基于弹性核凸包张量机的机械设备热成像故障诊断方法
2021-06-30何知义邵海东程军圣
何知义 邵海东 程军圣 杨 宇
1.湖南大学汽车车身先进设计制造国家重点实验室,长沙,410082 2. 湖南大学机械与运载工程学院,长沙,410082
0 引言
随着智能制造的大力发展,人们对机械设备全天候安全运行的要求也越来越高。一旦机械设备出现故障即使是局部潜在故障,都可能带来不可估量的灾难性后果[1-2],因此,机械设备的智能状态监测与诊断具有重要的意义[3]。
近年来,热成像图像作为机械设备智能故障诊断一个新的监测目标,引起了有关研究人员的关注[4-5]。相比于传统振动信号采集中的接触式测量,热成像过程是非接触式测量,为机械设备的监测与诊断提供了更便利的测试手段。因此,一些学者提出了基于热成像图像的机械设备故障诊断方法。NASIRI等[6]将热成像图像作为卷积神经网络(convolutional neural network,CNN)的输入来识别冷却散热器的健康状态;JANSSENS等[7]提出了基于CNN和热成像图像的机械设备健康监测方法;JIA等[8]构建CNN来识别热成像图像,进而完成转子系统对应健康状态的故障分类。
目前,基于热成像的机械故障诊断方法主要基于不同的深度学习方法,虽然在机械设备故障诊断中取得了一定的成果,但存在两个主要问题:①需要大量的热成像图像样本对深度学习网络进行训练,而在实际工程应用中很难获取大量的故障样本信号;②深度学习方法往往将图像向量化后作为网络的输入,或将学习得到的特征直接向量化并作为分类器的输入来进行分类识别,而热成像图像本质上是高阶张量信号,对热成像图像的向量化或图像特征值的向量化不仅会带来维数灾难等问题,也会破坏图像张量结构的内在信息[9]。针对上述两个问题,一种既适用于小样本识别,又能直接处理高阶张量信号的识别方法——支持张量机(support tensor machine,STM)[10]引起了众多学者的关注,并成功用于人脸图像识别[11]、人体姿态识别[12]以及卫星图像异类检测[13]等领域。STM本质上是支持向量机(support vector machine,SVM)扩展得到的,因此STM同SVM类似,从几何模型上来看都是利用凸包模型来估计每一个类别,而凸包对每一类别都是一个典型的欠估计。此外,STM算法还存在对离群点的泛化能力差和鲁棒性差的缺陷。针对上述缺陷,文献[14]定义了一种新的弹性凸包,并提出了最大间隔弹性凸包分类 (maximum margin classification based on flexible convex hull,MMC-FCH) 方法,但这种方法和SVM类似,只能处理向量空间分类问题。
受STM和MMC-FCH启发,本文首先构建弹性核凸包张量机(flexible kernel convex hull based on tensor machine,FKCH-TM),相比于STM,FKCH-TM对样本类别的估计更为松散,模型本身也具有更好的泛化能力。然后直接以机械设备的热成像高阶图像为对象,提出基于FKCH-TM和热成像图像的机械设备故障诊断方法。机械设备故障热成像图像数据的实验分析验证了本文方法的有效性。
1 FKCH-TM方法原理
1.1 弹性核凸包
N阶张量X∈RI1×I2×…×IN通过下式投影到Hilbert空间即为特征张量空间:
φ:X→φ(X)∈RH1×H2×…×HP
(1)
在此特征张量空间中,φ(X)的阶次可能与X的阶次不同,即P≠N;φ(X)每个模的维度可能更大。
首先考虑特征张量空间的二分类问题,假设正负张量样本集为{(X+i,yi)|i=1,2,…,l+}和{(X-i,yi)|i=1,2,…,l-}(其中,yi∈{+1, -1}是样本对应的标签,l+、l-为正负样本集的样本数量),首先根据式(1),X+i和X-i投影到特征张量空间φ(X+i)和φ(X-i);然后正负张量样本集的弹性核凸包(flexible kernel convex hull,FKCH)分别定义为
(2)
(3)
式中,α+i、α-i为正负弹性核凸包的组合系数;λ+、λ-分别为正负弹性因子,λ+=λ-≥1。
1.2 弹性核凸包张量机
对于H(φ(X+))和H(φ(X-))的二分类问题,需要找到H(φ(X+))和H(φ(X-))之间的一个最优分类超平面。为此,首先找到H(φ(X+))和H(φ(X-))之间的最近邻点,并将最近邻点问题表述为如下的优化问题:
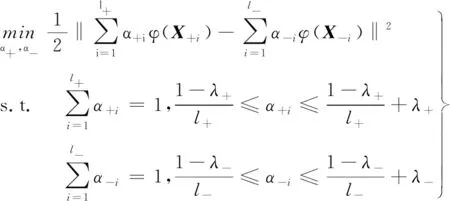
(4)
为求解上述优化问题,将式(4)展开:
(5)
由式(5)可以发现,φ(X+i),φ(X-i)∈RI1×I2×…×IP的阶次P=1时,优化模型(式(5))退化为向量分类器MMC-FCH的非线性形式。〈φ(Xi),φ(Xj)〉是φ(Xi)和φ(Xj)的核张量内积,可表示为κ(Xi,Xj)。相应地,式(5)可以转化为
(6)
式(6)中优化模型的主要目的是在特征张量空间寻找一个最优的分类超平面,此模型可称作为弹性核凸包张量机。虽然κ(Xi,Xj)可以通过Xi和Xj中元素的相乘来直接进行张量内积计算,但是这就等同于将Xi和Xj直接向量化。这种情况会带来维数灾难等问题,更为严重的是,Xi和Xj的原始张量结构信息会被破坏。

(7)
(8)
(9)
因此,核张量内积转化为
(10)
在式(10)的基础上,式(6)可以转化为
(11)


(12)
(13)
最后,FKCH-TM方法的决策函数可以表示为

(14)
任何测试张量样本X的标签可以通过决策函数计算得到。同时,一些类似向量空间的普通核函数可以应用到FKCH-TM方法中。本文利用高斯核函数来计算内积,因此,核张量内积可以表示为
(15)
针对多分类问题,FKCH-TM利用SVM中一对一的思想将该二分类器扩展为张量空间的分类器。对于含有p类样本的多分类问题,通过一对一的思想,分别构建p(p-1)/2个二分类器,最后采用投票的方式将测试样本分到得票最多的类别中。此外,可以用一对多等其他的策略来将其扩展为张量空间的多分类器。
2 基于FKCH-TM的机械设备热成像故障诊断方法主要步骤
以热成像的图像为FKCH-TM方法的输入对机械设备故障进行诊断识别。基于FKCH-TM的机械设备热成像故障诊断方法主要步骤如下:
(1)利用热成像相机拍摄机械设备一定转速下不同故障类型的热成像图像。
(2)提取每张图像的感兴趣区域,得到感兴趣区域图像样本。每张图像为一个32×64×3的三阶张量。
(3)将每种工况下的样本分成随机分成训练样本和测试样本。
(4)利用训练样本训练FKCH-TM,得到FKCH-TM的决策函数。
(5)根据决策函数对测试样本进行故障识别与诊断。
3 实验验证
3.1 实验设置
使用GUNT PT500机械诊断系统(图1)进行不同故障的模拟实验。热成像相机FLIR Ax5的分辨率为320像素×256像素,距轴25 cm,相机摄像头聚焦在轴和对应轴承。用于热分析的软件ResearchIR能控制相机拍摄照片和视频,并确定温度参数,实验中用户选择的温度窗口为28~38 ℃。实验模拟正常状态、轴承外圈故障、轴承内圈故障、轴承滚动体故障、轴不平衡故障、轴承外圈和轴不平衡的混合故障、轴承内圈和轴不平衡的混合故障、轴承滚动体和轴不平衡的混合故障,实验转速为2000 r/min。
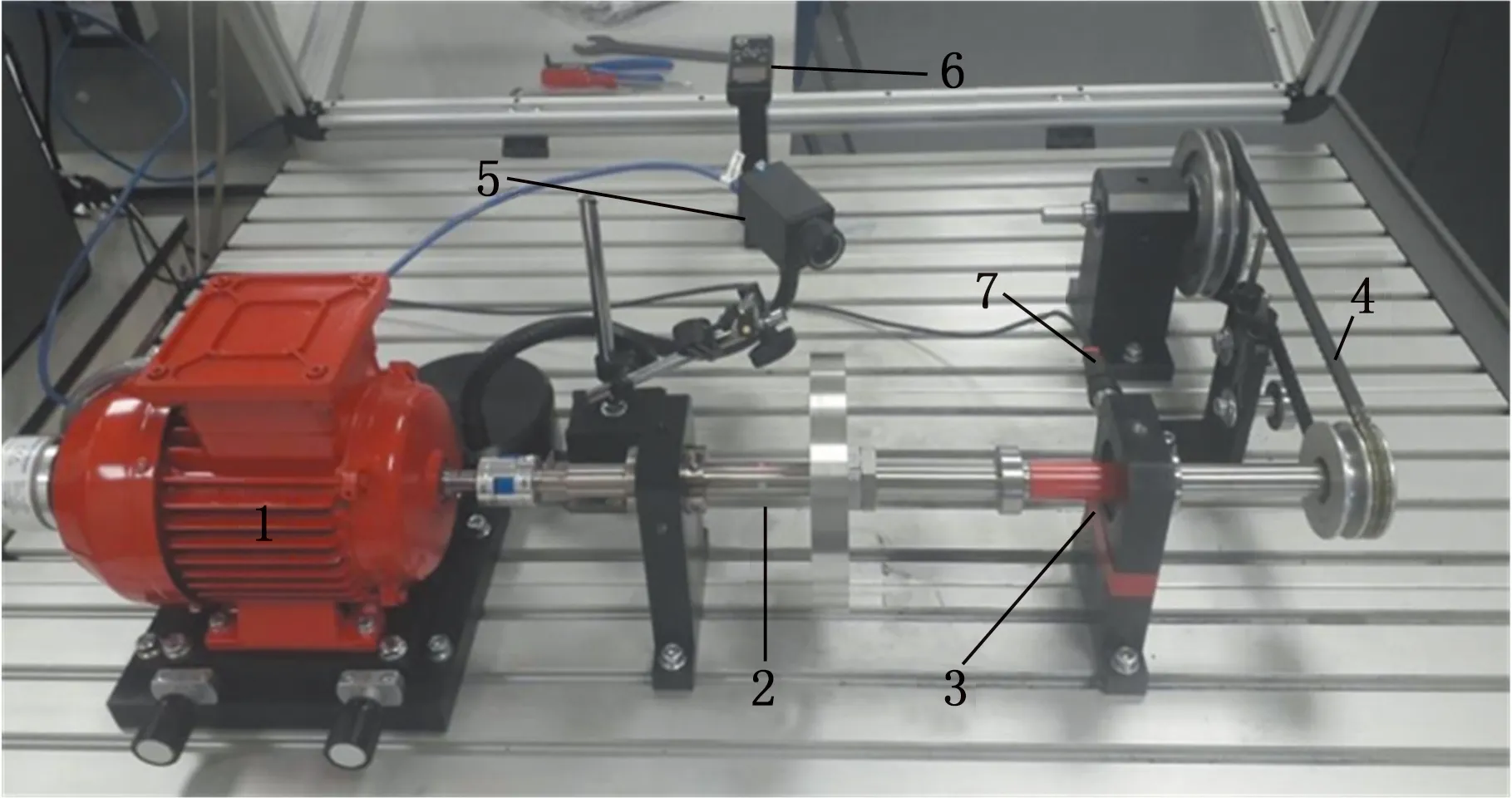
1.电机 2.转轴 3.滚动轴承及其支架 4.皮带 5.热成像相机 6.录音机 7.加速度传感器
3.2 实验数据描述
图2为热成像相机拍摄的图片,为更好地体现不同工况下照片的特点,选取不同工况下照片的感兴趣区域,见图3。每张图片的感兴趣区域像素为32×64×3。
图2 热成像相机拍摄图片

(a)正常状态(b)轴承外圈故障
将每种状态下的感兴趣区域图片分为训练样本和测试样本进行故障分类,同时,为更好地体现提方法的有效性,选择5种不同数目的训练样本进行5组不同的故障识别实验。5组实验数据详细信息如表1所示。
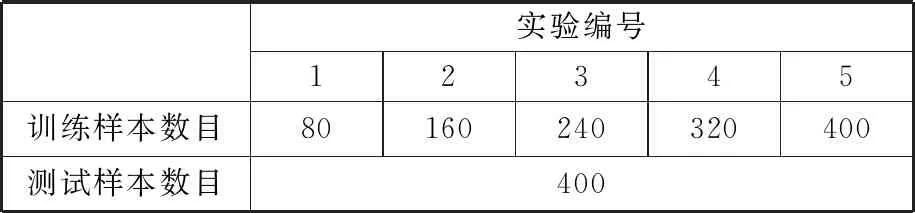
表1 实验数据详细信息
3.3 FKCH-TM方法参数讨论
为选择FKCH-TM中合适的弹性因子,讨论5组实验中不同弹性因子对诊断分类结果的影响。图4所示的平均诊断结果中,STM和FKCH-TM直接以三阶张量图片为输入进行训练和分类,SVM和MMC-FCH将三阶张量热成像图像直接向量化后的向量样本作为模型的输入。每组实验中的训练样本和测试样本都随机抽取10次,并以10次的平均诊断结果为最终结果。
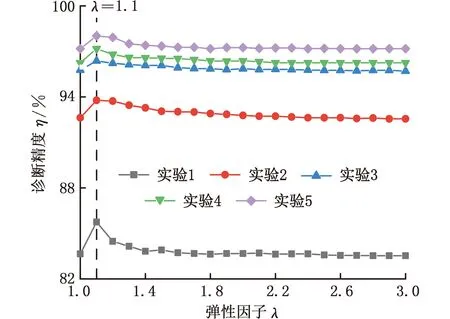
图4 FKCH-TM的诊断结果
由图4可以发现,随着弹性因子的增大,5组实验的平均诊断结果都是先增大后减小,因此,5组实验中,弹性因子λ都选取获得最佳平均诊断分类结果时的值1.1。各种分类方法的核参数都是自适应从2-2、2-1、…、28中选取的。
3.4 实验结果与分析
不同方法在各自最优参数下5组实验的平均诊断结果如表2所示。
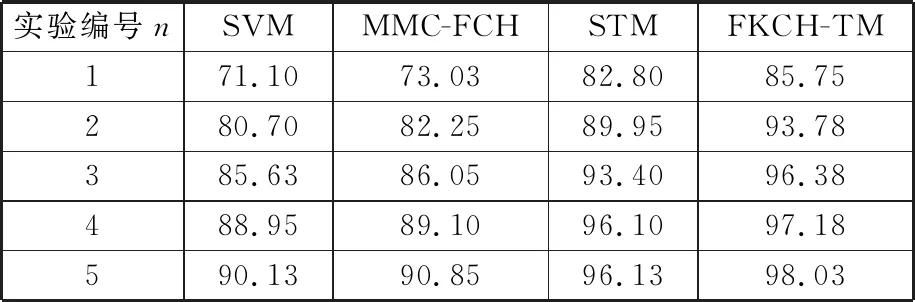
表2 不同方法的平均诊断结果
从诊断结果可以看出,张量分类器FKCH-TM和STM的诊断结果较向量分类器SVM和MMC-FCH的诊断结果具有显著的优势,这是因为原始张量热成像图片的向量化破坏了其原始的张量结构信息,因此,张量分类器直接以三阶张量热成像图像作为模型输入来进行诊断分类,能取得更好的诊断结果。
FKCH-TM的诊断结果(85.75%、93.78%、96.38%、97.18%、98.03%)都优于张量分类器STM的诊断结果,这进一步表明FKCH-TM在机械故障诊断中的有效性。
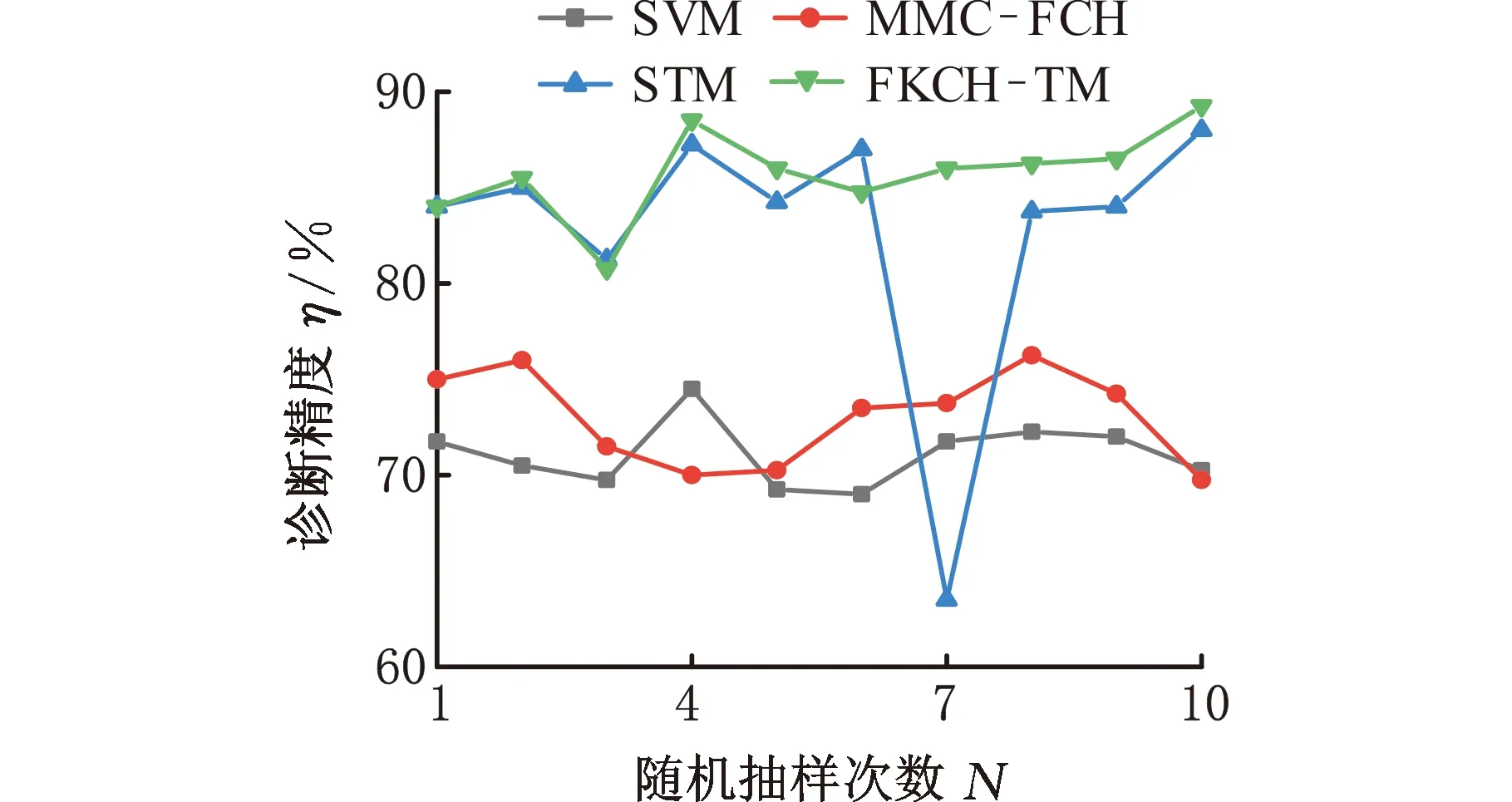
为进一步对比各种方法的诊断结果,图5展示了不同方法每组实验中10次随机抽样诊断的详细结果,不同方法在每组实验中10次随机抽样诊断结果的标准差如图6所示。由图6可以发现,除了第1组和第2组实验外,FKCH-TM的其他3组实验诊断结果的标准差最优,说明FKCH-TM方法在实验中取得最优的诊断结果,而且具有很好的稳定性。
(a)实验1
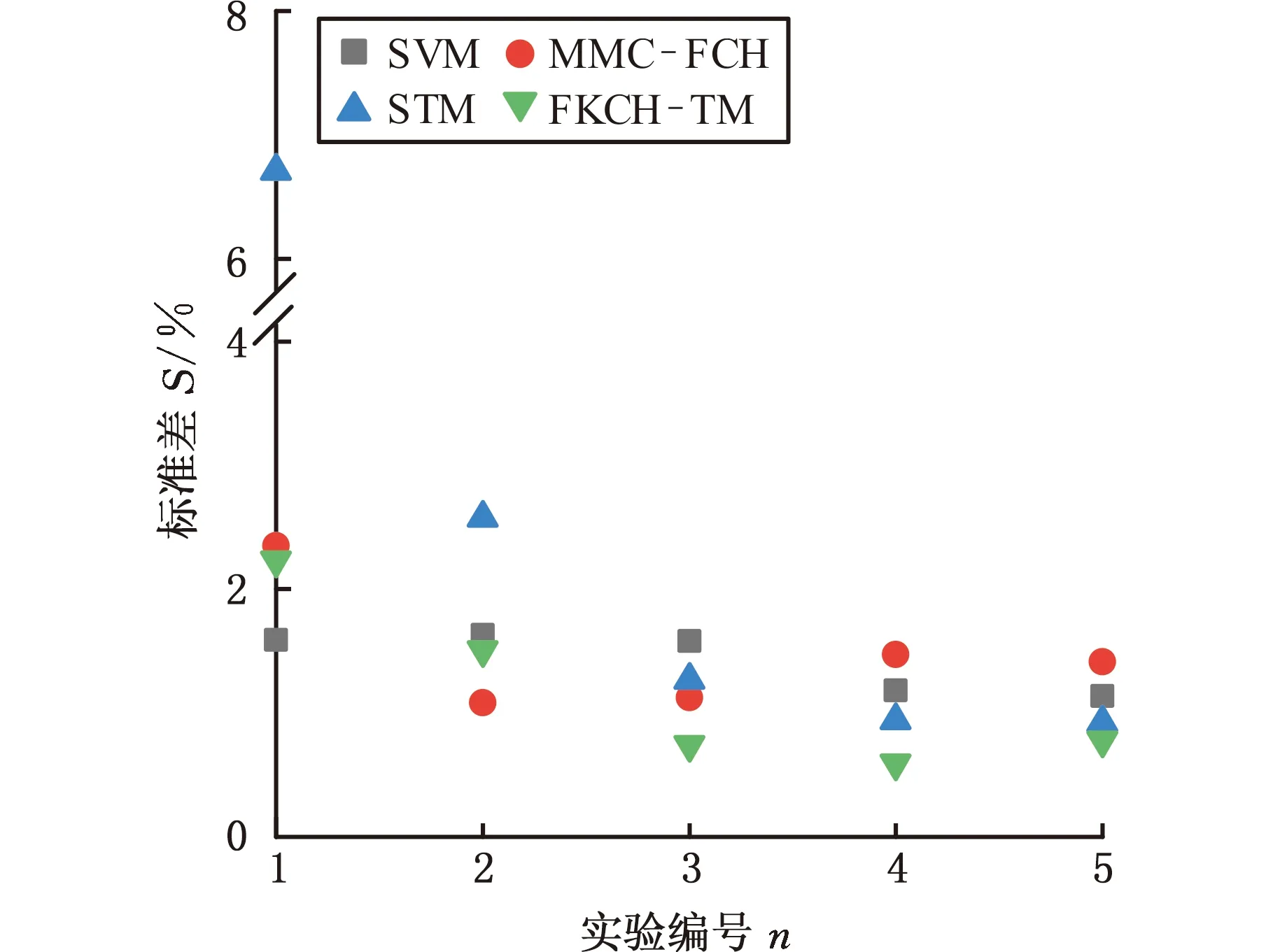
图6 不同方法诊断结果的标准差
为进一步验证FKCH-TM将热成像作为输入进行诊断的优越性,选取振动信号进行诊断对比,借鉴文献[15]中的对比方式,首先对原始信号作小波时频图,并以小波时频图作为FKCH-TM的张量特征。FKCH-TM以振动信号和热成像进行诊断的10次平均诊断结果如表3所示。
由表3可以看出,训练样本较少即实验1和实验2时,热成像作为FKCH-TM的输入比以振动信号为输入取得的诊断结果有明显优势,随着训练样本的增多,诊断精度差异减小,但是总体上以热成像为输入的精度都要高于以振动信号为输入的结果。
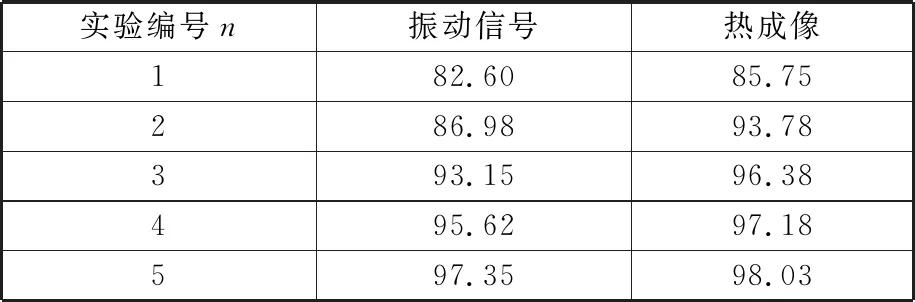
表3 FKCH-TM方法在不同信号输入时的平均诊断结果
4 结论
本文构建了FKCH-TM模型,以机械装备不同故障工况下的热成像为目标信号,提出了基于FKCH-TM的机械设备热成像故障诊断方法。本文方法与已有方法的故障模拟实验结果表明,本文方法以热成像图像作为输入,可以准确识别机械设备不同的故障,而且诊断结果优于对比方法。此外,每组实验多次随机抽样诊断的结果表明所提方法在机械设备智能故障诊断中的稳定性。
然而,基于温度的热成像存在时间延迟,上述的实验都是在设备运转稳定即温度上升到趋于稳定后采集信号,所以该方法目前还不能做到对突发故障的检测。因此,基于热成像的故障诊断需要从实验方案和理论上进一步研究。