鱼塘保姆系统设计
2021-06-30桂林电子科技大学信息科技学院刘苏芮贺文翔李宏辉韩桂明
桂林电子科技大学信息科技学院 刘苏芮 贺文翔 李宏辉 韩桂明 唐 力
本作品操作简单,界面简洁,可以使鱼塘管理人员快速上手操作;运用物联网技术搭建基于华为LiteOS的综合智能化鱼塘管理系统—“鱼塘保姆”实现对鱼塘进行保姆式的智能化管理,在大大降低养殖户养殖成本和日常维护成本的同时增加产量,改变水产养殖户过去养鱼仅凭经验,靠天吃饭的命运。
1 整体方案设计
本系统利用物联网、嵌入式、互联网等相关的先进技术来对鱼塘的水产养殖进行全方位的实时监测和调控,当发现异常时可以自主的尝试解决问题,并通知用户,这样不仅保障了水产养殖的安全问题,同时对水产养殖做到了实时化、智能化、网络化、集约化,水产养殖的增产创收将不再是困难之事。
2 方案选择分析
综合需求分析以及现实情况和鱼塘水产养殖的特点,系统设计以物联网设备和相关技术手段为主,在保证先进性和可用性的同时尽量降低学习和使用的成本,向用户提供友好的用户界面和操作方式。所以研究重点在于系统设计和整个水产养殖的物联网化的方案设计以及确定相关的逻辑和操作方式。整个系统主要由控制的软件方案、用户的使用逻辑和整个系统的逻辑、硬件驱动电路这三大部分组成。整个系统框图如图1所示。

图1 整体功能实现框图
3 实现原理
3.1 数据采集
通过安装在鱼塘保姆载体的船身上的传感器进行数据采集,并在船身的控制系统中对数据进行初步的处理,然后按照特殊的序列和格式将数据进行上传,并对整个载体的本身进行自检和自我监控。主要是安装于项目硬件载体小船的水面下部的先关水质传感器,如TDS、溶解氧、浑浊度、温度等,通过获取个传感器的数据并对数据进行分析汇总,交由一块统一主控板进行管理上传数据、上报至云端平台,云端的数据可以由手持终端进行远程查看,同时也可以使用手持终端对船体的运动单元进行控制。
3.2 执行控制
系统的执行机构主要分为两个单元。
单元一:支撑整个系统优越性能的运动机构,运动单元负责将整个系统的巡航功能,巡航不间断测量是该测量方式的优越性所在。内陆鱼塘水域往往具备:鱼塘面积可控、水体流动性不强、区域性水质偏差较大的特点。因此无论是是传统的手动水质测量手段,还是目前普遍流行的在线监测都难以克服这些问题所带来的缺点。固定点检测的数据往往只能代表测量点周边的水域情况,无法代表整体情况,倘若控制手段的依据来源于这些不标准、不普遍的数据作为依靠往往调控的结果是南辕北辙的。而在现今的科技手段之下,水质相关传感器都是很贵的,在线监测难以通过增加测量点的方法提高测量精度。
单元二:鱼塘管理设施执行器件。包括两种方案,一是通过研究传统的鱼塘管理设施,加上物联网的手段,通过433M等的通信手段与主控进行通信,由主控进行统一管理,从而实现手持端与主控通过云端数据交换来形成本地和云端控制手段,此种方案会增加一部分成本,但是具有更好的统一性,也能更方便的管理各设施。方案二是通过增加具备与主控通信能力的,输出布尔信号的控制板来对设施进行控制,这样可以最大限度的保留控制能力同时尽可能的降低使用成本。
3.3 巡航功能实现
巡航功能主要通过APM控制板实现,APM是一款完全开放的系统,配合地面站Mission Planner,可在多种环境工作。在地面站中可以进行固件烧写、基本参数调节,还可以通过无线数据传输系统在地面站与APM系统之间实现数据传输,组成一套完整的船体自动控制系统。它的软件部分是由DIY Drones社区创造,硬件由3DRobotics设计、制造和销售的嵌入式系统与外围传感器,能够控制稳定性和导向性。其整个硬件板电路结构如图2所示。

图2 APM控制板电路框图
在APM系统中,采用的是两级PID控制,第一级是导航级(导航回路),第二级是控制级(姿态回路)。导航级首先要明确船体器的行进路线,以及转弯角度的大小,通过内部算法给出目标需要执行的俯仰角、油门以及目标滚转角,再交给下一级的控制级(姿态回路)进行控制。而控制级接收导航级发送的目标路线数据,并采集船体器目前位置信息,通过内部姿态解算,计算出用于实时控制电机运动的PWM脉冲信号,调整船体的转向角度,使船体按照预定的轨迹路径进行航行。
3.4 软硬件系统实现
载体小船的所有外接通讯手段都用无线的通讯方案,采用无线联网的方式进行数据云端上传。本系统通过使用NodeMCU将设备联网上云,它的硬件电路设计简单,具备高性能低价格、低功耗的特点,NodeMCU通过串口与主控板STM32F103ZET6相连接,从而使得主控具备了与云端数据中心交换数据的能力,实现远程控制。其中与云端交换数据的通讯协议,依据通信需求特点MQTT是非常合适的联网方案,该方案的特点是低占用、低带宽的及时通讯协议,其通讯原理框图如图3所示。
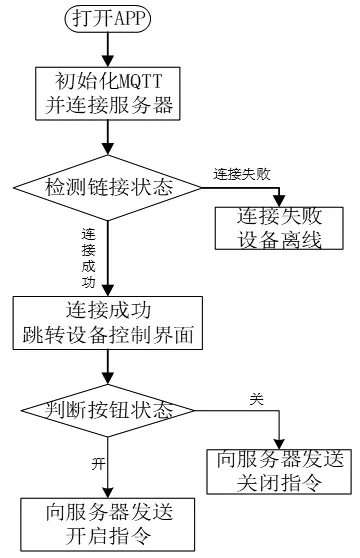
图3 MQTT数据交换流程
同时主控会通过串口二与APM巡航控制进行数据交换,以及通过片内相关外设和相关的通讯接口获取传感器数据,用STM32作为整个控制中心,将所有电路有机的串联在一起,从而实现整个系统的功能。
为了提高整个系统的可靠性和可维护性,以及基于整个系统模块化的设计理念,系统的核心软件运行于LiteOS嵌入式实时操作系统。LiteOS是华为面向物联网领域开发的一个基于实时内核的轻量级操作系统。本作品使用华为物联网操作系统Huawei LiteOS,其现有基础内核支持任务管理、内存管理、时间管理、通信机制、中断管理、队列管理、事件管理、定时器等操作系统基础组件,更好地支持低功耗场景,支持tickless机制,支持定时器对齐。将系统移植到硬件平台后,将各个需求作为系统模块加入任务进程,从而使得这个系统具备了较高的可升级性能以及稳定性。如图4所示。

图4 LiteOS系统框图
结论:本作品从养殖户的实际需求出发,通过软硬件结合,设计实现了了操作简单、界面友好、经济绿色的基于LiteOS的综合智能化鱼塘管理系统—“鱼塘保姆”。围绕设施化水产养殖场的生产和管理环节,通过智能传感器在线采集水产养殖场环境信息(溶解氧、水温、PH值、TDS等),同时集成改造现有的水产养殖场环境控制设备(增氧泵、循环泵、投料机等),实现水产养殖的智能生产与科学管理。
