学模型
将船舶系统中的负载按照用途大致分为如下3类:推进器负载Pt、脉冲型功率负载Ph、服务型负载Ps.推进器驱动螺旋桨在水中旋转,与水相互作用产生船舶航行的动力,它所占比重最大.在静水航行中的螺旋桨功率与转速之间存在如下关系:

式中:sgn(·)为符号函数,kt为阻转矩系数,ρ为海水的密度,n为螺旋桨的转速,d为螺旋桨的直径.
脉冲型负载由电磁武器的使用所产,具有持续时间短,速率变化快等特性,服务型负载是维持船舶正常运作的基础,通常为生活用电、电子产品供电,不会出现大幅度波动.
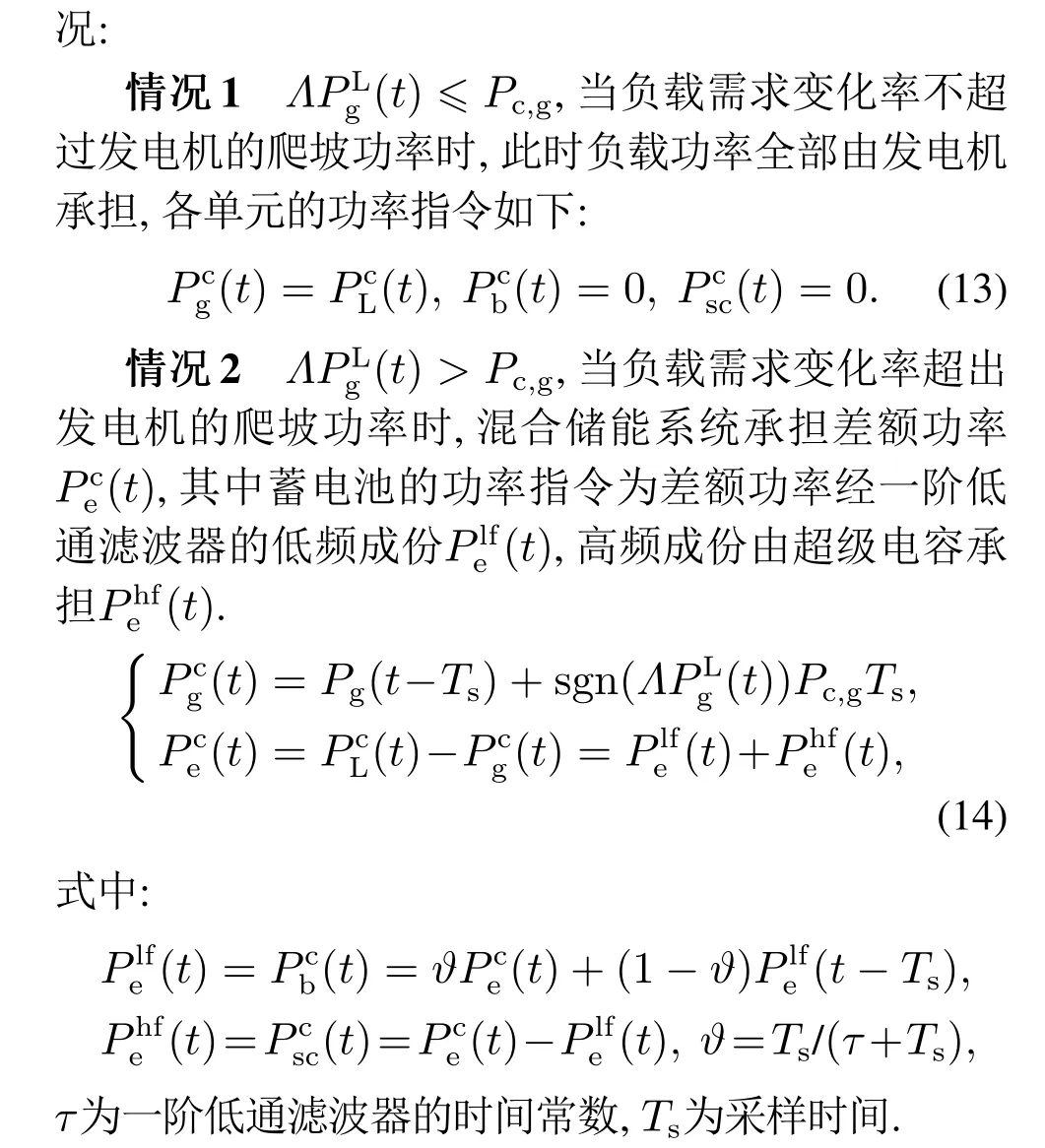
3 船舶直流微网中的功率分配策略的设计
在海面的航行中,如遇突发状况,船舶需要急停或者加、减速,此时推进器需要快速动作,将产生大幅度波动的推进负载,另外电磁武器等高能设备的使用将带来脉冲型负载.这些变化迅速的负载需要快速响应,但是发电机爬坡功率有限,调节能力不足以维持发电与用电之间的平衡,进而造成母线电压的波动.
为了解决这一矛盾,蓄电电池和超级电容组成混合储能单元被引入到船舶直流微网中用以弥补发电机的出力不足.其中蓄电池能量密度高,功率密度低,承担者差额功率中的低频成份,超级电容功率密度高、充放电速度快,承担差额功率中的高频成份.船舶直流微网系统中的具体能量管理策略如下:

船舶直流微网的数学模型以电流、电压作为状态量,因此需将蓄电池与超级电容的参考功率指令转换成参考电流指令.

4 基于预设性能的终端滑模反推控制器的设计
4.1 预设性能的基本理论
引理1连续函数φ(t):在R+→R+范围内满足如下两个限制条件,则可称φ(t)为性能函数[23]:
1)φ(t)的函数值大于零且随时间严格单调递减;
2)φ∞=
指数函数的特征与上述条件相接近,因此定义了如下的性能函数:

式中:φ0,φ∞均为大于零的常数,γ代表收敛速度,取正整数.
为了将误差λ限定在指定的范围内,定义了如下的不等式约束:

在上、下边界φ(t),-φ(t)的共同作用,误差λ(t)将跟随预设性能函数的速度进行收敛.
在设计控制器的时候,如果不对不等式约束(17)进行转换,则设计的过程将变得很复杂.因此,非常必要在设计控制器前先将其转换成等式约束.定义转换关系为

式中:ε为转换所带来的误差,ℓ(ε)为转换函数.除了要具有光滑、可逆且严格递增的特性外,还需要满足如下条件:

只要找到合适的转换函数满足上述条件,就可以将不等式(17)转换成如下的等式约束:

这里选择如下的ℓ(ε):

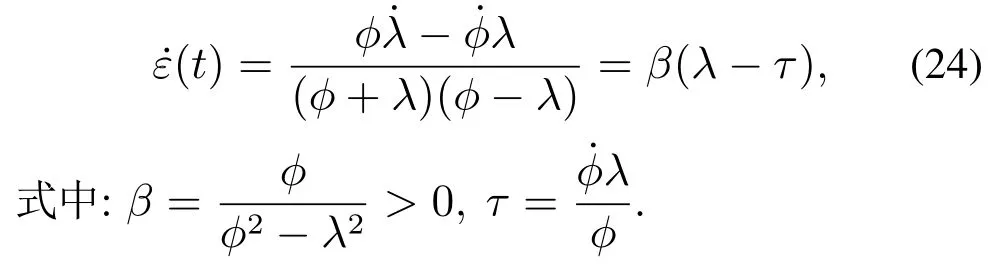
因为ℓ(ε)为可逆函数,则它的反函数--转换误差ε(t)为

对ε(t)进行求导可以得到
4.2 控制器的设计与稳定性证明
为了稳定直流母线电压、蓄电池与超级电容输出给定的参考功率,直接将数学模型中的状态变量Udc,id,iq,ib,isc作为被控对象,控制框图如图2所示.
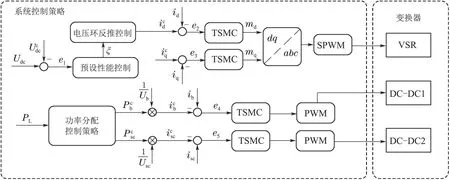
图2 控制策略框图Fig.2 Control strategy block diagram
带有预设性能的终端滑模反推控制器的设计步骤如下.
首先定义各被控量的跟踪误差:

Step 1设计VSR的d轴电流虚拟控制器,并对式(25)两边求导可以得到
为了能使直流母线电压跟踪误差e1的瞬态和稳态值都被限制在指定的范围内,且按照预定的速度进行收敛,在此引入预设性能函数φ(t),将原来的母线电压误差e1用转换误差ξ来代替,ξ的导数根据式(24)可以得到

为使直流母线电压的控制环路稳定,定义如下结构的Lyapunov函数:

对V1进行求导可以得到
式中k1>0为一个常量.
从式(50)可以得出,本文设计的基于预设性能的终端滑模反推控制器能够使得船舶直流微电网的闭环控制系统渐近稳定.
5 仿真结果分析
为了验证本文所提出的基于预设性能的终端滑模反推控制器、功率分配策略应用在船舶直流微电网上的有效性与优越性,在本节中,通过仿真试验对算法的控制效果进行验证.首先,在MATLAB/Simulink环境下搭建船舶直流微电网系统,其中能量供给单元与功率变换器的基本参数如表1所示.

表1 船舶直流微网系统的基本参数Table 1 Marine DC microgrid system parameters
其次,在推进负载部分,考虑船舶的航行途中可能出现的突然加减速的情况,在仿真中设定了如图3所示的螺旋桨速度变化曲线,在t=2 min时,螺旋桨开始启动,缓慢地加速到n=90 r/min,在t=5 min时,转速开始快速下降到零,接着螺旋桨开始进入反转,并在t=7.5 min时加速到n=100 r/min,随后螺旋桨开始减速并进入正转,在t >10 min阶段维持在n=73 r/min.由式(11)可以计算得到Pt,推进负载曲线如图4所示.
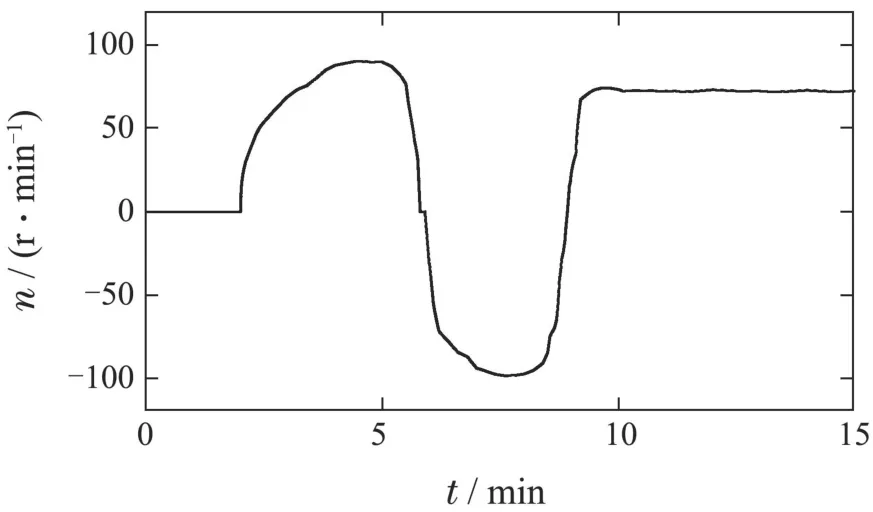
图3 螺旋桨速度设定曲线Fig.3 Propeller speed setting curve

图4 各种负载需求曲线Fig.4 Various load demand curves
服务型负载Ps在t=1 min 时接入母线,并逐渐增大到最大功率110 kW附近;脉冲型负载Ph在t=11 min时接入母线,单次最大功负荷160 kW,每次持续时间3 s 左右;两者功率曲线如图4所示.
接着,按照第3节中的功率分配策略,将直流母线上的负载分别分配到发电机、蓄电池、超级电容上,其中系统采样时间Ts=10 μs,一阶低通滤波器时间常数τ=1 μs,分配结果如图5所示.

图5 各能量单元的参考功率曲线Fig.5 Reference power curve of each energy unit
最后,将所设计的控制器代入到控制系统中,得到PWM控制功率变换器动作,控制器的基本参数如表2所示.

表2 控制器的参数Table 2 Controller parameters
设定船舶微网直流母线额定电压=800 V,围绕稳定直流母线电压和控制功率变换器输出参考功率的目标进行仿真,预设性能终端滑模反推控制器的控制效果如图6-11所示.
图6为负载需求响应曲线.结合图7-8可以看出:在t <2 min阶段,服务型负荷逐渐增大到100 kW附近;在2 min ≤t <5 min阶段,螺旋桨开始启动并逐渐加速,母线上的负载逐渐增大,但是没有超出发电机的调节能力范围,混合储能系统不需要参与调节出力;在5 min ≤t <10 min这段时间内,螺旋桨转速的突变,使得母线上负载出现了大幅度波动,由于发电机受爬坡功率的限制,出力将会不足,需要混合储能系统来弥补差额功率;在10 min ≤t <15 min阶段,电磁武器投入使用,给母线带来了脉冲型负载,此时超级电容迅速充放电,蓄电池协同配合以满足负荷需要.在整个仿真实验阶段,直流微网系统均能够对负载作出快速地响应,到达稳态时的功率波动仅在0.3 kW以内.
图7为蓄电池的输出功率跟踪情况,可以看出蓄电池全程迅速、准确地跟踪参考功率.当t <5 min时,蓄电池无需输出功率,稳态跟踪误差仅有0.2 kW,之后参与系统负荷调节,其中功率指令Pcb变化缓慢,但是需要蓄电池调节的时间较超级电容要长,实际的输出功率都在参考功率上、下0.3 kW附近.
图8为超级电容的输出功率跟踪曲线,超级电容承担着差额功率中的高频部分,指令变化较蓄电池更加突然,尤其是在电磁武器投入使用的阶段,但是超级电容同样能够完美地跟踪指令,输出足额的功率,稳态误差也保持在0.2 kW以内.

图8 超级电容输出功率跟踪曲线Fig.8 SC output power tracking curve
图10为直流母线电压跟踪情况,其中(a)反映了无混合储能(no hybrid energy storage system,nHESS)情况下的船舶直流母线电压,从中可以看出,由于发电机出力的不足,母线电压在船舶突然加减速期间上下波动了将近40 V,在电磁武器使用阶段,电压跌落到770 V左右.

图9 不同控制器下的电压跟踪误差收敛曲线Fig.9 Convergence curve of voltage tracking error under different controllers


图10 直流母线电压跟踪情况曲线Fig.10 DC bus voltage tracking curve
为了解决负载波动带来的船舶直流母线电压波动问题,在引入混合储能系统的基础上,设计先进的控制器,并将其与PI,BC两种控制器进行效果比较,从图9-10中可以看出本文控制器具有如下的优越性能:1)在预设性能函数的约束作用下,直流母线电压在从零上升到额定电压的过程中,仅产生了50 V的超调量,是其他两种方法的一半,且调节时间最短;2)在5 min ≤t <10 min阶段,推进器负载大幅度造成的母线电压跌落仅在上、下2 V左右,另外两种方法作用下的母线电压波动较大,将近5 V;3)当10 min ≤t <15 min 时,PFTSMC 作用下的电压跌落不到2 V,远小于PI 与BC,且再次恢复到额定电压用时少;4)PFTSMC作用下的电压误差全程被限制在上、下4 V之内,另外两种方法作用下的电压偏差超过了此设定值.
图11为4个滑动模态平面曲线,滑模面一直在零附近徘徊,且抖振很小,从而说明了闭环控制系统是稳定的.
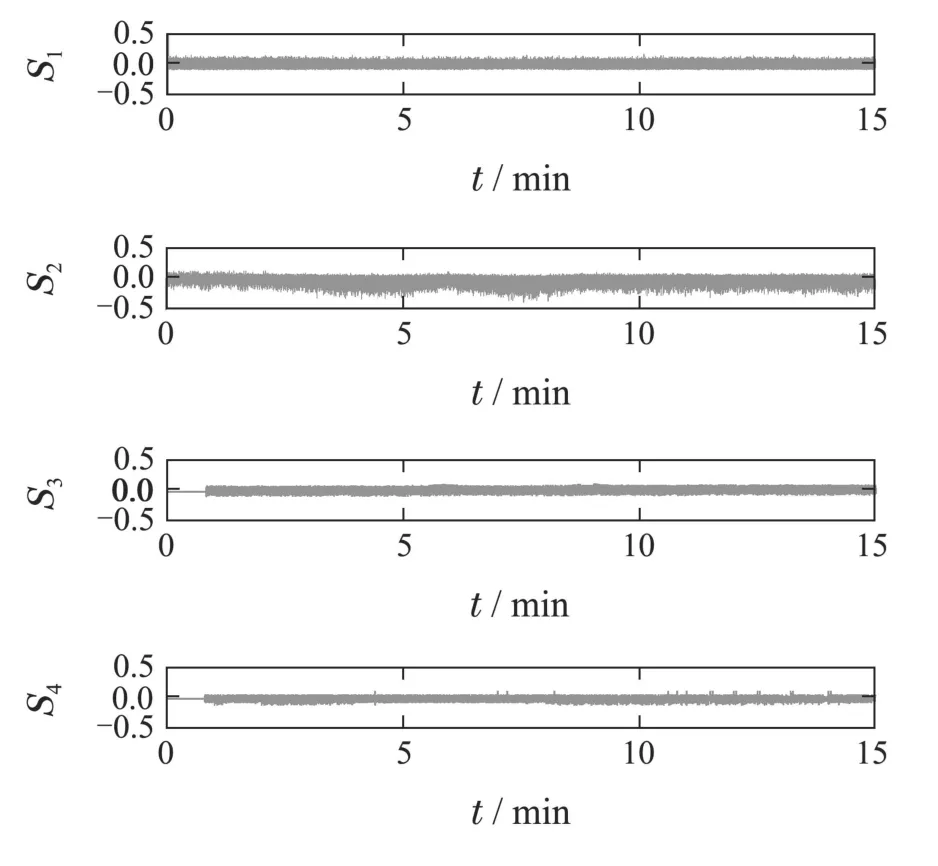
图11 滑模面S1,S2,S3,S4Fig.11 Sliding mode surface S1,S2,S3,S4
6 结论
由于负载的突变,发电机受爬坡功率的制约很难快速响应,这将很容易导致船舶的发电侧与用电侧之间产生功率失衡,进而造成直流母线电压的波动.为了解决这一问题,在船舶直流微网中引入混合储能装置用以弥补发电机出力不足的基础上,本文设计了一种基于预设性能的终端滑模反推控制策略.首先建立船舶直流微网的数学模型,接着对负载功率进行合理分配,最后将控制器作用在功率变化器上.从仿真的结果中可以看出,无论是出现突加负载、甩负荷以及电磁武器使用,直流的母线电压均能够稳定在额定值附近、且受负载波动的影响较PI、反推控制器小,且波动范围能够很好地被限制在预设的范围之内,明显比其他两种控制器优越.
后期的工作将着力研究效率更高的功率分配控制策略,并对基于预设性能的终端滑模反推控制器进行改进,以取得更优的控制效果.
