利用泄漏电缆实现的隧道内伪卫星定位方法
2021-07-01宋茂忠
崔 畅,宋茂忠
(南京航空航天大学,江苏 南京 211106)
0 引 言
全球导航卫星系统(GNSS)可在全球范围内实现全天候、高精度的实时定位。但是由于钢筋混凝土对卫星信号的遮挡,难以在隧道内为用户提供卫星导航服务。
近年来,随着隧道数量的增加,人们对隧道内定位的需求也日益增长。隧道定位可以帮助车辆确定自身位置,减少交通事故的发生。此外由于隧道的相对封闭性,一旦隧道内发生塌方等安全事故时,隧道定位可以帮助救援人员迅速确定待救援者的位置,最大限度降低事故损失。
目前关于隧道定位的研究有多种方案,主流的定位技术包括超宽带(UWB)定位[1]、WiFi网络定位[2]、射频识别(RFID)定位[3]、ZigBee定位[4]以及伪卫星定位等。伪卫星定位通过在隧道内播发与真实卫星类似的伪卫星信号实现隧道定位。该方法与其他方法相比优点明显,可以实现隧道内外定位一体化,同时信号发射功率低,抗干扰能力强。但由于伪卫星定位在隧道内会出现严重的远近效应问题,使得伪卫星定位技术在隧道中的应用场景较少。
本文提出的隧道定位方案基于伪卫星定位技术,利用2台卫星导航模拟器模拟真实卫星在隧道两端分别发射卫星导航信号。同时在隧道内铺设一条同轴泄漏电缆连接2台卫星导航模拟器的发射端,利用同轴泄漏电缆的槽孔向外界辐射信号,大大减小了远近效应问题的影响,实现了直线隧道内的一维定位。
1 定位卫星的选取
位于隧道两端的卫星导航模拟器可以通过对真实卫星信号进行模拟发射来实现隧道定位,但是此举也改变了卫星信号的传播路径,导致信号传播路径与计算伪距路径不一致。隧道定位信号传播距离的几何关系如图1所示。

图1 隧道定位信号传播距离的几何关系
卫星导航模拟器位于隧道端点处,模拟器P1发射信号的真实传播路径为r1,真实卫星S1到模拟器P1的伪距为ρ1,所以接收端实际测得的测距值为r1+ρ1,真实卫星S1到接收机的伪距为ρ',角度α为真实卫星S1与隧道的夹角。理想伪距与实际伪距之间的误差为:

式中:R1为真实卫星S1到模拟器P1的真距;R'为真实卫星S1到接收机的真距。
真实卫星到接收机S1的真距R'为:

α的取值范围为(0°,180°),根据三角形定理可知,角度α越大,R'越接近R1与r1之和,误差e就越小。角度α与卫星仰角β以及卫星的投影点与隧道之间的夹角γ(0°~ 90°)有关,如式(3)所示 :

需要尽量选取仰角β与角度γ较小的卫星,以减小理想伪距与实际伪距之间的误差。同时考虑到绝大多数的接收机将仰角大于15°的卫星视为可见星[5],所以本方案寻找的卫星的仰角应该满足这一条件。
本方案设置隧道的起点坐标(0°0′3.225 8″N,50°0′0″E),模拟搭设的隧道长度为100 m,隧道终点坐标为(0°0′0″N,50°0′0″E),选用 2019年 5月 5日 22:00接收到的符合仰角β和角度γ要求的G14、G16、G22和G27可见星。选用的4颗卫星仰角β范围为20°~30°,角度γ在30°以内。隧道端口的2台卫星导航模拟器分别通过同轴泄漏电缆向隧道内发射2路射频信号,位于隧道内的接收机接收到4路射频信号并产生定位结果。
隧道定位信号产生如图2所示,由上位机、卫星导航模拟器以及同轴泄漏电缆实现。

图2 隧道定位信号产生示意图
首先在上位机端设置用户初始参数,寻找角度合适的卫星,根据星历和历书产生导航电文,将用户初始参数和导航电文传输给卫星导航模拟器。
卫星导航模拟器位于隧道两端,负责解析卫星的导航电文,并根据中频信号的算法模型计算出卫星传播时延,得到初始码相位和载波相位等初始参数以及多普勒频偏等更新参数,生成中频信号,并通过射频调制到GPS的L1频段,通过同轴泄漏电缆发出。
同轴泄漏电缆由内导体、绝缘介质和开有槽孔的外导体组成,电磁波在泄漏电缆中纵向传输的同时通过槽孔向外界辐射电磁波。同轴泄漏电缆的传输损耗非常低,可以降低远近效应产生的影响。
2 泄漏电缆传播误差分析与修正
本方案使用了同轴泄漏电缆传播信号,大大改善了远近效应的问题。但是由于信号在同轴泄漏电缆中的传播速度远小于在空气中的传播速度,因此会引起伪距误差。假设通过接收机测得的卫星导航模拟器发射信号的传播路径为di,信号经同轴泄漏电缆从模拟器到接收机的真实传播路径为ri,则ri与di的关系为:

引起的伪距误差如下:

式中:v为射频信号在同轴泄漏电缆中的传播速度;c为光速。传播速度v的值经测为2.569 588×108m/s。将c和v代入式(5),得到:

真实传播路径ri的取值范围为(0,100 m),根据式(6)可以看出伪距误差和真实传播路径成正比关系,且在真实传播路径为100 m时,伪距误差达到最大,约16.75 m。过大的伪距误差会增大定位的位置信息偏差[6],所以需要对这部分伪距误差进行修正。
本方案采用UTREK210接收机,它会采集4路射频信号并输出中频数据,通过软件解算得到星历、历书、导航电文、NMEA消息以及原始观测量等数据。由于原始观测量中伪距信息未修正,所以需要先对伪距信息进行误差修正,再解算产生定位信息。
对于伪距的修正步骤如下:
(1)使用卫星导航模拟器发射3次射频信号;
(2)前2次发射过程中分别将接收机放置于卫星导航模拟器P1和P2附近,分别得到G14和G22卫星到接收机P1的伪距ρ1和ρ2,G16和G27卫星到接收机的伪距ρ3和ρ4;
(3)第三次发射过程中测试人员携带接收机从卫星导航模拟器P1的位置向卫星导航模拟器P2的位置缓慢行走,根据解算产生的原始观测量数据得到G14、G22、G16和G27卫星到接收机的伪距分别为ρ11、ρ22、ρ33和ρ44。伪距修正公式如下:

ρ'11、ρ'22、ρ'33和ρ'44分别为修正后的 G14、G22、G16 和G27到接收机的伪距,v为信号在同轴泄漏电缆中的传播速度,c为光速。
3 位置信息解算
在修正泄漏电缆引起的伪距误差后,需要根据修正后的伪距信息解算得到修正后的位置信息。信号传输的数学模型为:

式中:ρ为修正后的伪距;R为卫星到接收机的真距;I为电离层延迟;T为对流层延迟;δts为卫星钟差;δtu为接收机钟差。
首先进行电离层延迟修正。电离层位于地面上空距离地面50~1 000 km的区域,电磁波在穿过电离层时传播路径和传播速度均会发生变化,造成几米乃至几十米的误差。电离层延迟公式为:

式中:h表示电离层的高度;R为地球半径;E表示仰角;ζ'表示信号穿刺电离层的交点处的卫星天顶角;Iz为采用Klobuchar模型[7]对电离层进行修正得到的电离层垂直延迟。对流层是地球大气层中最靠近地面的一层。电磁波在经过对流层时会受到非色散介质的影响产生折射。由于导航电文内部无关于对流层修正的相关参数,而且难以得到实时气象参数来修正对流层模型,因此本方案采用了一种简易模型来修正对流层延迟,计算公式为:

根据星历数据得到卫星的轨道参数,求得卫星发射时刻的卫星位置。之后将卫星在轨道坐标系的坐标转化为在地心坐标系的坐标。
根据式(11)解算接收机在隧道内的位置。



卫星个数为4时,得到:

首次计算出的结果一般不准确,需要迭代直至满足规定的限差。最后把地心坐标系中的坐标转化为大地经纬度B、L和椭球高H即可得到实际位置坐标。
4 测试验证
本方案选用建筑物走廊模拟隧道环境。2台卫星导航模拟器分别位于走廊的两端,相距100 m,模拟器P1的设定坐标为(0°0′ 3.225 8″ N,50°0′ 0″ E),P2的设定坐标为(0°0′0″ N,50°0′ 0″ E),分别为隧道北端和南端位置。2 台模拟器之间连接同轴泄漏电缆。 测试人员携带UTREAK210接收机从模拟器P1的位置向模拟器P2的位置缓慢行走,接收机采集泄漏电缆辐射出的射频信号并输出中频数据,通过软件解算得到星历、历书、导航电文以及原始观测量等数据,对原始观测量中的伪距信息进行修正,产生最终定位结果。
捕获的卫星通道状态和星座图如图3所示。接收机成功捕获到4颗卫星,解扩后卫星信号载噪比均大于40 dB,符合载噪比的指标要求[8-10],并且4颗卫星的仰角和方位角均符合设计要求。
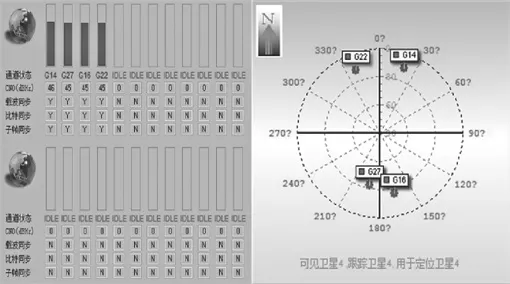
图3 捕获的信号通道状态和星座图
接收机位于隧道两端的定位坐标如图4所示,与理论坐标之间的误差在10 m以内。
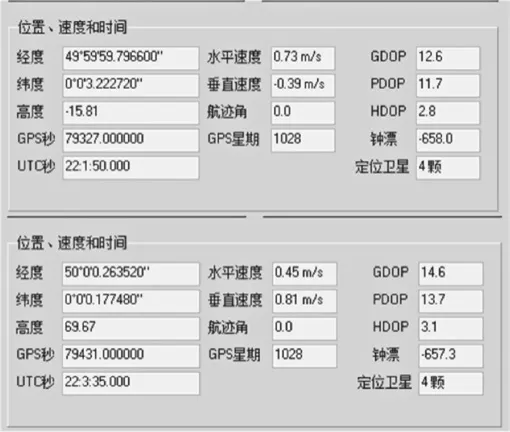
图4 隧道两端定位坐标
将修正后的位置信息导入MATLAB中,利用MATLAB得到接收机的运动轨迹如图5所示。定位轨迹为自北向南的一条轨迹,长度约为100 m,轨迹的误差在10 m以内,经计算得到均方差为4.554 m。

图5 定位轨迹
5 结 语
针对伪卫星在隧道定位中产生严重的远近效应的问题,本文提出了一种利用泄漏电缆实现的隧道内伪卫星定位方法。在上位机端设置用户的初始参数,寻找仰角与方位角合适的卫星,并产生导航电文。卫星导航模拟器解析导航电文并计算出卫星传播时延,得到初始码相位和载波相位等初始参数以及多普勒频偏等更新参数,生成中频信号并调制到射频输出。利用接收机对隧道两端的卫星导航模拟器发出的射频信号进行捕获和跟踪,对伪距信息进行修正并利用最小二乘法解算,得到误差在10 m以内的定位信息并输出定位轨迹,大幅减少了远近效应的影响。
