矿区6kV~110kV架空输电线 绝缘包覆作业机器人运动控制研究
2021-06-29赵永清
赵永清

摘 要:矿区输电线路是电网设备的重要组成部分,其生产运行的安全性与可靠性会对整个电网安全与稳定运行产生直接影响,特别是对于矿区架空输电线路而言,其导线表面与绞线缝隙之间容易出现污垢杂物的积聚,导致意外跳闸等事故发生,为提高安全性,必须进行矿区架空输电线路的绝缘改造。文章基于对矿区6kV~110kV架空输电线线路结构的分析,设计绝缘包覆作业机器人方案,并对其运动控制系统进行详细研究,实验结果表明,该机器人可以3m/min的速度进行绝缘包覆作业,绝缘涂料可均匀包覆导线,无露点与流挂现象,可为矿区6kV~110kV架空输电线路绝缘化提供可参考的解决方案。
关键词:架空输电线;绝缘包覆;机器人;运动控制系统
中图分类号:TM726.3;TP242.3 文献标识码:A 文章编号:1001-5922(2021)05-0093-04
Research on Motion Control of Insulation Coating Robot for 6kV~110kV Overhead Transmission Line in Mining Area
Zhao Yongqing
(Power Supply Center of Shendong Coal Branch, China Shenhua Energy Co., Ltd., Shenmu 719315, China)
Abstract:Orefield power transmission line is an important constituent part of power grid equipment, its security and reliability of production run can make a direct influence on the power grid safe and sTab operation. Especially for orefield overhead transmission line, dirt sundry can gather between wire surface and stranded wire slot easily, it will make accidental tripping happened. In order to enhance security, it is necessary to make an insulation transformation for orefield overhead transmission line. On the basis of orefield 6kV~110kV overhead transmission line structure analysis, the paper designs insulation covering operation robot scheme, and researches its motion control system detailedly. The test results show that robot can do insulation coating operation with 3m/min speed, and the insulating paint can cladding the wire equably, there is no dew point and sagging phenomenon, it can provide reference solution for orefield 6kV~110kV overhead transmission line insulation.
Key words:overhead transmission line ; insulation coating ; robot ; motion control system
電力系统通常包括发电厂、输电线路、变电站、配电设备与用户5个部分[1],其中,输电线路是其重要组成内容,在我国各地均有分布,源源不断地将电能向工厂、矿山、城乡输送。基于输电线路的支持,电能才可到达各级变电站与负荷中心,并逐步向家用电器、电机等输送。对于国民经济发展与城乡人民生活而言,输电线路的安全稳定十分重要。
随着配电网的迅速发展,矿区配电规模也不断扩大,但其输电线路路径复杂、运行环境恶劣,长期在野外暴露,容易遭受碰线等外力破坏与雷击等自然破坏,导致供电中断,对电网的安全可靠运行产生负面影响。实施架空导线绝缘化,能解决裸导线腐蚀速度快、使用年限短、抵御外破能力弱等问题,亦能减少线路维护支出,达到减人增效、提高线路安全经济运行水平的目的。现阶段,矿区架空输电线路绝缘化改造方式通常为将绝缘导线更换,这既要求进行新杆塔的架设,又需较长的停电时间,不仅工程量大,投资成本高,施工也不方便。采用喷涂的方式为架空裸导线包覆绝缘涂料,省时、省力且省钱,技术途径可行。架空输电线绝缘包覆作业机器人项目是将裸线形式的架空线路作为对象,将架空输电线自动绝缘包覆作为目标,基于当前研究所做的线路绝缘包覆工艺优化,属于采用喷涂形式包覆绝缘涂料的一种技术创新。文章以矿区6kV~110kV架空输电线为对象,对线路上绝缘包覆作业机器人的设计及其运动控制展开研究。
1 矿区6kV~110kV架空输电线线路结构
绝缘包覆机器人的工作目标与任务明确,即对输电线进行完全绝缘的油漆作业[2]。矿区6kV~110kV架空输电线线路的原材料、工艺技术、超结构化对象、电线与配件、外形尺寸以及安装位置等均有严格的统一标准,其绝缘包覆作业须在矿区的自然环境下完成,必须对矿区的地理位置以及气候等长短期因素进行综合把握,这使其面临很多复杂性与不确定性。所以,绝缘包覆作业机器人的设计需考虑矿区6kV~110kV架空输电线线路的复杂环境。
发电机发出电能之后,变压器会将电压升高,之后,电能会经站内接断路器、刀闸等开关设备接入至输电网络,这一过程即电能的输送过程[3]。
以输电线的本征形式结构为划分依据,架空输电线有架空输电线路与电缆线路2种类型,前者包括杆塔、导线、绝缘子、线路金具、拉线、杆塔基础及接地装置等,在地面上架设,在输电网络中不可或缺;后者主要在地下进行电缆的敷设,通常含隧道、排管、拖管等形式。基于架设方便且迅速、维修便捷、成本小等优点,架空输电线路的应用更加广泛,但其缺点也不容忽视,如容易受到雷击等环境因素的影响、易出现故障、电磁干扰严重等[4]。而电缆线路虽然不会出现架空输电线路的故障,但其成本很高,当有故障出现时不便于维修,故我国矿区6kV~110kV输电网现仍以架空线路为主,电缆通常应用在不方便进行架空线路架设的一些区域。因此,文章将矿区6kV~110kV架空输电线路作为研究对象。
2 绝缘包覆作业机器人方案设计
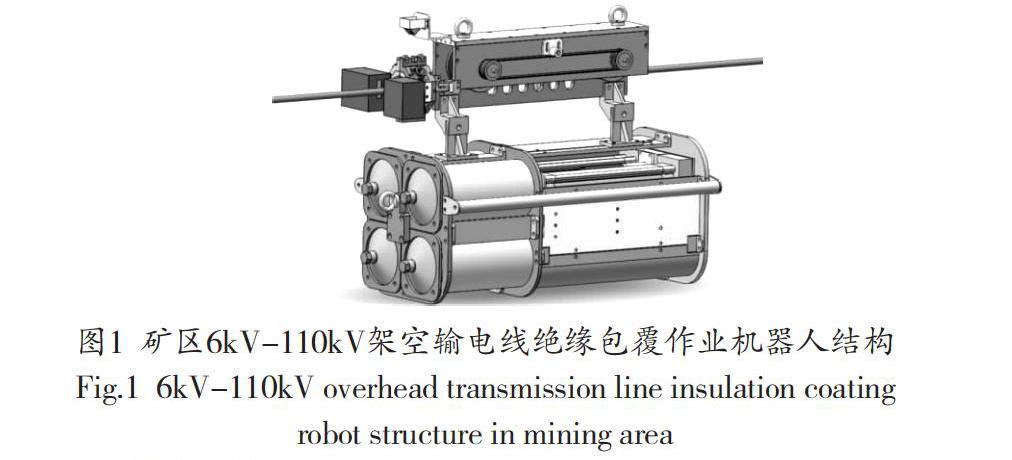
架空输电线绝缘包覆作业机器人是智能化设备,主要包括机器人行走机构、绝缘材料供应系统、动力电池、绝缘包覆机构与机器人运动控制系统等模块。绝缘包覆作业机器人在直接架设的架空输电裸导线上施工,在架空线缆上进行绝缘涂料的均匀包覆。此项作业能够将输电裸导线改造为绝缘导线,达到线路全部绝缘的目的,保证矿区6kV~110kV架空输电线电能传输的安全性。均匀包覆的绝缘材料专门为架空输电线的绝缘保护设计,能够在很短时间内施工并在正常的气候条件下快速固化,外观良好,绝缘、耐UV、机械耐磨、耐热与防水漆透过等性能优异。图1所示为架空输电线绝缘包覆作业机器人的整体结构示意。
2.1 行走机构
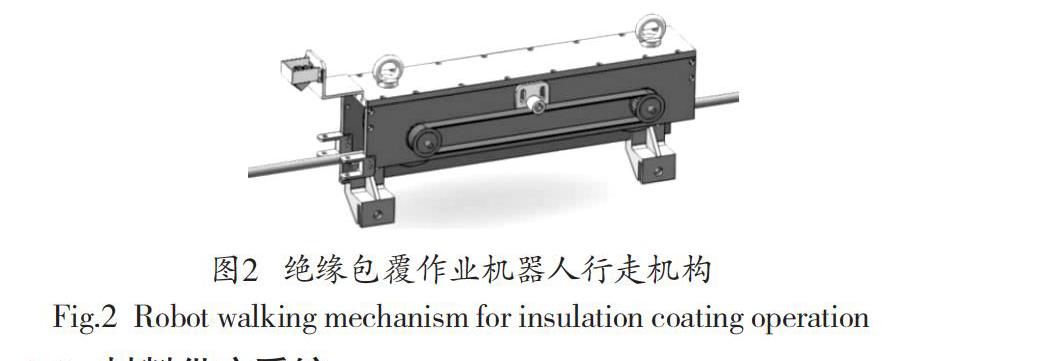
行走机构是绝缘包覆作业机器人的重要技术之一。是机器人沿着矿区6kV~110kV架空输电线行走的动力机构,包括直流无刷电机、橡胶滚轮、同步带轮与同步带。直流无刷电机对橡胶滚轮进行驱动,产生沿输电线行走的动力;橡胶滚轮之间用同步带轮与同步带链接起来。图2所示为机器人的行走机构示意。
2.2 材料供應系统
绝缘材料供应系统水平悬挂在机器人行走机构的正下方位置,主要包括独立的柱塞式涂料桶、直流伺服电机、电动推杆、导管、绝缘包覆头与涂料。柱塞式涂料桶是绝缘材料的载体,在材料供应系统的前端位置固定。在工作状态下,直流伺服电机会对电动推杆产生驱动作用,使其推动柱塞式涂料桶底部的活塞,进一步地,涂料在活塞的挤压之下由前端出口流出,沿着导管进入绝缘包覆头。图3所示为机器人材料供应系统示意。
2.3 动力电池
绝缘包覆作业机器人本体有很大重量,故其动力电池采用小电池定时更换的模式[5]。矿区环境复杂,线路垂弧不一,在自绝缘包覆作业环节多次更换电池很不便利,故采用在6kV~110kV架空输电线路上感应取电的模式。
采电线圈是架空输电线路感应取电电源装置的主要设备,功能在于将架空输电线路周围的电磁能转化为绝缘包覆作业机器人动力电池的电能。在感应取电时,将采电线圈套于架空输电线路上,利用电磁感应原理令架空输电线周围的电磁能转化为电能输出,输出的能量是交变电流形式的,可经桥式整流电路变为直流电,对绝缘包覆作业机器人供电。
2.4 绝缘包覆机构
绝缘包覆机构在输电线线缆上扣合,扣合结构采用对称结构,内侧中心同架空的输电线线缆相契合,将支撑与导向作用发挥出来。为了确保包覆的绝缘涂料有一定的厚度,需要在绝缘包覆头的出口与输电线揽之间设定相应的距离。在挂钩的连接作用下,绝缘包覆头实现同机器人行走机构的连接。图4所示为机器人绝缘包覆头示意。
2.5 运动控制系统
绝缘包覆作业机器人需应对矿区复杂且特殊的工作环境,具备自主控制与接受地面控制中心远程控制功能,保证在任何时刻均能安全与可靠工作。
绝缘包覆作业机器人沿架空输电线行走,其运动控制系统以双向信号传输为主导,机器人向地面基站发送线路规划、信号灯等数据;当遇到特殊情况导致机器人无法自行将困难克服时,地面基站人工调节发挥作用,对机器人进行远程操控。环境温度、湿度、强磁域以及矿区6kV~110kV架空输电线等均是运动控制系统设计需要考虑的因素。
3 绝缘包覆作业机器人运动控制系统设计
3.1 系统硬件
绝缘包覆作业机器人运动控制系统是双控制系统,分别设置STM32芯片与ARM芯片,其中,STM32芯片采用UCOS系统,主要功能为控制机器人运动、采集传感器数据、实现云台控制;ARM芯片采用Linux系统,在4G无线路由器的支持下同地面控制中心进行通信,实现对机器人的远程控制、信息采集、图片与视频传输等。为了避免机器人出现故障,STM32芯片与ARM芯片经串口通信,通信频率为0.1s。若STM32芯片有故障发生,ARM芯片可对其进行重启,而若ARM芯片有故障发生,STM32芯片同样能将ARM芯片重启,该方案可保证机器人作业的可靠性与稳定性。
机器人控制单元包括速度采集与控制、方向控制等。根据压力传感器采集到的压力值,机器人主控板可通过相关的算法对运行位置及速度进行自动调整,使机器人沿架空输电线平稳运行。传感器用于外部环境与机器人运动状态数据信息的采集,为机器人的状态调整及运动控制提供基础数据。此外,机器人本体还配有三轴高清维稳云台,能够将风、杆塔等的振动影响削弱,保证云台稳定性与图片、视频采集质量。
3.2 地面控制中心软件
绝缘包覆作业机器人地面控制中心软件通过无线串口同机器人建立通信,远程监督与控制机器人操作,并进行图片的采集,显示监控状态。一方面,工作人可以控制机器人,使其沿着架空输电线行走,并对线路走廊进行实时查看,借助图像传输模块,地面控制中心还可将高清云台采集到的输电线线路、机器人绝缘包覆作业照片与视频保存至手持终端,为作业人员查看与记录留存提供便利;另一方面,地面控制中心还可对各类传感器的工作状态、GPS定位坐标、电池电量等信息进行查看。
地面控制中心软件包括机器人远程操控、接收机器人作业状态信息、视频云台操作[8]3个功能模块(图5)。利用上位机,工作人员可远程操控绝缘包覆作业机器人,控制其前进、后退、启停等,同时,接收机器人作业状态信息,对无线串口接收到的命令进行读取,遵循通信协议规定解析所接受的命令参数,读取传感器工作状态以及GPS坐标、电量信息等,实时将相关参数显示于界面之上。
除此之外,地面控制中心软件还能够实时查看机器人所携带的云台摄像头采集并回传的照片与视频,并经相应的按钮设置控制高清云台。
4 试验验证
基于地面控制中心软件的控制,测试本文所设计的架空输电线绝缘包覆作业机器人工作性能。所用绝缘包覆材料为3M的526单组份绝缘涂料,零距离耐压大于6kV/mm,当与空气相遇时会发生固化反应,表面固化时间大约为30~40min,具备强度时间大约为4h;机器人前进速度为3m/min,运行情况平稳且稳定,绝缘涂料的挤出率大约为330mL/min,包覆作业之后,导线有比较均匀的包覆厚度,波动范围大致控制于2.5~3mm,没有露点与流挂现象出现。
5 结语
出于对现阶段矿区6kV~110kV架空输电线路绝缘改造客观需求的考虑,以对线路结构的把握为基础,进行绝缘包覆架空作业机器人的设计。通过地面控制中心软件的操控,对实际矿区6kV~110kV架空输电线路进行测试,所得结果显示,绝缘包覆作业机器人有相对平稳的行进速度与绝缘涂料挤出速率,机器人控制系统的可靠性较好,能够有效实现矿区6kV~110kV架空输电线路绝缘改造目标。
参考文献
[1]贾雷亮.采空区对电力输电线路的影响分析及其综合治理研究[D].北京:华北电力大学,2012.
[2]Micheal L, Rpger B, Andre V. De-icing EHV overhead transmission lines using electromagnetic forces generated by moderate short-circuit currents[A]. IEEE 9th International Conference on Transmission and Distribution Construction, Operation and Live-line Maintenance, Chicago,2000:39-100.
[3]Mark O. Electromechanical fuse for storm damage mitigation and outage reduction on distribution line customer service drops[A]. IEEE 10th International Conference on Transmission and Distribution Construction, Operation and Live-line Maintenance, Chicago, 2003:176-180.
[4]Tom B, Gutwin P. Application of BCTC standardized risk estimation model to assess rick due to ice stroms[A]. 8th International Conference on Pababilistic Methods Applied to Power Systems,2004:93-95.
[5]劉文博.架空裸导线绝缘化喷涂装置研究及应用[D].北京:华北电力大学,2014.
[6]陈文哲.高压输电线路监控设备感应取电装置的设计[J].宁夏电力,2015(2):46-50+64.
[7]孙茂文.全越障功能的架空输电线巡检机器人的研制[D]. 南昌:南昌大学,2017.
[8]彭道刚,关欣蕾,戚尔江.智能巡检机器人云台远程控制系统的设计[J].电气传动,2018,48(11):43-47.
