基于车车通信的CBTC系统*
2021-06-29黄苏苏冯浩楠
黄苏苏 冯浩楠
(1.中国铁道科学研究院集团有限公司通信信号研究所,100081,北京;2.国家铁路智能运输系统工程技术研究中心,100081,北京 ∥ 第一作者,助理研究员)
轨道交通系统需要使用先进的信号系统和通信方式来控制列车运行、保障行车安全、提高运输效率、节约能源并减少维护费用、改善员工劳动条件和用户体验。欧洲、北美的轨道交通信号系统与中国的轨道交通信号系统的发展过程相似,却又因为不同的国家情况、地理位置及实施目的而各有差异。
1 世界主流轨道交通信号系统介绍
1.1 欧洲铁路运输管理系统
ERTMS(欧洲铁路运输管理系统)是由欧盟制定的铁路信号管理和互操作标准体系,由GSM-R(全球移动通信-铁路)、ETCS(欧洲列车控制系统)、ETML(欧洲铁路运输管理层)组成。ETCS可以分为车载和轨旁两个子系统。其中,根据应用等级的不同,轨旁子系统由应答器、沿线的电子单元、GSM-R(全球移动通信-铁路)、RBC(无线闭塞中心)、欧标环线、无线接入单元、密钥管理中心(KMC)、公钥基础设施(PKI)组成。车载子系统由ETCS车载设备和GSM-R无线系统的车载部分组成。具体系统结构和通信协议见图1。
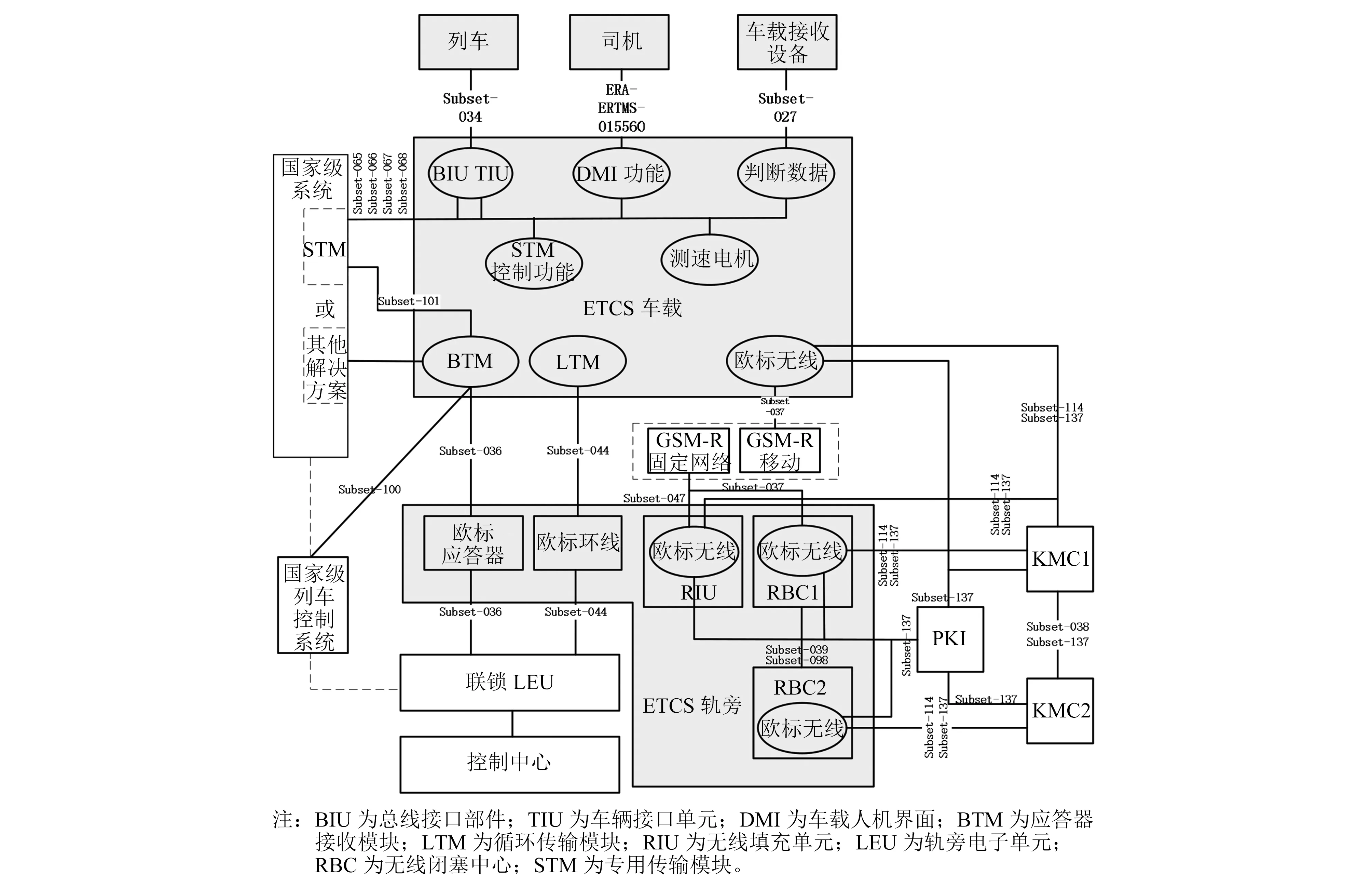
图1 ERTMS结构和通信协议示意图
ETCS运行等级是表达轨道和列车之间操作关系的一种方式,其定义与所使用的轨旁设备、车地通信方式、车载和轨旁设备分别处理的功能有关。
1) ETCS-0级:配备了ETCS的列车在未配备任何列车控制系统的线路上运行,或者在配备了ETCS轨旁系统或欧洲各国的国家级列车控制系统的线路上运行,但目前无法在它们的监督下进行操作。
2) ETCS-NTC级:配备了ETCS的列车在配备国家级列车控制系统的线路上运行。
3) ETCS-1级:配备了ETCS的列车在配备欧标应答器、欧标环线或无线电填充设备的线路上运行。
4) ETCS-2级:配备ETCS的列车由RBC控制,并在配备欧标应答器或欧标环线的线路上运行。其中列车位置和列车完整性证明由轨旁设备提供。
5) ETCS-3级:类似于ETCS-2级,但系统需根据车载收到的信息进行列车位置和列车完整性监督。
1.2 美国主动列车控制系统
美国国家运输安全委员会早在1971年就要求采用更先进的技术措施去防护铁路运输中的人因故障。1994年美国联邦铁路管理局在铁路通信和列车控制方面向国会提交了一份报告,提出了PTC(主动列车控制)系统,并于2004年向国会拨款委员会提交了一份关于PTC系统优势和成本的报告[3]。
基于美国铁路货运居多的特点,PTC 标准在制定之初,决定通过在既有传统信号系统上叠加车载列控来加强安全保障,并侧重考虑了低成本、兼容通用、无线通信、卫星定位、集中控制以及易于维护等原则。目前通过验证的美国PTC系统支持的列车最高运营速度为177 km/h。PTC系统的理念与世界主流列车运行控制系统相关标准不同,这些特征反映出美国铁路的运营需求及发展特点。该系统主要由卫星定位系统、轨旁信号设备、室内信号设备、控制中心调度系统组成。PTC系统基本的列车运行控制原理为:使用GPS计算列车到授权边界的距离;如果司机没有在限速范围内减速,PTC系统给出警告;如果司机没有在限速范围内刹车,PTC系统触发紧急制动。
美国铁路公司向联邦铁路管理局(FRA)提交的报告显示,截至2017年,全美68%的货运机车和50%的客运机车已经安装并运行了PTC系统[4]。大多数PTC系统是依靠轨旁的固定转发设备与GPS(全球定位系统)结合的方式来和列车进行单向信息通信,以满足PTC系统的基本要求。只有少数系统能够与计算机辅助调度系统进行实时双向通信。
1.3 城市轨道交通基于通信的列车控制系统
城市轨道交通CBTC(基于通信的列车控制)系统是基于列车和轨旁设备之间的双向连续通信和列车能被准确定位这两个基础发展而来的。CBTC系统能够在保持甚至提高安全性的同时改善追踪间隔。现代CBTC系统允许存在不同的自动化等级(GoA),如IEC 62290-1:2014[5]中定义和分类了5个级别的列车自动化等级,见图2。典型的CBTC架构通常包括车载ATP(列车自动保护)子系统、车载ATO(列车自动运行)子系统、区域控制系统、通讯系统、联锁系统、ATS(列车自动监控)系统等子系统。
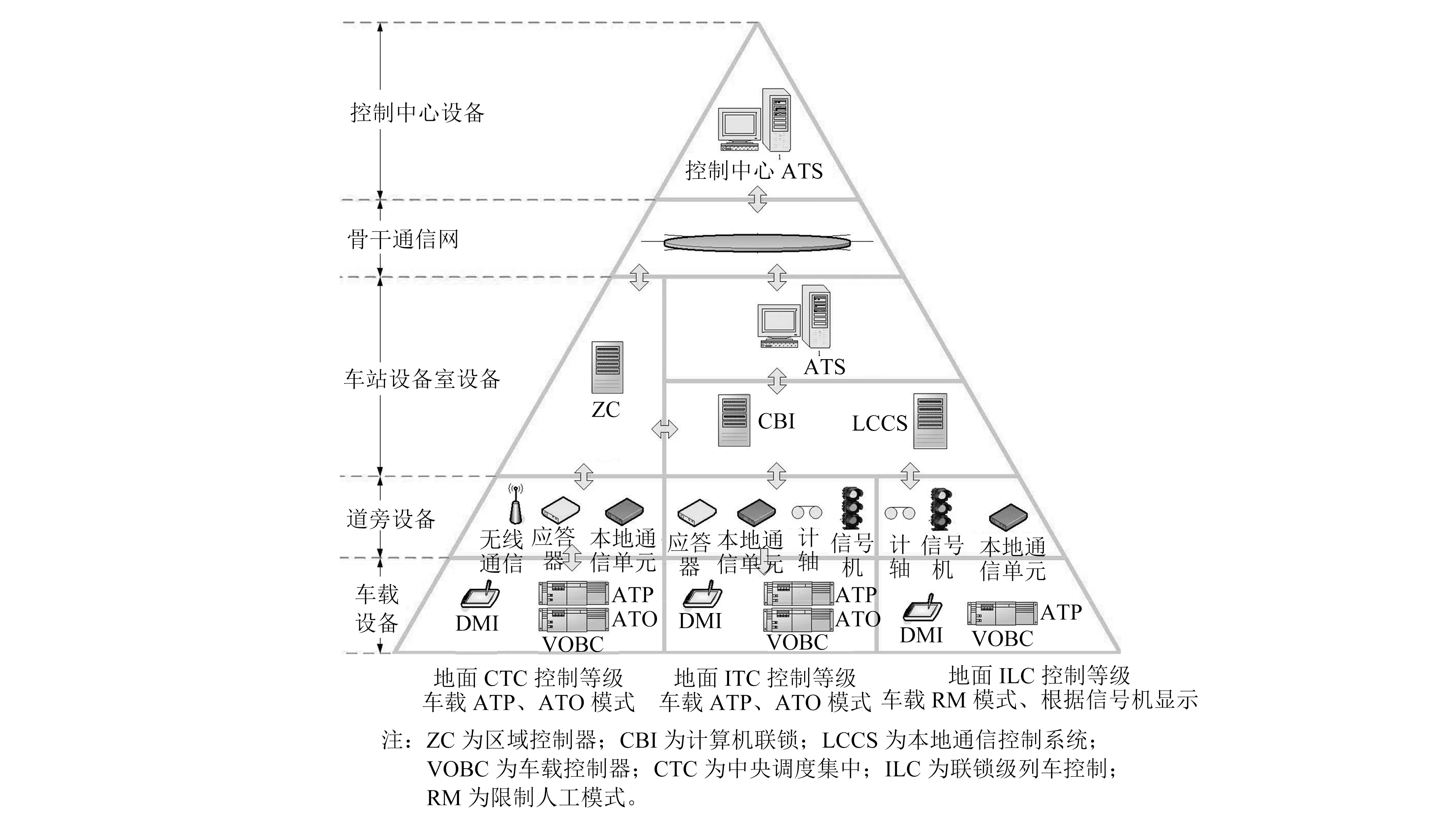
图2 CBTC系统总体示意图
目前,CBTC技术已经成功应用于各种实际项目中,包括部分采用短轨、运营车辆数量有限和运营模式较少的线路,如旧金山和华盛顿的机场APM(自动旅客捷运系统);同时还能覆盖日载客量超过100万人次,且拥有超过100列列车的复杂铁路网络,如马德里地铁1号线和6号线、深圳地铁3号线、巴黎地铁部分线路、纽约市地铁和北京地铁、伦敦地铁网络等。基于车车通信的CBTC系统更需要一个灵活的结构,既能应对稀疏线网,也能应对城市中心的繁忙线路。
2 基于车车通信CBTC系统的基本特征
由于各个国家的习惯、语言、地理位置等条件不同,铁路信号系统的需求在不同国家、不同城市都不尽相同,这使得铁路信号系统几乎已经成为一个定制系统,每条线路、每个项目都需要根据实际情况进行调整。随着现代城市的不断发展,预期下一代的铁路信号系统解决方案不仅需要降低成本,还需要为密集城市网络与其周边的郊区/干线网络之间的平滑连接提供有效的技术手段,并能够适应以下不同类型的铁路需求。
1) 城市轨道交通系统。该系统需要在完全独立的基础设施上运行,旅客密集且发车间隔短,具有非常高的性能要求。
2) 干线铁路系统。该系统连接各个城市的干线铁路系统。
3) 区域/市郊铁路系统。该系统是部分完全属于主线领域的区域轨道交通系统。
4) 市域铁路系统。
综合而言,能够在干线铁路和城市轨道交通中运行的基于车车通信的CBTC系统将能够提供完整的ATP、ATO、ATS功能,支持自动化等级由GOA0到GOA4的列车运行,显著减少生命周期成本,并以较低的成本实现性能的整体改善。同时,这种面向未来的信号系统解决方案还必须能够为不同的客户要求提供一定的可扩展性,且能够应对从低密度线路向高性能线路转变的情况。
3 基于车车通信的CBTC系统
IEEE 1474.1—2004[6]规定:“轨道上同一方向,前后跟随的列车必须以足够的距离分开,这是为了确保后行列车能够在到达前行列车的尾端位置之前,完成紧急制动。”图3 a)建立了相对位置的列车制动模型。该模型中,由于钢制车轮与钢轨之间的附着力限制了制动速度,故所需的列车追踪间隔随着速度的增加将急剧增加。通常在高速铁路上,两车的追踪间隔距离必须要达到数公里。从固定闭塞到移动闭塞的信号系统升级是为了达到在这种限制内最大化线路运行容量的目的,但面对不断增加的容量需求,原本的紧急制动原则目前正面临挑战[7]。
如果两列列车具有相似的制动速率,则列车可以更紧密地连接在一起。列车之间的通信链路可以确保若前行列车开始制动,则后行列车即执行相同的操作,并且在两列列车一同减速时保持分离,见图3 b)。该操作模式的先例是在道路交通中,车辆通常基于行驶间距运行,且驾驶员根据前方车辆的制动灯作出反应,而非依赖列车停止的完全制动距离。道路交通实现的安全水平比铁路的需求低,究其原因主要是由于对司机驾驶技术的依赖。伴随着铁路列车自动化等级的提高,以及全自动驾驶的推广,其安全性将得到保障。此类概念通常被其支持者称为“ERTMS4级”、“列车车队”或“虚拟连挂”,并在国家和国际研究议程中有所体现,如英国铁路技术战略和欧洲Shift2Rail 研究计划[8]。
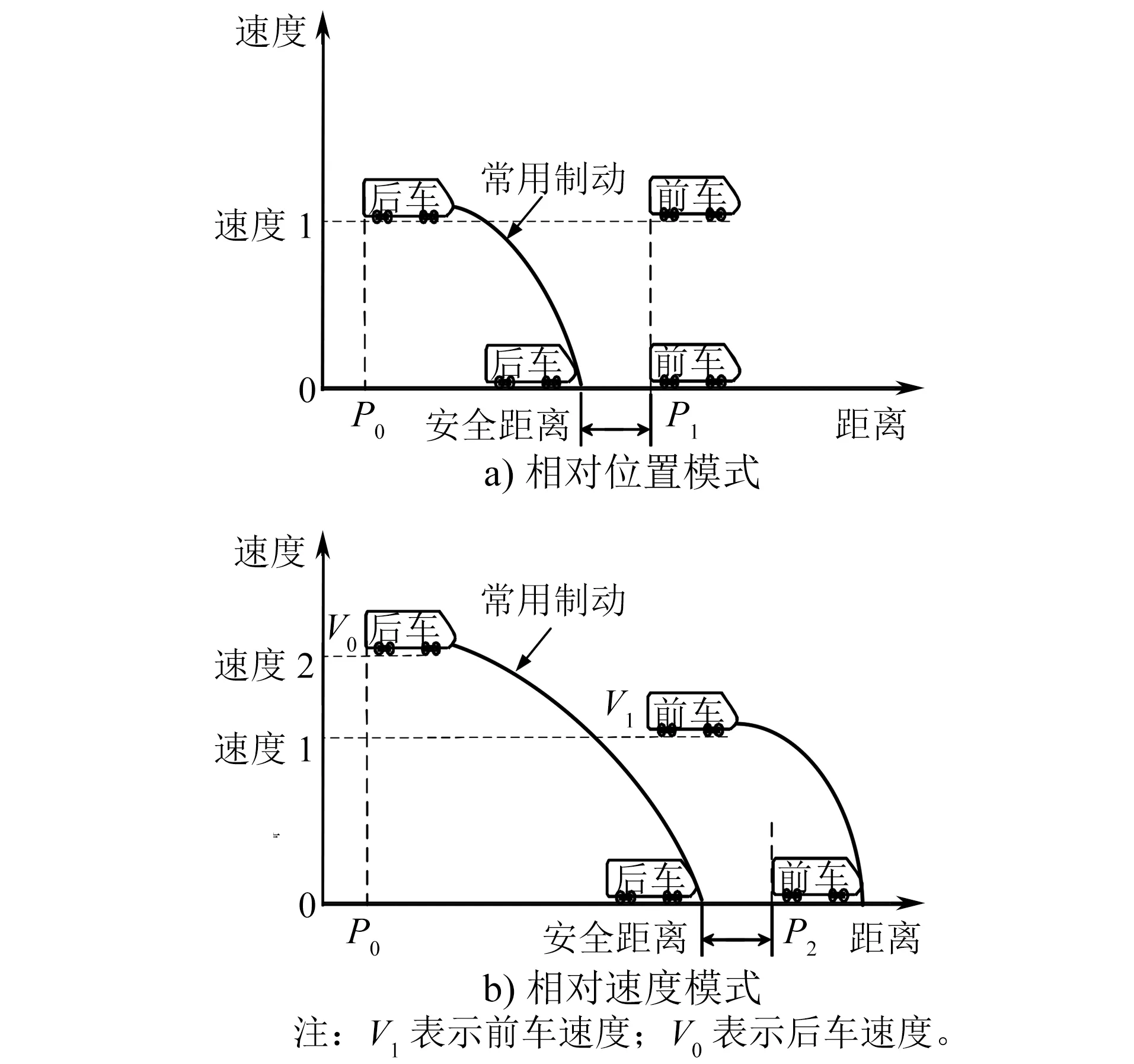
图3 相对位置和相对速度模式下的列车制动模型[8]
图4比较了以轨旁为中心的CBTC系统的控车信息交换方式和基于车车通信的CBTC系统的控车信息交换方式。以轨旁为中心的CBTC系统中,ATS将进路请求发送给联锁系统,同时将列车移动命令发送给区域控制器。联锁系统通过轨旁控制器操作转辙机、信号机及部分次级检测设备,并将进路办理完成并锁闭的状态发送给区域控制器,同时反馈给ATS。区域控制器根据联锁的进路状态和ATS的列车移动命令计算移动授权,并将其发送给车载设备并持续地管理列车位置。区域控制器将列车位置信息反馈给ATS,并将进路占用/不占用的状态命令反馈给联锁。这一系列过程中,整个CBTC系统需要一个周期来等待多个子系统的数据保持一致。该等待周期虽然可以不断优化,却始终影响整个CBTC系统的反应效率。
基于车车通信的CBTC系统无需同步轨旁联锁系统,其中ATS将列车移动命令直接发送给车载,车载控制轨旁的对象控制器占用/释放轨道资源、操作转辙机等,进路状态信息和列车状态信息则由车载直接反馈给ATS。该设计基于同质的“交通安全”设计原则,整个系统可以集中提高追踪间隔、操作灵活性,以及保障系统性能稳健,能够更快地响应未来多样化的列车运营场景。
与传统CBTC系统相比,基于车车通信的CBTC系统的核心概念如下:
1) 传统联锁的功能被重新分配到车载和轨旁的对象控制单元,列车可以直接占用、释放轨旁资源,自主排列进路;
2) 使用车车直接通信的方式获取列车状态信息,以及计算列车移动授权。列车能够自主定位并通过与区域内的其它列车直接通信,结合车载电子地图,自主计算本车的移动授权。
基于车车通信的 CBTC系统结构改变了传统由地面计算列车移动授权的方式,减少了轨旁设备,节约了成本,同时减少了相关子系统和子系统间的接口,优化了整个信号系统构架。优化后的以列车为中心的CBTC系统能够最大化地提高线路容量、实现运输灵活性并提高效率。
4 基本应用场景
基于车车通信的CBTC系统能够支持更多样化、更灵活的运营场景:列车自主操作进路,列车折返,虚拟连挂。
4.1 列车自主操作进路
列车接收到来自控制中心的目的任务信息,车载自主判断其所需的进路信息和相关进路资源。列车运行过程中经过道岔时,通过占用轨旁的对象控制器操作道岔并占用线路资源,从而实现自主操作进路,如图5所示。具体操作过程如下:
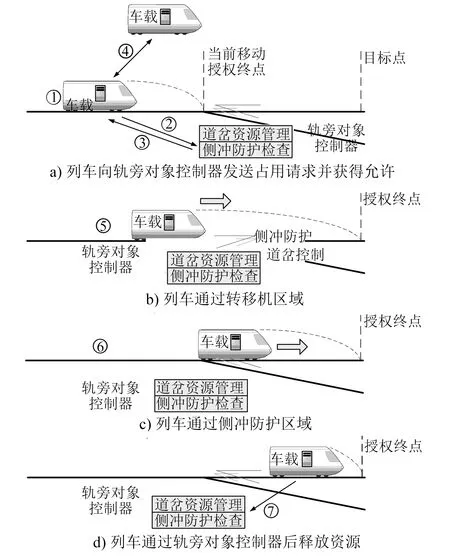
图5 列车自主通过道岔场景示意图
1)列车获得下一个运行任务信息,车载自主计算出到达目标点的进路及进路所需的轨道资源,此时列车的移动授权仅为前方道岔。
2)列车向进路所需的下一个道岔的对象控制器发送轨道资源占用请求,此时列车的移动授权仅为前方道岔。
3)轨旁的对象控制器控制转辙机动作后锁闭,同时锁闭该道岔的侧冲防护资源,完成后将占用信息发送给列车。对象控制器管理道岔的转辙机和侧冲防护,此时列车的移动授权仍然为前方道岔。
4)列车检查线路上相邻范围内列车的车车通信信息,对本车的移动授权进行安全校核,此时列车的移动授权仍然为前方道岔。
5)列车移动授权向前延伸,列车向前运行。
6)列车运行通过道岔。
7)列车运行到离开道岔的侧冲防护范围时,向该道岔的对象控制器发送释放资源的请求,对象控制器收到信息后释放转辙机和侧冲防护资源。
4.2 列车折返
列车折返一直是传统CBTC系统效率无法真正提高的瓶颈。无论正线列车追踪间隔多短(目前最小的正线列车追踪间隔时间能到达60 s),如果列车在折返时的效率无法提高,则所有列车都需要在折返轨处等待。目前最小的折返间隔时间一般约为3 min,在部分老旧线路,特别是折返时牵出线较长的线路,列车折返将需要更长的时间。
传统CBTC系统和基于车车通信的CBTC系统列车折返场景对比如图6所示。在基于车车通信的CBTC系统中,前行列车离开最后一个道岔的侧冲防护区域时,后行列车就可以开始运行。而传统CBTC系统则需要前行列车离开包含最后一个道岔的进路,后行列车才能运行。相比而言,基于车车通信的CBTC系统中后行列车可以更早地开始移动,转辙机也可以更早地开始动作,该系统在提高折返效率方面有更好的表现。同时由于该系统取消了传统的轨旁联锁系统,其反应时间会比传统CBTC系统更短,使得系统折返效率相应提高。
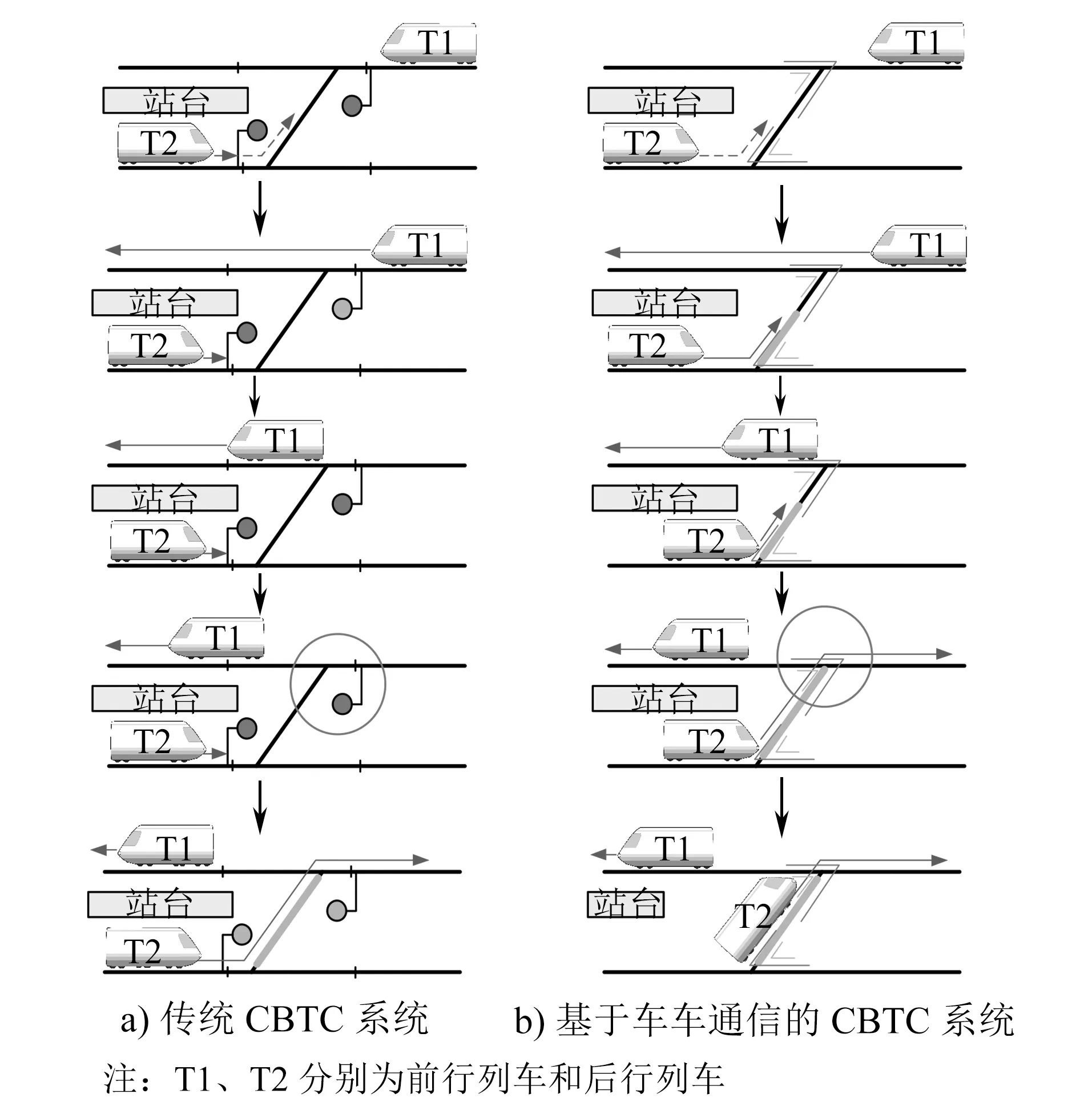
图6 传统CBTC系统和基于车车通信的CBTC系统列车折返场景对比
4.3 虚拟连挂
基于车车通信的CBTC系统中一个比较容易推广的方案是虚拟连挂。通过列车与列车之间的直接通信,使两列追踪列车形成一个虚拟连挂的小编组,从而优化和缩短列车追踪间隔。在列车小编组范围内,前行列车通过点对点的通信向后行列车报告它的位置、速度、移动授权等信息,且允许后行列车立即调整其速度。后行列车的ATO根据前行列车的运行状态信息,并结合本车的测速定位信息来控制后行列车,使其保持一个动态的安全距离去跟随前行列车运行。在这个虚拟连挂的小编组中,相邻两列列车之间能够通过自主定位和车车直接通信技术维持一个非常近的距离[9]。
此处的虚拟连挂小编组可以覆盖传统的 CBTC系统,但需要传统CBTC系统升级部分列车忽略信号。在未定义所谓的“跟随运行”是否达到虚拟连挂状态,或者列车之间的距离是否更大时,后行列车总是会停车等待。第1列列车称为“主车”,在公共进路的起始处通过道岔并发起跟随运行。后行列车进入被占用的区域并自行负责保持与前行列车的相对制动距离。
前行列车起动占用区段,后行列车起动释放区段。两列列车均知道其解挂的道岔位置以及周围的信号状态。在前行列车未出清道岔前,后行列车占用解挂道岔处的对象控制器并保持绝对紧急制动距离。在解挂之后,列车遵循传统CBTC系统规则运行,并跟随至运行结束。
5 结语
相比传统的CBTC系统,基于车车通信的CBTC系统能够精简轨旁设备、提高信号系统反应时间、提高列车运行效率、降低运营维护成本,并且能满足更多新的运营需求,在一定程度上可提高整个铁路行业的智能化水平。
实现基于车车通信的CBTC系统最关键的技术是列车与列车之间的直接通信,主流的技术研究主要集中在TETRA(泛欧集群无线电)、ITS-G5(智能交通系统-G5)、LTE(长期演进)版本等方向。此外,要完整地实现全部的系统功能,还需要列车的自动化等级达到GOA3 或GOA4。列车能够自主地完成完整性检查和精确定位,轨旁系统还要具备能够通过无线连接的智能控制单元的功能。目前基于车车通信的CBTC系统中部分技术还未真正进入实际应用阶段,世界各地的研究人员仍在不遗余力地为其努力。