太阳能电池板双轴自动跟踪系统
2021-06-30临沂大学物理与电子工程学院董士韦董佳乐王法社
临沂大学物理与电子工程学院 董士韦 刘 畅 刘 冰 董佳乐 王法社
本设计是太阳能电池板双轴自动跟踪系统。以AT89S52单片机为控制核心。由光敏传感器、模数转换电路、单片机控制电路、步进电机和电机驱动电路等模块构成系统硬件。传感器采用光敏电阻作为光-电转换器件。利用四个完全相同的光敏器件组成4个对称监测点,对不同监测点的光照强度进行采集,利用PCF8591芯片将电压信号转换为数字信号送入单片机。在单片机控制电路的控制下驱动方位角调整机构和高度角调整机构实现相应的位置调整。系统在设计上具有结构简单、操作方便和功能可扩展等优点。
我国在太阳能光伏发电的应用和研究方面起步较晚。近些年以来,我国加大对光伏产业的投入,使得我国太阳能发电行业发展迅速。已经成为全球光伏发电装机容量和新增装机容量最大的国家。太阳能资源作为清洁能源有巨大的市场需求和应用前景。
传统固定的太阳能电池板的缺点是易受自然因素的影响,且太阳能的利用率较低。提高光电转化效率是提高太阳光的采集效率最直接有效的方法,因此高效率的光电转化系统的设计对提高太阳能的利用率具有重大应用意义。设计保持光线实时与太阳能电池板保持垂直的系统能够有效提高太阳能的利用率和光电转化效率。随着单片机控制技术快速发展,基于单片机设计跟踪机构进行方向控制,实时调整太阳能电池板和光线的角度,达到高效利用太阳能的目的。系统设计目标就是实现实时自动调整最大采光角度,从而高效利用太阳能。研究表明:太阳光的跟踪控制和固定的太阳能电池板相比,能量的接收率提高接近40%,所以,设计自动跟踪控制系统可以有效提高太阳能装置利用效率,拓宽太阳能的应用领域。
太阳能电池板跟踪的实现方法主要有两种。第一种是太阳运动轨迹跟踪,利用不同经纬度地区的天文学数据,计算太阳运动轨迹的理论值,控制装置根据轨迹实现太阳跟踪。该跟踪方式是基于开环控制的跟踪方法,有较高的可靠性和环境适应性。但是,太阳角度的计算存在误差,无法进行误差修正,会造成误差的不断积累,影响跟踪精度。第二种是光电跟踪,原理是利用光敏元件来检测光线强度,控制跟踪装置追踪太阳光线的运行。将光敏电阻安装在遮光挡板不同位置,调整挡板的位置,保证太阳垂直入射。随着太阳方位发生偏转,不同位置监测点会检测并输出不同的光照强度信号。根据不同监测点信号差来控制跟踪机构做相应的调整,保证太阳能电池板与光线始终保持垂直。光电跟踪采用闭环控制形式,有较好的跟踪灵敏度,可以实现全自动跟踪太阳轨迹。
本设计采用光电跟踪方法,利用光敏器件采集不同位置光强度,采用电、机、光集成技术,实现方位角和公度角方向的双轴跟踪。实现全自动跟踪控制。控制系统将具有实时时间、日期采集、方位角、高度角计算、自充电功能、显示运行状态(运行、停止、返回);实时数据显示、数据通信等功能。
1 总体设计
本设计双轴跟踪系统,在两个步进电机的控制下,能够实时实现在方位角和高度角两个方向进行位置跟踪。多个光敏电阻测量光强度,光电转换电路把光强度值转变成电压值。根据不同位置的电压差值,单片机控制电路驱动步进电机正反转。调整太阳能板的方位角及高度角,实现太阳能板始终与光线垂直,如图1所示。如果两个监测点光敏电阻接收到的光照强度相等或他们之差小于精度值。单片机停止驱动电机转动。如果光线与采光板不垂直,两个监测点光敏电阻接收到的光照强度不相等或他们之差大于精度值,单片机驱动电机向光强度较高的一侧运动,直至光照强度信号相同。从而实现自动调节的目标。

图1 总体设计结构图
设置当系统处于光线较弱或夜晚或低于最低设定值时,停止对光信号的采集和电机的驱动。
2 硬件设计
2.1 单片机控制电路
晶振电路为AT89C52单片机提供时钟信号,引脚XTAL1和XTAL2是放大器的输入和输出端。外部电容C22,C23将容量设置为30Pf。复位电路电容C1两端接一个按键即可,当按下按键时,电容被短路,RST引脚接收到高电平信号,可以实现复位。EA接VCC。如图2所示。

图2 单片机最小系统
2.2 光照采集电路
设置A、B、C、D4个光监测点,光检测点A对左远离光线进行检测,光电检测A、B实现光线水平方向角度变化检测,光检测C与D对太阳垂直角度的变化检测。将检测到的光线变化信号通过PCF8591传输给单片机,单片机进行数据处理后控制驱动芯片ULN2803控制电机正反转,实现太阳能电池板垂直和水平角度调整。四个光敏电阻在太阳能板四个方向对称放置,A、B的检测值控制方位角控制电机,C、D控制高度角控制电机,如图3所示。

图3 光敏电阻分布模型
光敏电阻D4-D7和PCF8591的AIN0-AIN3相连。PCF8591是具有I2C总线接口的8位A/D转换芯片,靠时钟线SCL和数据线SDA就可以实现和AT89C52单片机的数据通信。如图4所示。

图4 光电转换电路
2.3 A/D转换电路
PCF8591芯片具有4路8位逐次比较型A/D输入,1路8位D/A输出,最大转换速率约为11kHz。具有4个模拟输入,1个串行I²C总线接口。PCF8591硬件芯片的地址编程通过3个址引脚A0、A1和A2实现。
通过双向I²C总线以串行的方式进行传输地址、控制和数据信号。P.0连接SDA引脚,P1.1接SCL引脚,A0-A2接地,如图5所示。
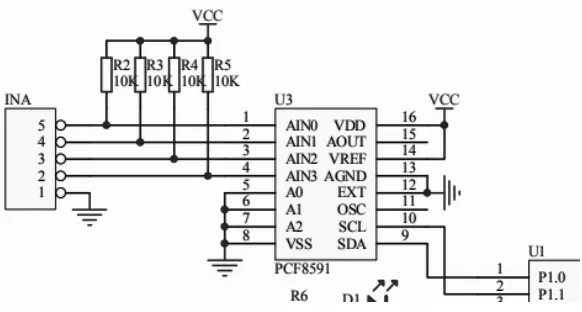
图5 PCF8591电路连接图
2.4 步进电机驱动电路
ULN2803构成步进电机的驱动电路,如图6所示。ULN2803芯片符合TTL标准,为反向输出型电路。一个ULN2803可以驱动2个步进电机,P2口接驱动芯片ULN2803的输入端。

图6 步进电机驱动电路
2.5 充电模块电路
采用CN3791充电管理模块,应用充放端口共用技术,以及同步整流技术,外围元件少。
高端技术MPPT太阳能大功率跟踪充电管理芯片,具有涓流、恒流、恒压充电管理。B+接锂电池的正极,B-接锂电池的负极。SUN+和SUN-接负载,电池从B+B-上短开再接上的话需要充一下电以激活保护电路,如图7所示。
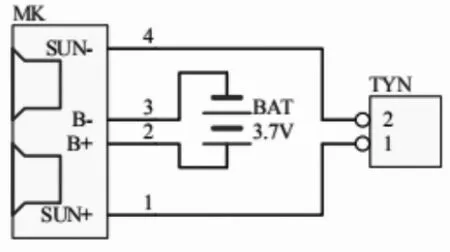
图7 充电模块电路
3 软件设计
首先系统进行初始化。然后A、B、C、D四个监测点的光敏电阻测得不同的电压值U1、U2、U3、U4。设精度为a。通过比较U1、U2、U3、U4的大小控制电机正反转动,系统进入光电追踪模式。系统主流程图如图8所示。
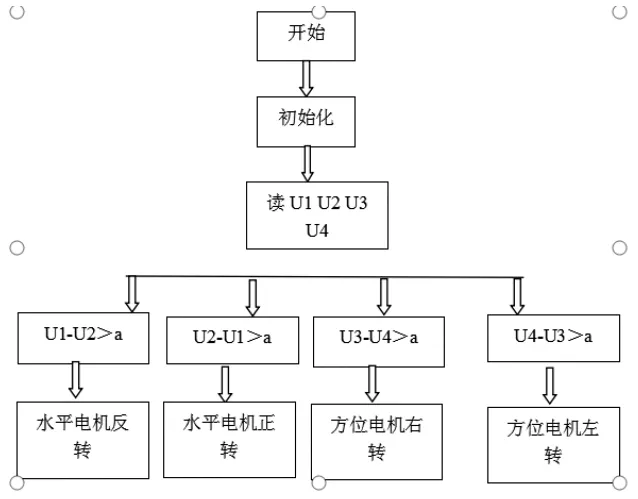
图8 软件流程图
3.1 模数转换程序
模数转换是本设计的关键部分,A/D转换使用芯片PCF8951。模拟多路输入经过PCF8951芯片电压采样,输出数字信号。流程图如图9所示。因为有四个通道,所以程序设计由四个部分组成,每个通道的编程方法相同。以0通道为例,首先读取PCF8951芯片通道所采集的到模拟量的值,控制发送字节0x41,用RecvByte接收读取A/D转换的数据。因为芯片PCF8951输入和输出都进行电压保持采样,系统内部也进行了两次采样,为了保证输入和输出数据相同,确保数据的准确性。输出电压需要RecvByte(PCF8591)*2。用ADC寄存器来寄存每一通道输出的数据。手动模式或其他模式下的操作可以放在最后一个if语句。

图9 A/D模块流程图
3.2 电机驱动程序
电机是将电信号转变成角位移或线位移的开关控制元件,脉冲信号的频率和脉冲数决定电机的转速、停止位置。A、B、C、D四个不同位置光敏电阻测得不同电压值。如果C监测点测得电压值大于D监测点的监测值,并且差值大于精度值或者手动模式下按下向下的按键,水平电机向下转动。若D监测点电压大于C监测点电压,并且差值大于精度值或手动模式下按下向上的按键,水平电机正转。同理,A监测点电压大于B监测点电压,两者差值大于精度值,或手动模式下按下向右的按键,方位电机右转。若A监测点电压小于B监测点电压,两者差值大于精度值,或手动模式下按下向左的按键,方位电机左转。控制步进电机上转的程序如图10所示。
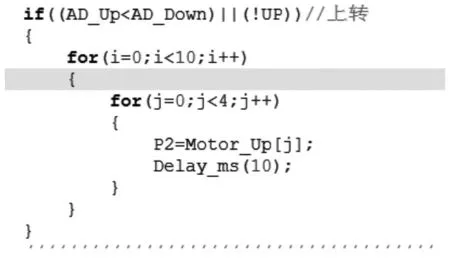
图10 步进电机上转控制程序
3.3 电压采样程序
A/D电压采样由串行数据线SDA和串行时钟线SCL来实现,即二线制总线。SDA和SCL都是双向线路,连接到总线上的每一个器件地址唯一,根据唯一地址可以寻址每一个器件。既可以作为一个发生器,也可以作为接收器。连接到总线上的器件的串行数据线和串行是中线端必须是漏极或集电极开路型。利用I2C总线方式传输数据,传输速率可达100Kb/s。每传输一个数据位必须产生一个时钟脉冲。时钟线SCL的高电平期间SDA线上的数据必须保存稳定。发送到SDA线上的数据为8位数据,不限制发送的字节数量。从机接收完一个字节后,从机向主机发送应答位,主机在收到从机应答后,才能发送第二字节数据,发送数据应先发数据的最高位。数据传输中,应答位由从机产生,应答的时期间,主机应释放SDA线,使其为高电平。应答时,数据线SDA电平为低电平。ADC读字节数据函数流程图如图11所示。

图11 ADC读字节数据函数流程
结论:本设计是太阳能电池板自动对光跟踪系统,在以前研究的基础上做了改进和实物设计。采用光电检测双轴追踪模式,提高了系统的追踪精度。利用4个光敏电阻构成2组比较电路,实现判断光照角度的目的。使用STC89S52单片机作为整个系统的控制核心,采取传统的硬件和软件相结合的开发方法。系统硬件设计简单,软件程序指令快速简单,驱动能力强等优点。增加了自供电模块,为太阳能电池板自动对光跟踪设计提供了一种解决方案。
