数字孪生驱动的悬臂式掘进机虚拟操控技术
2021-06-30张旭辉王妙云杜昱阳毛清华吕欣媛
张旭辉,张 超,王妙云,王 岩,杜昱阳,毛清华,吕欣媛
(1.西安科技大学 机械工程学院,陕西 西安 710054;2.陕西省矿山机电装备智能监测重点实验室,陕西 西安 710054)
control
0 引言
近年来,我国综采工作面智能化水平发展迅速,生产效率大幅提升。相比之下,掘进效率低下导致采掘失衡,采掘接续问题成为高采高效矿井面临的首要难题[1]。悬臂式掘进机可同时完成切割、装载、运输、行走和喷雾除尘等功能,尤其在全岩巷道和半煤岩巷道施工中不可替代。由于施工中工作面粉尘、水雾等影响,掘进机控制决策困难,容易造成超挖欠挖,巷道成形质量难以保证,迫切需要提升掘进作业的智能化水平。
国内外学者致力于煤矿巷道掘进智能化技术及装备研发,推动了掘进装备智能化发展[2]。王苏彧等[3]研发无人机值守掘进机远程监测与控制系统,操作者参考视觉监控信息,通过键盘或遥控手柄对远端掘进机进行一键式控制,监测中心实时显示掘进机的状态信息和健康状况,保障掘进机安全高效开采。由于井下低照度、高粉尘、潮湿等环境因素影响,图像信息不能完整表达井下环境和设备状况,人为干预决策的信息繁杂,目前采用的“视频监控+人工远程干预”策略难以解决掘进装备远程智能操控和设备碰撞预警问题。
近年来数字孪生(Digital Twin, DT)技术在工业领域得到广泛关注[4],数字孪生体为跨层级、跨尺度的现实世界和虚拟世界建立了沟通的桥梁,将物理对象的数字模型,通过实测、仿真和数据分析来实时感知、诊断、预测物理实体对象的状态,通过优化和指令来调控物理实体对象。中国矿业大学葛世荣[5]研究了数字孪生综采工作面技术架构,阐述了相比于现有远程中心智能性的突出特点。吴淼团队[6]针对快速掘进系统并行掘进工艺,提出基于数字孪生技术的实现框架。西安科技大学张旭辉团队[7]致力于数字孪生驱动的采掘设备智能操控技术研究,将虚拟现实(Virtual Reality, VR)技术应用于采掘装备远程智能控制,利用多种传感器和多维化信息的环境交互能力,结合计算机的逻辑思维和人的抽象思维能力,将物理世界数字信息呈现于可视化的虚拟数字世界,实现了“数据驱动,虚实同步,动态修正,碰撞检测,人机协作”的远程控制理念。文献[8-9]研究了数字孪生技术在智慧矿山应用中的现状及关键技术。数字孪生驱动和虚拟现实呈现为井下采掘工作面复杂工况下设备群控制提供了新思路。但是,如何深度融合采掘过程数据、可视化呈现复杂施工过程,自主预测碰撞并智能操控,提升掘进装备作业效率仍然面临严峻挑战。
本文结合数字孪生技术、虚拟现实技术、工业物联网等先进技术,对悬臂式掘进机的远程操控、人机协作、数据驱动等关键技术进行研究,提出一种面向悬臂式掘进机智能交互系统全局的人—信息—物理系统(Human-Cyber-Physical System, HCPS)体系结构,研发数字孪生驱动的掘进机智能交互控制系统,为远程控制提供可视化智能监测与控制支撑。
1 面向悬臂式掘进机智能交互系统的HCPS体系结构
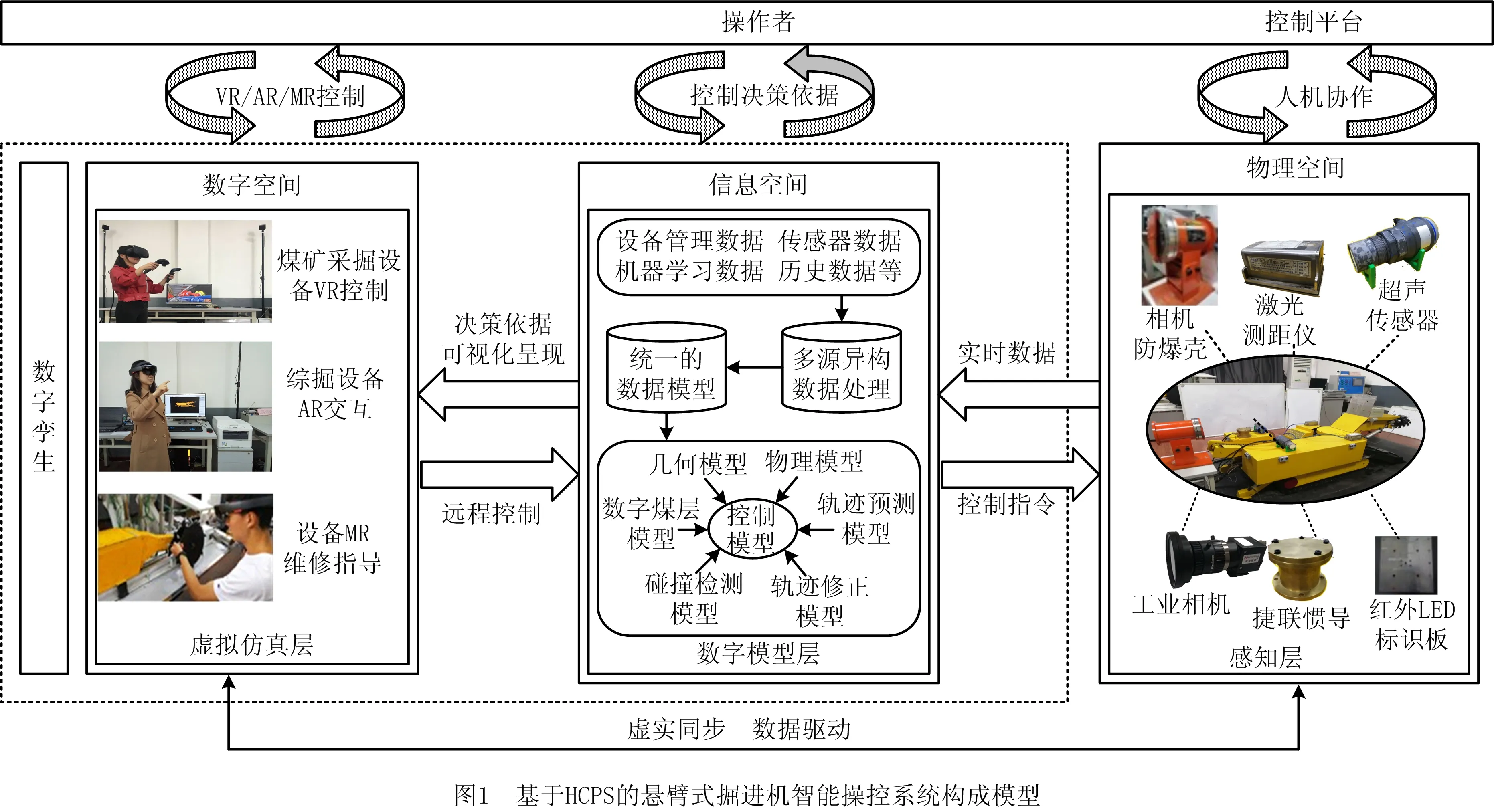
信息系统是数字孪生技术发展过程中连接人与掘进工作面的信息集成空间,帮助操作人员进行分析决策和人机协作控制[10]。通过集成人、信息系统和物理系统的多源数据,形成了基于HCPS的煤矿设备闭环智能交互模式,如图1所示。利用数据驱动的掘进机虚拟仿真与远程控制技术实现了人与设备之间的协同控制,借助虚拟现实(Virtual Reality, VR)/增强现实(Augmented Reality, AR)/混合现实(Mixed Reality, MR)技术完成人与数字空间的交互控制,以数字孪生驱动的采掘设备智能化技术实现了数字空间与物理空间的虚实融合交互,构成面向悬臂式掘进机智能交互系统全局的HCPS体系结构[11]。
基于HCPS的悬臂式掘进机智能操控系统由悬臂式掘进机物理空间数据感知融合模块、数字孪生模块和基于HCPS的人机协同控制3部分构成。其中,HCPS可以超越时间和空间的界限,实现人与物理系统和信息系统的深度融合,使井下采掘工作面与虚拟工作面处于实时交互。图1中的物理系统利用各类传感设备实现对掘进机设备状态和环境状态的感知,通过工业以太网将感知信息发送到信息系统。信息系统对感知的多源信息、异构信息分析处理形成统一的数据模型,结合矿山地理信息系统(Geographic Information System, GIS)数据形成设备群控制模型。实时数据与控制模型相结合,对控制过程中潜在行为属性进行预判。数字空间将数据、模型、预判结果等控制信息通过VR/AR/MR等技术手段进行呈现,为操作者提供可视化辅助决策依据。操作人员通过观测数字空间交互平台下达控制指令,通过虚拟通讯接口将控制决策指令反馈至信息系统与预测结果进行匹配,最终利用工业以太网将控制指令发送到物理空间的末端执行器,实现整个系统的闭环控制。
以悬臂式掘进机智能操控系统的HCPS构成模型为基础,研究井下生产过程数据对虚拟设备的数字孪生驱动技术,构建多源传感器数据实时驱动的悬臂式掘进机远程智能操控系统。首先,地测部门、生产部门以及机电信息部门提供矿山环境及设备数据建立基础数据库;其次,生产过程中根据巷道几何特征变化、设备运行情况分别建立各设备子系统数据库,实现工矿多源异构数据的实时采集、存储与共享;同时,利用数字孪生技术将煤矿掘进工作面的设备状态及环境信息变化实时映射于可视化的三维虚拟空间,通过访问远端数据库,分析数据之间的逻辑关系,构建统一的数字模型和数字孪生体,为可视化决策提供孪生模型、孪生控制以及孪生服务;进入自动生产过程后,虚拟模型实时修正相互位置,并对异常情况如人机、设备间的碰撞进行自主预警;对于复杂突发情况,由监控室人员按下急停按钮进行人为干预;最后,在构建掘进工作面虚拟仿真场景的基础上,增加设备状态预警分析和历史数据回溯模块,为远程操控提供可靠的决策依据,保证人员和设备安全,实现煤矿少人甚至无人自动化开采。
2 悬臂式掘进机物理空间数据感知与互联
2.1 基于多传感器的掘进机位姿监测
悬臂式掘进机空间位姿监测是实现掘进机远程操控和断面自动成形控制的基础,包括截割头和机身位姿测量两部分功能。如图2所示,掘进机位姿监测平台由传感检测模块、机载控制器和掘进机上位监测软件平台构成,其中机载计算机借助传感检测模块实现对掘进机机身和截割头的位姿检测,检测数据通过通信模块发送至计算机。机载计算机将检测数据通过工业以太网上传至掘进机监测平台,同时将控制指令下发至可编程逻辑控制器(Programmable Logic Controller, PLC)控制器,通过液压系统驱动悬臂式掘进机完成相应的掘进功能。

传统截割头位姿检测通常采用伸缩油缸行程传感器安装于液压缸内部,监测截割臂的升降角度和水平回转角度。由于掘进机在工作时振动噪声,油缸行程传感的稳定性差,精度不足。课题组提出一种基于激光点—线特征的机器视觉非接触式位姿测量方法[12],利用防爆工业相机采集红外LED标靶图像(安装于截割头)计算出截割臂的左右摆角与上下抬升角,另一个安装于机身的防爆工业相机采集两束激光指向仪图像,按照建立的两点三线模型计算出机身位姿。结合截割臂关节参数等实现截割头相对于机身的位姿参数,并借助微波雷达获得掘进机前向煤壁距离,再融合捷联惯导测量数据,实现悬臂式掘进机截割头位姿参数和机身位姿参数的智能感知。其他设备运行工况数据和环境参数,包括管路压力、温度、粉尘监测、瓦斯浓度监测、一氧化碳浓度监测等数据均作为监测信息上传至监测平台。
2.2 多源信息互联模型
构建多源信息互联模型,将复杂的抽象数据通过映射关系转化为图像形式,以此增强操作人员对掘进环境的认知。结合数据挖掘技术、可视化技术和人机交互技术加强对多源异构数据的理解、推理和决策。
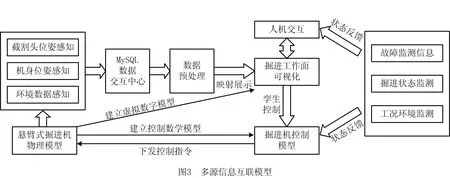
如图3所示,通过固定在悬臂式掘进机各关键部位的传感器和装置完成掘进机截割头位姿感知、机身位姿感知和环境数据的感知,将采集到的信息数据通过以太网传输至MySQL数据库交互中心,进行数据预处理后借助虚拟模型映射至虚拟空间,以可视化的方式实现人机交互,直观地展示故障信息、掘进状态、环境状态等。对孪生数据进行挖掘,建立掘进机碰撞检测模型,结合悬臂式掘进机运动学模型,为实现掘进机智能控制建立数据支撑。多源信息互联模型通过对数据的深入分析,获得掘进机故障监测信息以及截割断面质量状况。反馈循环存储了互联模型中被深入分析的数据,协助操控者对设备故障进行预处理。
2.3 高效实时的数据交互
掘进机远程控制过程中数据库管理的主要任务是确保全系统各种各样的数据互联、交换与共享,保证数据的正确性、一致性与完整性。通过传感器数据的集中管理,可以获取传感器的当前状态,追溯历史数据实现感知对象的行为预测,通过对集中存放的数据群进行分析,有望实现不确定性事件的预测感知。
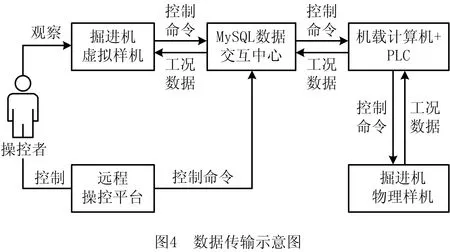
掘进机虚拟操控平台与可视化虚拟仿真平台之间的通讯利用机载防爆计算机采集控制平台的操控指令,通过RS485通讯方式将控制命令发送至MySQL数据库,虚拟仿真平台通过访问数据库操作指令驱动虚拟样机运动。虚拟现实交互平台与物理掘进机之间的通讯也是将MySQL数据库作为数据交互媒介实现数据传输。PLC控制器采集多源传感器信息,并将收集的多源数据通过RS485总线传输至MySQL数据库,虚拟交互平台通过调用数据库信息,实时修正虚拟掘进机运动状态。数据传输示意图如图4所示。
数据传输过程中,如何协调物理空间与虚拟环境之间的信息是需要考虑的首要问题,掘进机远程虚拟操控系统建立过程中,基于统一坐标系的数据协调方法将物理空间信息实时映射到远程控制的可视化虚拟交互界面。
数据传输的实时性是保证远程控制有效性和安全性的前提。本系统运行中需要物理掘进机的位姿、工况等方面数据,传输到远程监控平台的位姿数据用于虚拟掘进机位姿的实时更新,因此,数据传输量小,虚实环境之间的操作同步延迟影响较小。笔者团队前期对网络控制系统实时性进行研究[13],通过采用高效的微处理器、实时操作系统以及高效的协议编/解码算法,可减小协议打包、解包延迟时间。对于煤矿装备可以采用煤矿井下光纤环网加上合理的采集和传输参数设置来解决通信延迟问题。另外,随着5G技术、WIFI6技术的不断进步与更新,低延迟高带宽的通信将不再成为数字孪生驱动的障碍。
3 数字孪生模型的构建
3.1 数字煤层模型
将地质钻孔勘探数据采用插值方法形成顶底板变化曲面,结合工作面煤岩界面开切眼数据、工作面运输巷与回风巷地质测量数据,构建数字煤层三维模型,如图5所示。将数字煤层模型导入Unity3D开发平台,经过渲染得到虚拟巷道模型,为建立虚拟交互平台提供可视化环境模型。

3.2 设备虚拟仿真模型
在三维造型软件中完成的掘进机几何建模导入Unity3D开发平台,将视体中的场景数据映射到屏幕坐标系完成模型渲染。对掘进机几何模型添加重力、关节组件铰接组件等物理特性建立设备物理模型。通过对掘进机虚拟样机联动方法的研究,实现设备虚拟仿真模型的动态编程[14-15]。
为了将虚拟仿真模型与虚拟空间耦合在一起,如图6所示,在虚拟空间中建立虚拟世界坐标系W系(OwXwYwZw),对象坐标系O系(OoXoYoZo)描述虚拟样机坐标,各个视角摄像机可以用观察坐标系V系(OvXvYvZv)描述。Unity3D虚拟现实开发平台中使用左手坐标系,选取X轴代表水平方向,Y轴代表垂直方向,Z轴代表深度。

实现虚实掘进机同步控制时,虚拟掘进机坐标需进行适当的变换,转化为虚拟空间世界坐标系下,才能进行掘进机运动状态的虚实匹配。假设世界坐标系中有一点ρ=[x,y,z],对象坐标系中有一点ρ′=[x′,y′,z′],ρ向ρ′变换通过齐次变换矩阵表示为

(1)
式中:R表示旋转矩阵,T表示平移、缩放等复合矩阵。引入四元数来表示旋转矩阵R。
假设空间任意一点可以表示为q=[s,u],s是刻度因子,u为矢量坐标,即:
(2)
式中:
(3)
任意一个位置矢量绕q的旋转表达式为:
u′=quq-1。
(4)
式中q=[cosθ/2,usinθ/2],表示绕单位矢量u旋转角度θ。如果θ是固定角,依次围绕轴方向旋转得到q=qyawqpicthqroll;如果θ是欧拉角,则q=qrollqpicthqyaw。将q表示成四元数形式:q=[s+xi+yj+zk],将其化为齐次矩阵:
(5)
式中:
M11=1-2(y2+z2);M12=2(xy-sz);
M13=2(xz+sy);M21=2(xy+sz);
M22=1-2(x2+z2);M23=2(yz-sx);
M31=2(xz-sy);M32=2(yz+sx);
M33=1-2(x2+y2)。
(6)
变换后的虚拟掘进机数据融合于虚拟空间中,形成虚拟掘进面环境场景。
3.3 轨迹规划模型
截割轨迹规划模型建立截割头在巷道断面的运动路径。巷道截割断面有梯形、矩形、拱形等几种,本节以矩形巷道断面为例,采用先水平后垂直的循环截割方式,从断面的最下方开始截割,按照规划路线顺次向上运动,最后进行刷帮完成一次断面截割,建立截割头的运动轨迹模型。
(7)
采用三次多项式轨迹规划法对截割头轨迹进行规划,通过构建截割轨迹光滑函数,计算得到截割头在任意时刻的位置。假设起点位置截割头的关节角度为θ0,终点位置截割头关节角为θf,截割所需时间为tf,则
θ(0)=θ0,
θ(tf)=θf。
(8)
截割头在起点和终点的速度为0,则

(9)
因此,截割头在任意时刻的轨迹位置函数为:
θ(t)=k0+k1t+k2t2+k3t3。
(10)
将式(8)和式(9)代入式(10)中,可得:
k0=θ0,
k1=0,
(11)
构建出截割轨迹光滑函数,通过确定截割头运动的起点终点和所需时间,可以得到巷道断面截割任意时刻截割头的位置、角速度和角加速度的时间函数:
位置函数:
(12)
角速度函数:
(13)
角加速度函数:
(14)
3.4 动态修正模型
在设备虚拟仿真模型和轨迹预测模型基础上,通过实时访问煤岩识别数据与预测截割曲线之间的空间投射关系,得到影响设备运行的关键参数修正量。单一设备修正量融合设备群耦合关系,构建设备动态修正模型,从而实现设备位姿动态修正的目的。
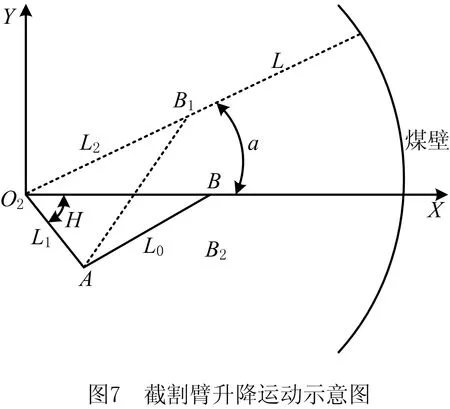
悬臂式掘进机操控过程中重点关注截割头的运动轨迹,参考截割臂升降运动示意图(如图7),根据余弦定理截割臂升降角度α的数学模型为:
(15)
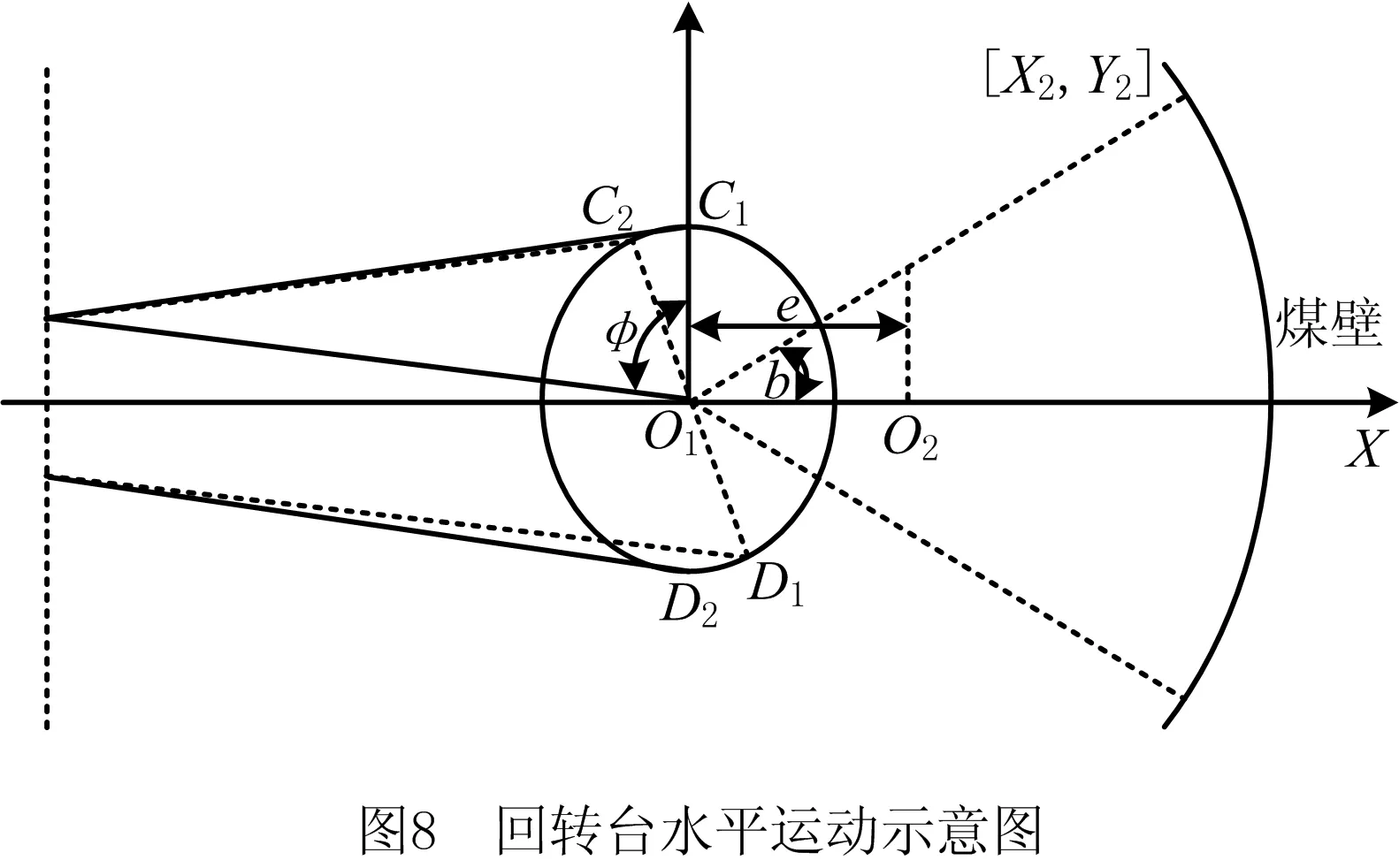
参考回转台水平运动示意图(如图8),根据余弦定理水平回转角度β的数学模型可以表示为:
(16)
悬臂式掘进机机身坐标分布如图9所示,以机身质心为坐标原点建立机身坐标系O0X0Y0Z0,回转台坐标系为O1X1Y1Z1,悬臂坐标系为O2X2Y2Z2,伸缩油缸坐标系为O3X3Y3Z3,截割头坐标系为O4X4Y4Z4。经过D-H解算[17]得到截割头中心位置在掘进机机身坐标系中的位置模型可表示为:
x=-(L3+L4+d)cosβsinα+H2cosβcosα+
L2cosβ+L1,
y=-(L3+L4+d)sinβsinα+H2sinβcosα+
L2sinβ,
z=-(L3+L4+d)cosα-H2sinα+H1。
(17)
式中:L1为掘进机机身中心在水平方向上到回转台中心的距离;L2表示回转台中心到截割臂抬升关节的水平距离;L3表示截割臂抬升关节到截割头伸缩油缸前关节的水平距离;L4表示伸缩油缸前关节到截割头顶端的水平距离;H1表示地面到抬升关节的距离;H2为截割臂抬升关节到截割臂水平的垂直距离;d为截割头伸缩油缸的伸缩量。

将式(15)和式(16)带入式(17)可以得到掘进机截割头的空间位姿,在虚拟现实交互平台读取虚拟掘进机截割头位姿,通过比较两组位姿数据,即可得到截割头的动态修正量,完成掘进机的实时修正。
3.5 碰撞检测模型
以掘进机运动学解算为理论依据,利用包围盒碰撞检测技术,分析设备的碰撞检测数学模型。根据工况环境设置合理的碰撞约束条件,在虚拟现实开发平台利用射线检测模块结合设备运行位姿数据,建立设备群之间的碰撞检测模型[18]。
在虚拟世界坐标系中为待检测的A,B两物体分别添加包围盒A(wa,ha,da)和B(wb,hb,db),使物体都处于各自的包围盒中,两物体的中点分别为Oa(Ax,Ay,Az),Ob(Bx,By,BZ)。包围盒边界总与x,y,z轴平行,lx,ly,lz分别表示A,B两物体中心点距离x,y,z轴方向分量,A,B两物体发生碰撞的条件为:
(18)
当两个碰撞体满足上式条件时,被检测物体将发生碰撞,操控人员需要提前控制设备当前的运动状态。
4 基于HCPS的人机协同控制策略
孪生体驱动的协同控制包括远程操控和人机协作两部分。借助VR技术构建“人、机、环”有机交互的虚拟煤矿井下多维空间,工作面变化及设备位姿数据实时反馈至虚拟监控平台,控制中心的操作者通过观察虚拟交互界面,实时修正设备运行轨迹,实现沉浸式远程操控和在线状态监测。通过对历史数据的挖掘分析,建立设备的超前预判系统,对碰撞等异常情况进行预警。
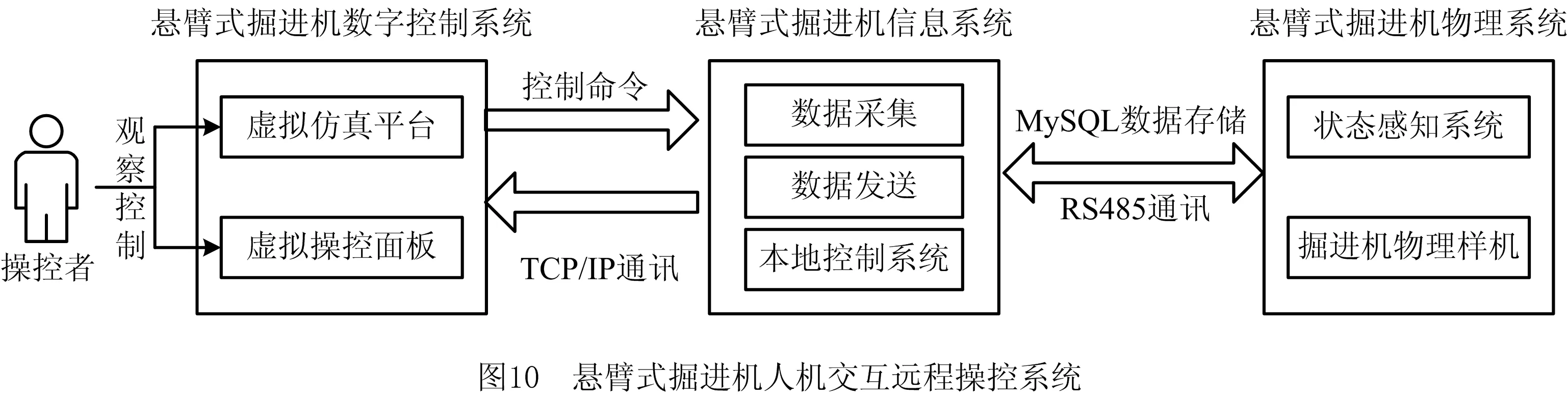
悬臂式掘进机远程智能虚拟操控系统借助捷联惯导、图像测量等多传感器融合获得掘进机机身和截割头的位置和姿态,在本地控制端建立多源异构数据融合矩阵,利用TCP/IP网络进行远程控制与数据传输,在远程控制端建立数字孪生体,实现虚拟掘进机与真实掘进机的有效结合,完成了可视化截割、远程控制与虚拟监控等功能,如图10所示。
基于虚拟工作台控制策略,利用虚拟现实图像用户界面(Graphical User Interface, GUI)技术,在虚拟可视化窗口中编写控制器虚拟按键,形成虚拟交互平台,实现泵站、刮板、星轮和截割的启动和停止、铲板升降、悬臂的各种动作、支撑的伸缩等真实的悬臂式掘进机所有功能,既有效融合人与环境信息,又解决了硬件成本问题。操控者可以通过虚拟操控台相应按钮或者控制杆,实现虚拟掘进机的控制,在虚拟场景中将控制命令和真机数据结合,运用控制策略实现掘进机虚实同步运动。
悬臂式掘进机人机交互远程操控时需要校准的模型参数包括虚实同步和传感系统两部分。前者利用物理掘进机的位姿等参数,“实时修正”虚拟场景的掘进机位姿,保证虚拟同步,为远程虚拟操控提供技术支撑;后者校准相关传感器,包括截割头视觉系统的内外参标定和捷联惯导的初始校准。传感器校准通常在系统运行开始阶段进行校准,理论上校准一次即可,实际应用中由于振动、人为等因素,推荐在每次换班时重新校准,以保证测量与控制精度。
5 悬臂式掘进机远程智能虚拟操控系统实验
5.1 系统实验平台搭建
为了验证系统功能,构建悬臂式掘进机远程智能虚拟操控系统实验平台,平台由掘进机、本地控制系统和远程虚拟操控软件组成。如图11所示,按照EBZ160型悬臂式掘进机5:1缩小的掘进机相关结构参数如表1所示。实验平台搭载的传感器主要有MV_EM130工业防爆相机,16点SE3470型红外LED标靶,GUC6矿用本安型超声波传感器,GJJ-5矿用本安型激光传感器,TM352型防爆组合捷联惯导装置等。选用三菱FX3U-64M型PLC控制器作为本地控制下位机,负责工作面数据的采集,控制命令的下发。

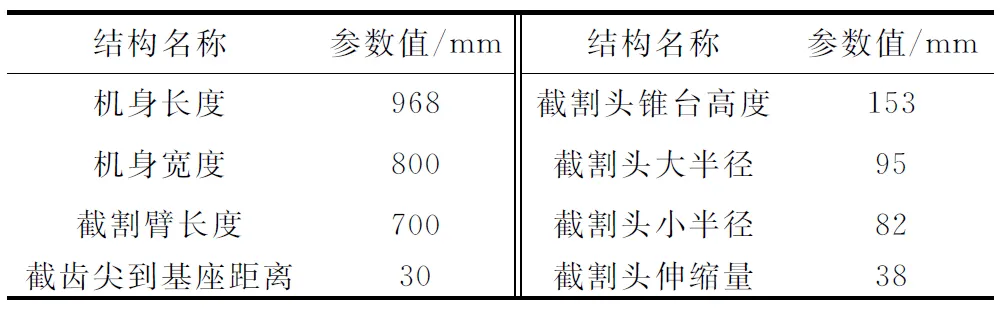
表1 悬臂式掘进机实验平台结构参数
远程虚拟操控软件基于Unity3D开发,如图12所示。远程控制时通过虚拟控制面板的按钮下发控制指令,感知系统获得掘进头实时姿态数据,驱动虚拟掘进机与实体掘进机同步运动。虚拟现实交互平台通过切换相机视角,从多角度观测掘进机工作状态。

5.2 远程监控系统功能验证
5.2.1 掘进机远程控制
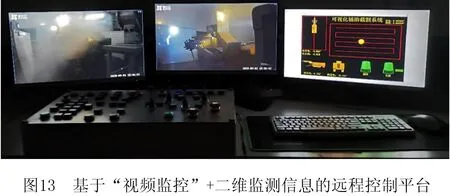
为了验证基于数字孪生的悬臂式掘进机智能操控技术优越性,本文模拟煤矿井下低照度、高粉尘的实际工况,搭建“视频监控”+二维监测信息的远程控制平台、虚拟远程控制平台进行对比实验。
(1)“视频监控”+平面信息远程控制
采用可视化辅助截割系统作为平面信息监测平台,辅以两个角度的监控视频信号作为监测手段,实现远程控制。图13所示为模拟井下低照度、高粉尘的环境搭建的远程控制平台。粉尘浓度过大,视频失效导致无法判断截割头位置,二维监测信息简单,难以用于远程决策。
(2)虚拟远程操控
搭建的虚拟远程控制平台如图14所示。在“视

频监控”+二维监测信息基础上增加虚拟操控平台。利用本地采集的掘进机状态信息驱动虚拟模型,以三维虚拟场景实现人机交互。视频信号不是主要决策依据,可以做到“无视”粉尘和水雾,借助虚拟场景中的碰撞检测实现碰撞预测,对复杂场景和设备群异常碰撞自主预测意义重大。
虚拟样机通过读取数据库信息,利用数字孪生技术建立掘进机动态修正模型从而驱动虚拟样机的运动,使虚拟样机与物理样机的运动姿态实时保持一致。掘进过程中,虚拟样机与物理样机在不同截割位置同步动作如图15所示。

5.2.2 可视化辅助截割功能实验
根据截割轨迹规划模型,建立掘进断面的截割轨迹。利用机身、截割头位姿检测结果,通过机器人逆运动学计算,将截割头实际的运动轨迹显示于虚拟现实交互界面,如图16所示。可视化辅助截割系统中,监测界面可以显示掘进机在巷道中位置的动态变化,以及掘进机机身的航向角、俯仰角和偏航角变化。
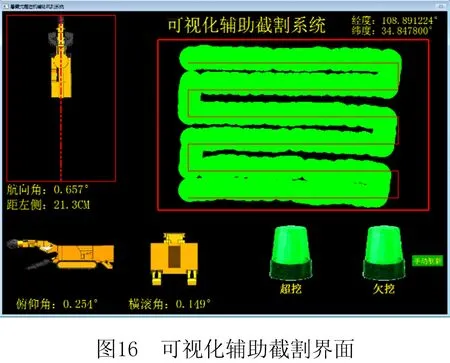
使用可视化辅助截割系统时,先设定掘进机机身和巷道断面参数,系统自动规划巷道截割轨迹,以S型路线呈现于可视化界面中,为操作人员提供截割轨迹导引。通过实时监测截割头位置,将位置数据与模拟截割轨迹对比,实现了超挖报警和欠挖报警功能。
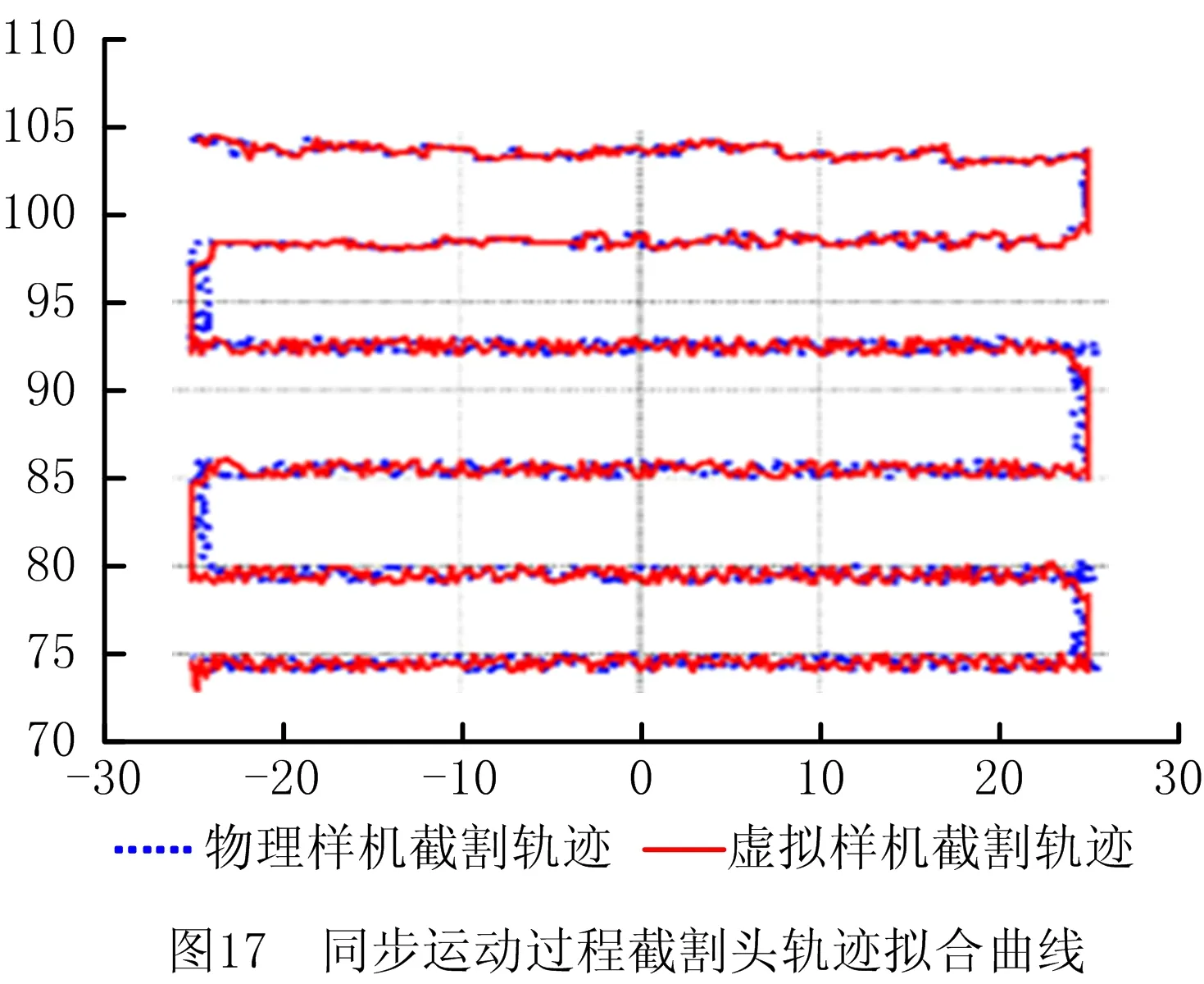
为验证掘进机操控过程中虚实同步功能和可视化辅助截割导引界面的准确性,采集了掘进机对一个断面截割过程的1330组数据。将表1的结构参数带入式(2)~式(4)计算出截割过程中实际掘进机截割头空间位姿,形成物理样机截割轨迹,同时在虚拟交互平台通过坐标转换实时显示虚拟掘进机截割头空间位姿,形成虚拟样机的截割轨迹,如图17所示为两种截割轨迹对比。由图17可见,物理样机和虚拟样机的运动轨迹基本吻合,验证了虚实样机截割头位置实时一致性。由于物理样机控制中存在的抖动和执行延迟因素,导致轨迹局部存在一定偏差,但是误差在40 mm以内,可以满足煤矿安全规程对井下巷道掘进的质量要求(小于±50 mm),达到了掘进机智能操控和可视化辅助截割设计要求。
6 煤矿掘进机器人系统虚拟操控系统实验
国内煤炭生产中“采掘失衡”问题突出,目前行业集中攻关的巷道快速掘进系统着眼于实现截割、锚钻、支护、运网、通风除尘和辅助运输的协同作业。由于生产工艺复杂,涉及多个设备的协同控制,监控和远程操作的复杂度高,急需远程智能决策和有效的人机协作手段。笔者团队针对陕煤渝北煤业小保当1号煤矿片帮与夹矸并存的地质条件,研发了煤矿智能掘进机器人系统,包括截割机器人、临时支护机器人Ⅰ和Ⅱ、钻锚机器人、锚网运输机器人、电液控系统、运输系统、通风除尘系统等子系统,如图18所示。

系统以截割机器人为控制核心,各子系统进行掘—支—运平行作业,以本文阐述的HCPS理念构建了数字孪生系统监控平台,实现了掘进、盾体移动、钻锚支护与锚网运输等环节实时监测与自动控制,具有人员安全提示、设备碰撞预警、异常状态远程人工干预等功能。如图19所示为数字孪生驱动的煤矿智能掘进机器人地面远程监控室。该系统已经通过地面联调,目前正在井下进行生产运行。

7 结束语
针对悬臂式掘进机智能控制中面临的远程操控问题,本文研究了基于DT+VR的煤矿井下悬臂式掘进机远程监控技术,通过实现掘进工作面物理空间与掘进信息虚拟空间的深度融合与交互,形成了面向悬臂式掘进机智能控制的HCPS交互机制,初步实现了设备远程虚拟操控技术路线,为煤矿井下设备远程监控提供了新思路。主要结论如下:
(1)结合数字孪生和虚拟现实技术,提出基于HCPS智能交互体系结构,构建数字孪生驱动悬臂式掘进机远程操控系统,将掘进工作面人—信息—物理系统信息进行有效融合,达到了采掘工作面环境的真实再现,实现了掘进设备远程监测、控制功能,该方式对实现煤矿井下危险环境少人或无人作业提供了技术保障。
(2)以悬臂式掘进机为对象,构建智能感知平台及数字孪生驱动模型,利用VR整合多源数据实现智能远程掘进,其中物理空间数据感知与互联、虚拟世界掘进工作面建模与驱动,呈现了“数据驱动、虚实同步、实时修正、碰撞预测”的远程监控系统使能技术,对实现数字孪生驱动的设备远程操控具有一定的借鉴意义。
(3)搭建的悬臂式掘进机远程控制实验验证了数字孪生技术在煤矿设备交互控制方面应用的可行性。将该技术体系推广应用到煤矿智能掘进机器人的远程监控系统,已通过现场联合试运转,实现了掘—支—运平行作业,目前正在煤矿井下生产中运行。
下一步研究将加大对设备监测数据的分类分析和利用,在实现数字孪生系统“数化”、“互动”的基础上,深入研究设备之间、人机之间的碰撞检测,以及设备状态预警等内容,丰富和深入“先知”、“先觉”,达到数字孪生更高的成熟度,促进煤矿少人或无人生产的发展步伐。
