基于BIM技术与定位技术的地铁施工人员安全预警
2021-06-29于用庆邹树琪张兴军
于用庆 邹树琪 张兴军
(1.厦门轨道交通集团有限公司,361010,厦门;2.上海城建信息科技有限公司,200120,上海 ∥ 第一作者,高级工程师)
1 地铁施工人员不安全行为分类
地铁施工事故与施工现场存在的地下空间有限、施工作业人员的不安全行为和复杂的施工环境密切相关。在地铁施工过程中所发生的事故,88%以上均是由于现场施工作业人员的不安全行为引起[1]。通过查阅相关文献和行业标准规范[2],地铁施工人员不安全行为主要包括违章作业、安全防护用品使用不正确、靠近危险区域等3大类。
1) 违章作业。违章作业是指一线作业人员未遵循相关规定要求的设备操作程序,在有或无意识的情景下未遵循符合规定要求的设备操作章程而进行作业行为。违章操作不安全行为主要包括:作业人员不正确操作作业、使用安全系数低的机械设备、不遵循规定要求流程操作机械设备、忽略安全提示、作业时注意力不集中、出现不符合要求的操作动作。
2) 安全防护用品使用不正确。安全防护用品使用不正确是指一线作业人员未准确穿戴安全防护设备,未正确使用个人安全防护用品。安全用品使用不当主要包括:不重视安全用品的佩戴、穿戴不安全的装束、使用不安全的防护装置。
3) 接近危险区域。接近危险因素是指由于施工现场比较混杂,危险源众多,作业人员工作时,在无意识或者因工作需要而不得不靠近危险源而进入危险区域。接近危险区域主要包括:私自进入不安全区域、攀坐禁止的不安全范围、在不安全的地方施工作业。
国内外众多专家学者结合BIM(建筑信息模型)数据孪生和定位技术在优化施工现场人员安全行为管控上进行了一定深度的研究。文献[3]利用BIM技术、AR(增强现实)技术、定位技术构建了BIM三维可视化人员安全管控框架系统,很大程度上实现了对施工现场作业人员所处安全场景的有效识别;文献[4]通过集成BIM技术和RFID(射频识别)技术创建了建筑工程施工现场人员安全监管系统,并利用C#语言,自主开发了基于BIM技术与RFID技术集成的建筑工程施工人员安全管控系统,并建立了事故应急预警模型;文献[5]利用BIM、AR等虚拟现实技术,结合智能携带装备,针对地铁工程施工过程中作业人员的安全行为进行分析研究,建立了BIM技术的信息化安全管理体系;文献[6]分析了集成ZigBee(紫蜂协议)和 BIM技术的施工人员安全管控预报警系统,提出了利用ZigBee技术实现现场施工人员的定位,分析施工中的不安全因素,以人、材、机为切入点,结合施工现场可能发生的环境场所和施工部位,构建施工安全预警体系;文献[7]融合 Cloud-BIM、UWB(超宽带)和ZigBee定位等技术方法,在人员实时定位、危险源和危险区域识别与分析的基础上,完成信息协同、实时定位、危险预警和路径规划的系统架构,有效降低了施工现场不安全现象发生的频率;文献[8]研究了GPS(全球定位系统)技术在施工领域的应用现状,提出了GPS目前主要集中在变形监测、放样、勘测测绘等工作中。
虽然较多的专家学者对BIM、AR、定位等技术在工程施工现场的人员安全管理进行了一定的分析研究,但在解决地铁施工现场人员不安全行为定位技术的运用上仍存在较大的不足。
2 定位技术的选择及其与BIM的集成机理
2.1 定位技术的选择
目前,较为成熟的定位技术主要包括:无线非射频技术、GPS技术、RFID技术、WSN(无线传感器网络)技术和UWB技术,且不同的行业和领域对其有着不同的定位需求。例如,在航海航空等领域主要利用卫星来对目标进行定位,应用较多的则是GPS室外定位技术。各定位技术比较见表1。
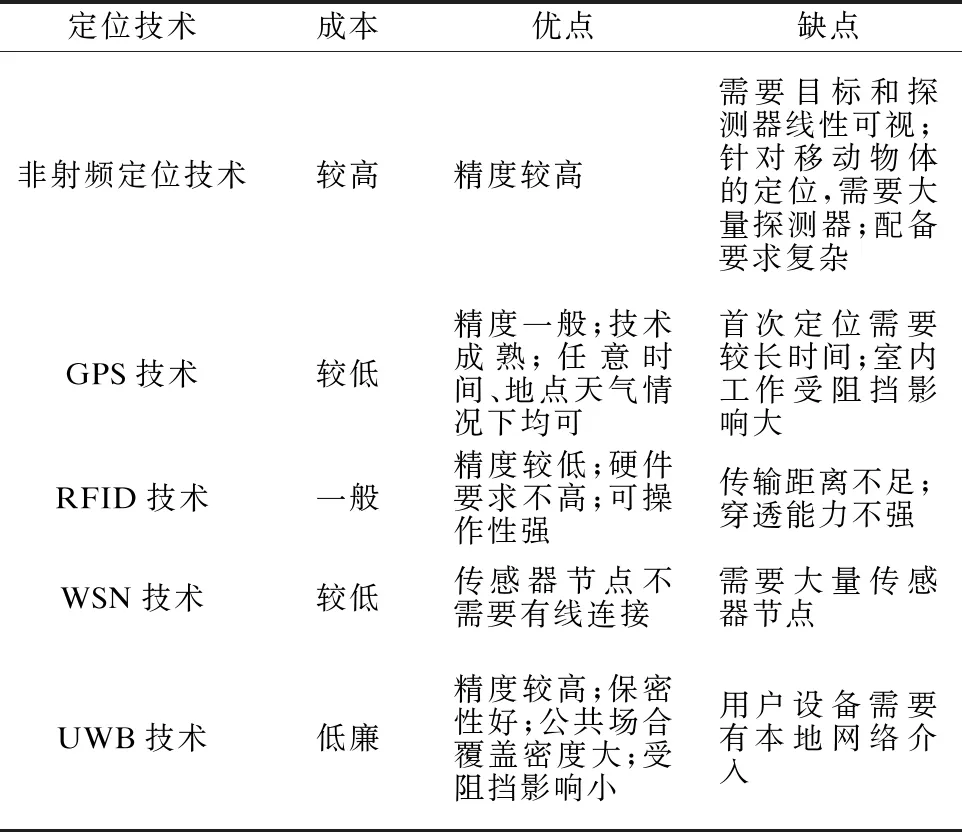
表1 各定位技术特点比较
基于地铁施工现场人员不安全行为管控的实际需要,确定采用GPS和UWB两种定位技术结合的方式。GPS技术实现对地面施工作业区域的作业人员的定位,UWB技术则实现对地下有限空间下作业人员的定位。人员携带的定位标签集成GPS和UWB定位模块,定位方式根据定位对象所处位置自动切换,从而实现施工现场作业人员的实时定位。
2.2 定位技术与BIM技术的集成机理
定位技术与BIM技术的集成依据工作流分为:模型建立、实时定位、计算、输出。
1) 模型建立。地铁工程三维模型主要包括场地、地下结构、施工机械、临时设施等。利用Autodesk Revit软件进行建模,同时利用集成平台,识别和共享.rvt格式的模型文件。
2) 实时定位。GPS和UWB 定位子系统获取和解析GPS数据和UWB定位数据,并将定位对象的坐标位置数据传输至集成平台。坐标位置数据通过与BIM进行整合,为计算过程的分析提供数据基础。
3) 计算。依据设计的安全性计算规则,将施工现场划分为不同预警条件的危险区域,同时对定位对象所处环境的安全性进行实时计算和判断。
4) 输出。将上一步计算分析得到的安全评估结果发送至携带有集成化定位标签的定位对象,同时发送安全识别数据,当计算得出的是不安全对象,则将依据预先设计的报警模式发送预报警提示。
3 施工人员不安全行为管控信息分析
要实现对施工现场作业人员不安全行为的实时监控和预警,应满足3大类数据需求:作业人员实时位置数据、作业人员属性及装备数据、作业人员危险动作数据。
3.1 作业人员实时位置数据
基于GPS、UWB定位技术对地铁工程施工现场作业人员和复杂机械设备的位置信息进行收集,并在BIM中经过设定的运算处理,实时进行位置安全性识别判断。
1) 地铁工程施工现场作业人员进出场及行走路径判断。基于地铁工程施工现场作业人员的位置数据,利用计算模块对其进行分析,以此获得作业人员实时的位置坐标,取得作业人员进出工地的时间数据,以此得出所有作业人员的考勤数据。利用作业人员任意时间内动态、实时的位置坐标数据,虚拟出某时间段内作业人员的运动轨迹,从而判断识别作业人员在施工现场的工作路径等。
2) 工人不安全位置判定及预警。基于作业人员的实时位置坐标数据,可实时评估作业人员的位置是否在安全区域内,并做出实时预报警提示。
3.2 作业人员属性及装备数据
作业人员的属性数据是指现场作业人员所属工种及工作职责权限等数据信息。作业人员的装备数据则是指作业人员在作业过程中,所穿戴的安全防护装备和施工工具等数据。通过作业人员属性和装备数据,可实时了解现场作业人员的属性信息,识别判断该作业人员安全防护装备穿戴是否完整,并判断作业人员在使用作业工具时是否满足规定要求。该类信息可写入集成化定位标签中,故而在作业人员的安全防护设备和工具上也可写入并安装携带该类信息的标签。
通过搜集施工作业人员的上述数据信息,并在计算模块里对其安全性、合理性和规范性进行实时判断识别,以此实现以下功能:
1) 安全装备佩戴识别。利用现场安装的UWB定位基站以及GPS模块,通过自动、实时、动态采集作业人员携带的集成化标签,可识别判断现场作业人员的属性,从而输出该作业人员的施工权限,并将其属性数据进行对比,判断工人是否按要求穿戴安全防护装备。
2) 机械操作权限识别。机械设备可写入其操作属性数据。当作业人员操作该机械设备时,UWB定位基站将自动识别和判断机械设备属性和人员属性数据等信息。通过该功能不仅能实时判断机械设备情况,同时亦能识别和判断操作人员是否具备机械设备的操作权限。
3.3 作业人员危险动作数据
作业人员的行为动作数据信息是指作业人员在施工现场活动时,所发生的动作和行为的数据信息。该数据信息包括可能产生事故的危险行为,作业人员在作业和操作等工作时不遵守或不完全遵守规定的操作流程和规章制度等。目前尚未有较完善的技术方式可以实时监管施工作业人员的危险动作和行为。
4 基于BIM技术和定位技术的地铁施工事故预警系统
基于BIM技术和定位技术的地铁施工事故预警系统(以下简为“地铁施工事故预警系统”)框架如图1所示。
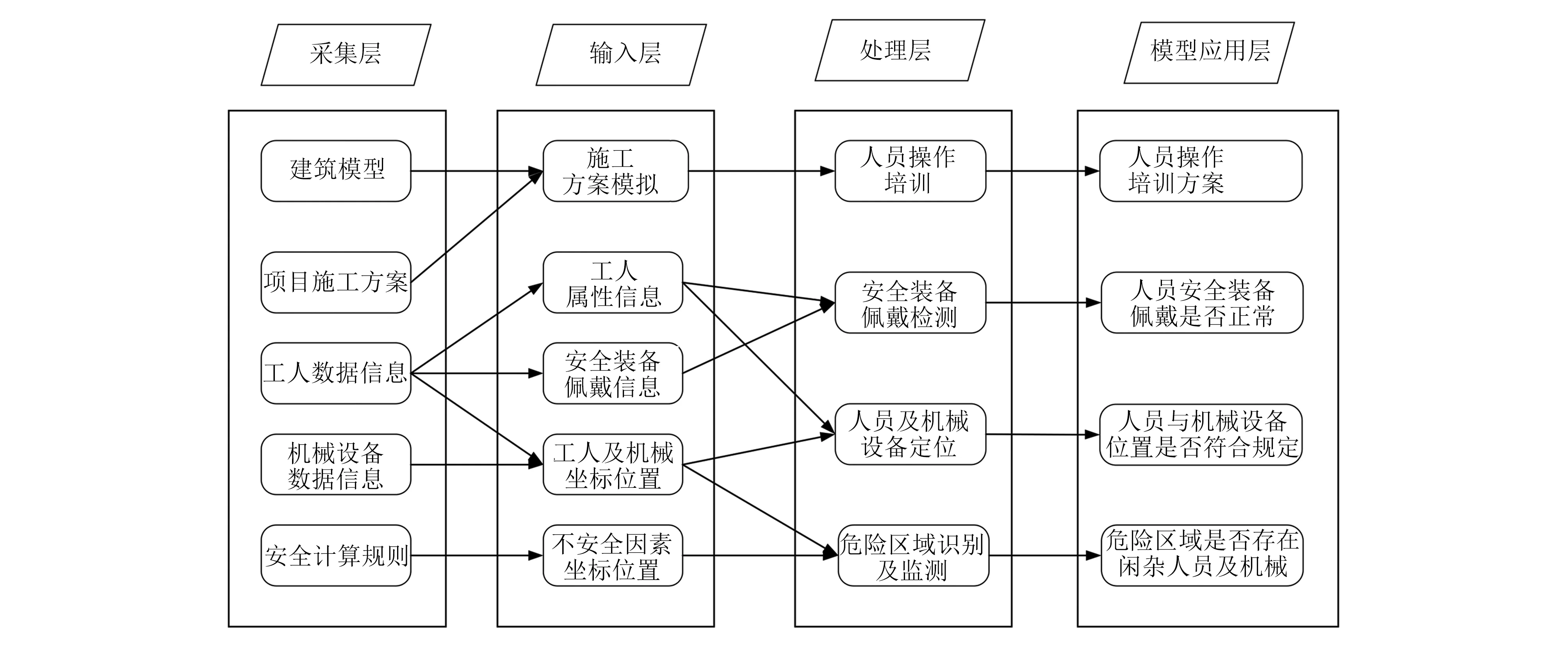
图1 地铁施工事故预警系统框架
1) 采集层。采集层即现场的感知层,通过利用UWB定位基站和GPS,实现对地铁工程现场人员及设备实时动态位置数据的采集。利用GPS和UWB的定位模块一方面可将现场周边环境数据精确化,另一方面通过现场安装的UWB定位基站或GPS模块可实现对现场作业人员的不安全行为监控。
2) 数据输入层。数据输入层可处理分析采集层数据,并向后续处理层发送分析后的数据。依据上述作业人员和机械设备的属性数据等信息,通过数据分析、逻辑运算和数据处理,可以获取作业人员的属性、位置及安全防护装备的佩戴情况等信息。
3) 数据处理层。数据处理层可对上一步输入层初步分析过的数据信息进行深层次的安全性逻辑判断分析。依据上述作业人员的属性和防护装备的信息数据,分析识别作业人员安全防护装备是否符合规范要求,不同职责的作业人员安全防护装备类型及佩戴要求会有不同。通过分析作业人员和机械设备坐标位置信息等数据,将作业人员和机械设备在BIM三维场景下的坐标位置进行展示。
4) 模型应用层。模型应用层是该框架系统的核心层。该核心层所产生信息数据的主要服务对象包括:①施工现场作业人员,其安全性需依据处理层的计算结果进行识别和判断:②施工安全管理人员。
模型应用层产生的数据通过现场基站等组建的网络进行传输,现场作业人员及安全管理人员利用随身携带的集成化标签接受反馈信号,通常反馈信号会以视觉或听觉以及震感的方式实现。具体工作模式如图2所示。
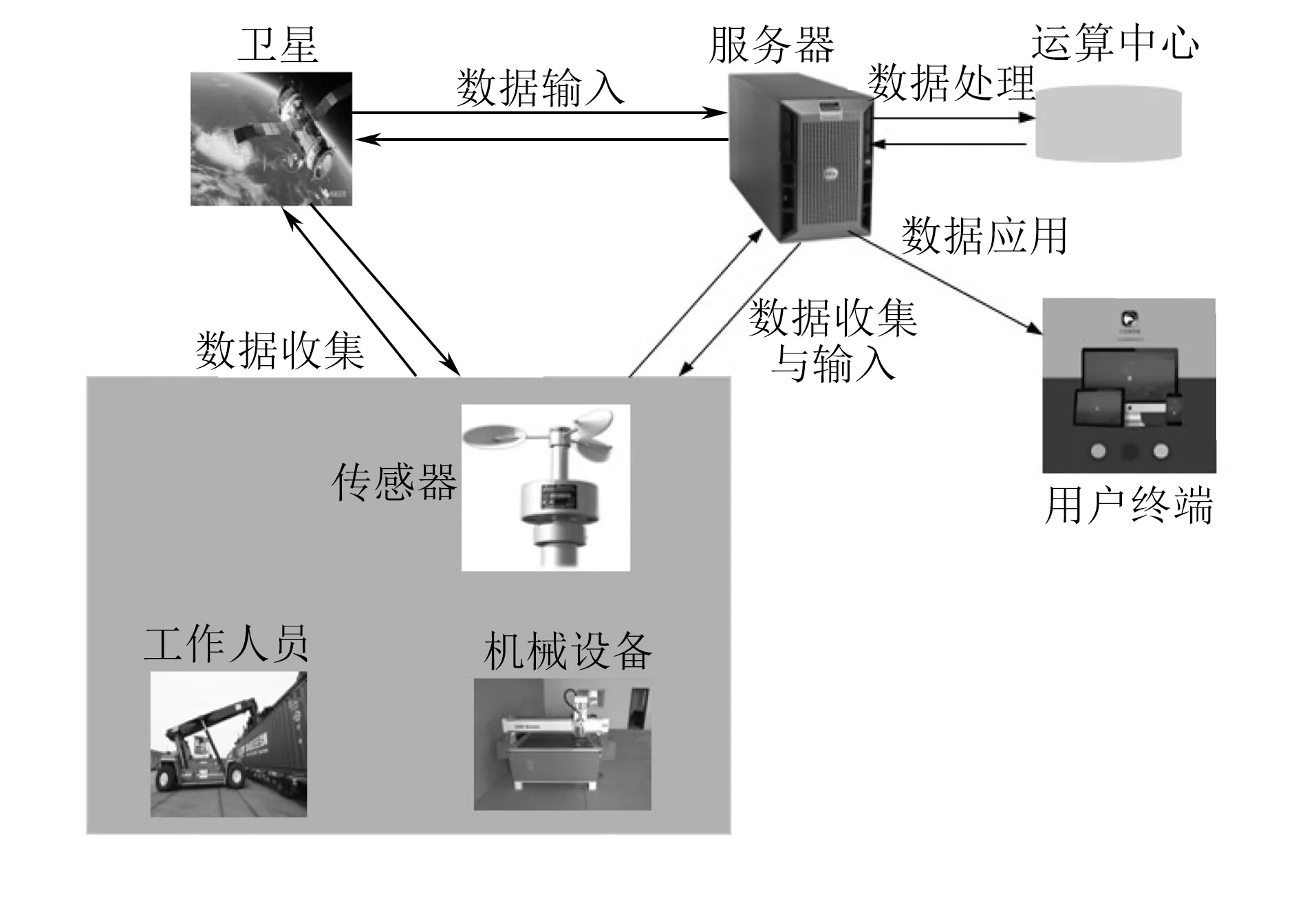
图2 地铁施工事故预警系统的工作模式
地铁施工事故预警系统利用GPS实现对地面施工区域的定位,然后该系统采集施工现场的数据信息,并对其进行判断、分析、处理、输出等操作。数据信息在服务器、数据库以及作业人员携带的集成化标签之间传输,从而对作业人员的安全性进行计算和识别。
综上所述,地铁施工事故预警系统可对不同性质的作业人员及其所处的不安全区域实现诸多功能,如作业人员坐标位置的实时监测展示、作业人员安全防护装备的佩戴监测、重要施工机械设备操作权限的监测等。在此基础上,根据工作人员的位置,该系统可以控制不安全区域中出现非本区域的工作人员,以及可将该区域中可能发生的危险事故实时提示给区域内的工作人员,从而有效地避免各种安全事故的发生。地铁施工事故预警系统的工作流程,如图3所示。
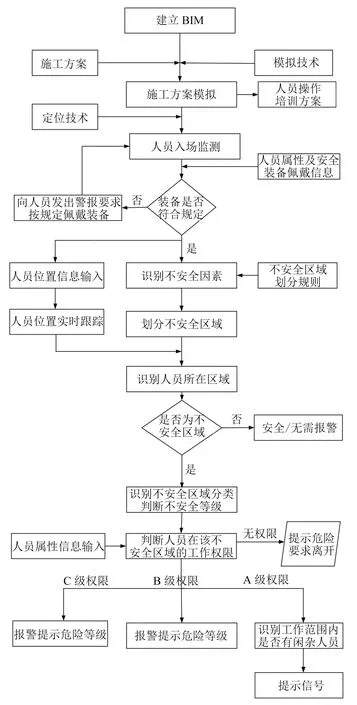
图3 地铁施工事故预警系统的工作流程
5 结语
本文通过集成BIM技术、GPS技术和UWB定位技术,为地铁工程施工人员不安全行为管控提供了一个新的、强有力的技术监管手段。构建了地铁施工事故预警系统,并提出了该系统的 4大基本功能,同时对各模块层的工作机制进行了详细分析。研究成果可为地铁工程现场施工人员不安全行为预警,以及后续相关系统的开发提供参考。