潘得罗扣件的弹条状态识别算法*
2021-06-29朱澎程苏圣超陈兴杰李立明
朱澎程 苏圣超 陈兴杰 李立明
(上海工程技术大学城市轨道交通学院,201620,上海 ∥ 第一作者,硕士研究生)
钢轨扣件是轨道上用于固定钢轨的连接零件,钢轨扣件的工作状态对列车安全运行极其重要。近年来随着机器视觉检测技术的不断发展,国内外研究人员针对钢轨扣件状态的识别展开了大量研究。文献[1]将主元分析法应用于扣件螺母缺失检测,并依据全局特征向量距离完成扣件状态的识别。文献[2]依据钢轨扣件区域的HOG(方向梯度直方图)特征,实现扣件状态识别。文献[3]采用方向场法,使用模板进行匹配,从而实现扣件状态识别。文献[4]利用Harr-like特征对钢轨扣件进行状态识别。文献[5]使用LBP(局部二值模式)算法对钢轨扣件图像处理后,将LBP直方图作为SVM(支持向量机)的输入,利用训练完成的SVM进行扣件状态识别。上述算法都是通过检测螺栓的缺失或者弹条的缺失、断裂来完成扣件状态识别。
潘得罗扣件是英国潘得罗公司生产的一种无螺栓式钢轨扣件。工人在采用潘得罗扣件的线路上巡检时,无需像有螺栓式扣件那样反复检查扭矩和拧松拧紧,因此,大大提高了线路维护效率和质量,同时降低了巡检成本。由于潘得罗扣件的弹条采用开关式结构,其状态需要根据弹条的弹出距离来进行判断,故上述文献中的扣件状态识别方法并不能直接适用于潘得罗扣件的状态识别。
本文提出了一种融合弹条纹理特征与形状特征的潘得罗扣件状态识别算法。该算法使用灰度-梯度共生矩阵与几何参数算法,分别提取钢轨扣件的弹条纹理特征与形状特征,再将两种特征组合成复特征向量后将其放入SVM分类器中训练,最后利用训练好的SVM分类器识别钢轨扣件的状态。该算法的具体流程如图1所示。
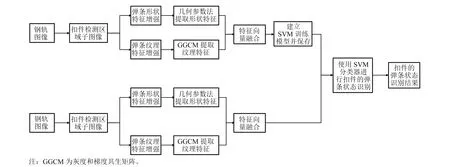
图1 融合弹条纹理特征与形状特征的潘得罗扣件弹条状态识别算法流程图
1 钢轨扣件检测区域的划分
潘得罗扣件是一种开关式扣件,弹条的弹出距离能够反映其所处的工作状态。图2中,钢轨扣件的工作状态是由弹条的弹出距离决定的。因此,根据人工巡检的经验值,将钢轨扣件进行区域划分,则可将扣件的状态离散化。若弹条在不同的区域出现,则钢轨扣件处于相应的工作状态。图3为检测区域划分图。
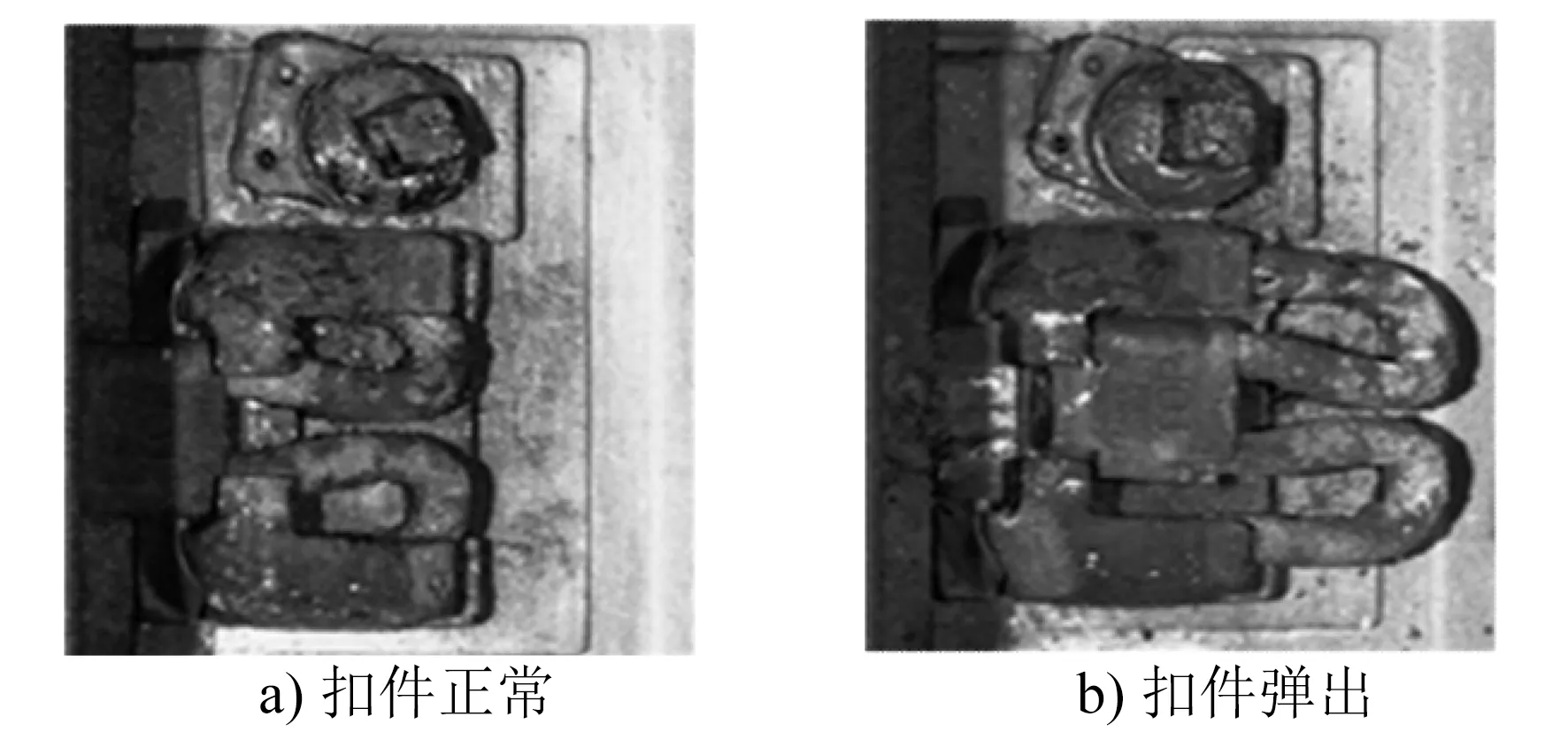
图2 钢轨扣件的状态
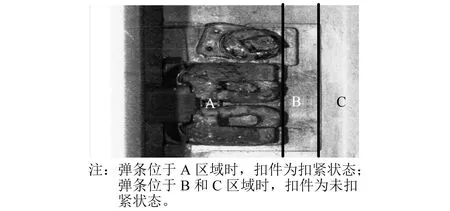
图3 钢轨扣件检测区域划分图
2 钢轨扣件的弹条纹理特征提取
纹理反映的是像元亮度(DN)值的空间变化特征, 即图像某个区域内具有规律性排列的灰度分布。图像纹理信息是由图像高频信息的空间分布所影响的[6]。由图2可见,图像对比度低、纹理模糊,且扣件与背景的区分度小。因此,需要增强图像的高频信息,提升高频分量在总体分布中的占比,即增强钢轨扣件弹条纹理的清晰度,提升钢轨扣件弹条与背景的对比度,突出钢轨扣件弹条的纹理特征,为进一步对钢轨扣件的弹条纹理进行分析奠定基础。
2.1 自适应对比度增强算法
自适应对比度增强(ACE)算法的主要技术手段是反锐化掩模技术[7]。该算法的具体实现步骤如下:首先利用低通滤波器获得扣件的弹条图像反锐化掩模,接着将原图与反锐化掩模相减获得扣件弹条图像的高频部分,然后把被放大高频部分与反锐化掩模相加,最终获得增强了高频信息与纹理细节的扣件的弹条图像。
定义f(i,j)为增强后的图像,x(i,j)为原始图像,mx(i,j)为反锐化掩模,C为常数且C>1。则ACE算法可表示为:

(1)
f(i,j)=mx(i,j)+C[x(i,j)-mx(i,j)]
(2)
其中,n为图像的行数或列数。
图4为ACE算法处理前后钢轨扣件的弹条对比图。由图4可见,钢轨扣件的弹条经过ACE算法处理后,弹条区域的纹理获得大幅增强,较好地抑制了背景的纹理。
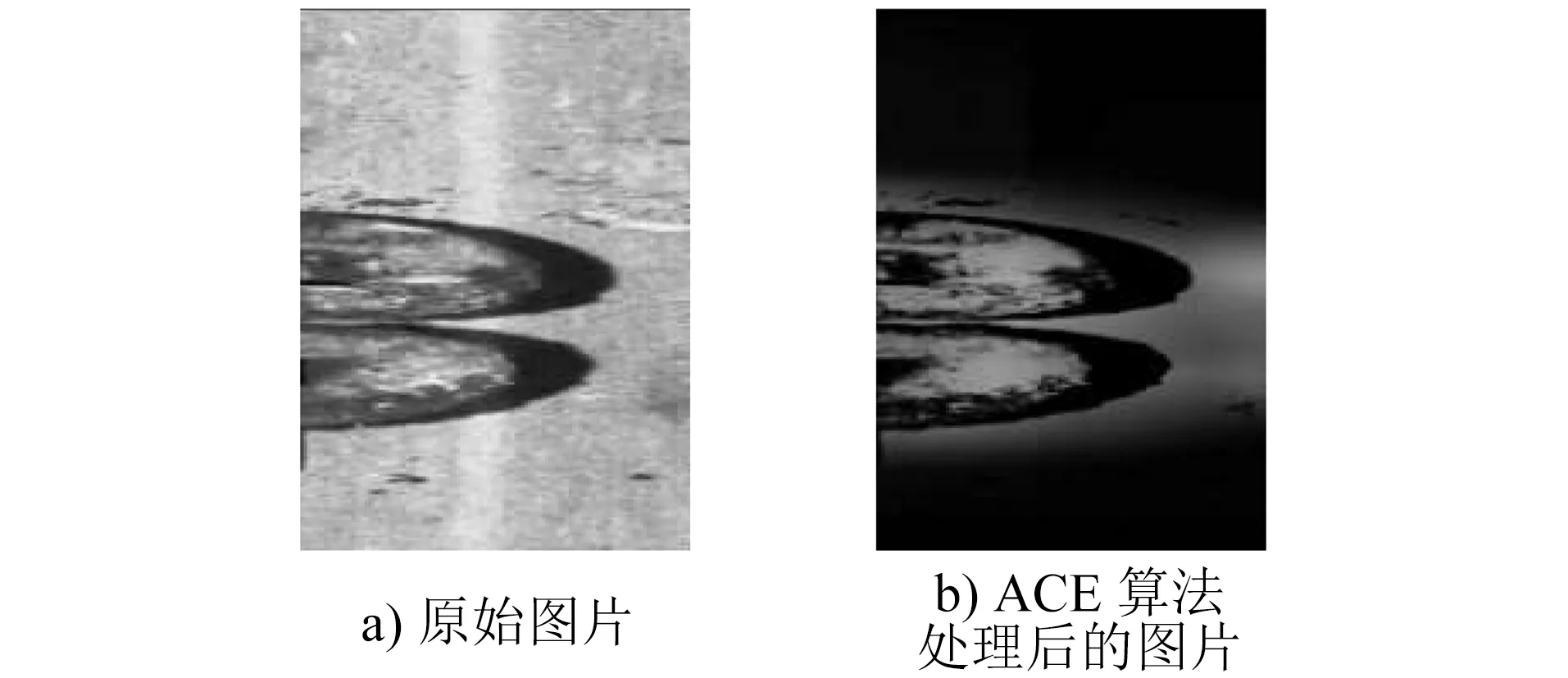
图4 ACE算法处理前后钢轨扣件的弹条图片对比
2.2 基于灰度-梯度共生矩阵的纹理特征提取
图像本身的灰度信息与图像灰度变化的梯度信息均可以描述图像的纹理特征信息[8]。灰度-梯度共生矩阵是把图像的梯度信息合并到灰度共生矩阵中,即将灰度信息与梯度信息结合,能够有效地获取图像的灰度信息与梯度信息[9]。本文利用归一化后的灰度-梯度共生矩阵计算,经由ACE算法增强纹理细节后扣件弹条图像的纹理特征参数。本文使用的纹理特征统计量是相关性、灰度均值、灰度均方差、梯度均值和梯度均方差。
取图像{f(m,n)|m=0,1,2,…,N-1,n=0,1,2,…,N-1},将灰度级设为Gf。采用平方和的方法求取梯度图像{g(m,n)|m=0,1,2,…,N-1,n=0,1,2,…,N-1},即:


(3)
定义灰度-梯度共生矩阵为{H(i,j)|i=0,1,2,…,Gf-1,j=0,1,2,…,Gg-1}。其中,H(i,j)是{(m,n)|f(m,n)=i;G(m,n)=j;m=0,1,2,…,N-1,n=0,1,2,…,N-1}中元素的个数。对其进行归一化处理,使各元素之和为1,变换公式为:
(4)
因此,本文在归一化处理后从灰度-梯度共生矩阵中选取相关性、灰度均值、灰度均方差、梯度均值及梯度均方差作为图像的纹理特征参数。
则灰度均值μ1为:
(5)
梯度均值μ2为:
(6)
灰度均方差 ∂1为:

(7)
梯度均方差 ∂2为:

(8)
相关性T为:

(9)
图5~9是选取的28张钢轨扣件弹条图的纹理特征统计量柱状图。由图5~9可知,两种状态下大部分钢轨扣件的弹条在相关性、灰度均值、灰度均方差、梯度均值及梯度均方差等纹理特征统计量上存在较大区分度。但光照的影响使得部分扣紧状态的弹条与弹出状态的弹条纹理特征相似。因此,需要引入其他特征来辅助识别钢轨扣件的弹条状态。
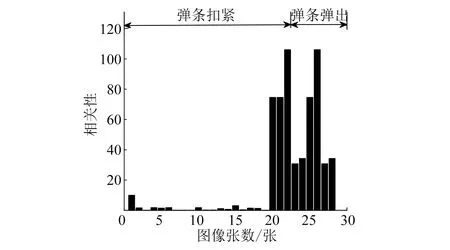
图5 弹条相关性纹理特征统计量柱状图
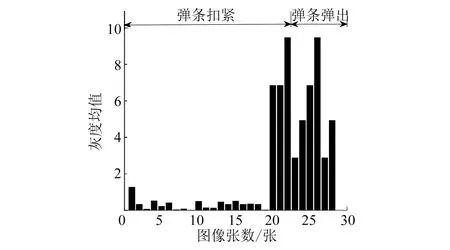
图6 弹条灰度均值纹理特征统计量柱状图
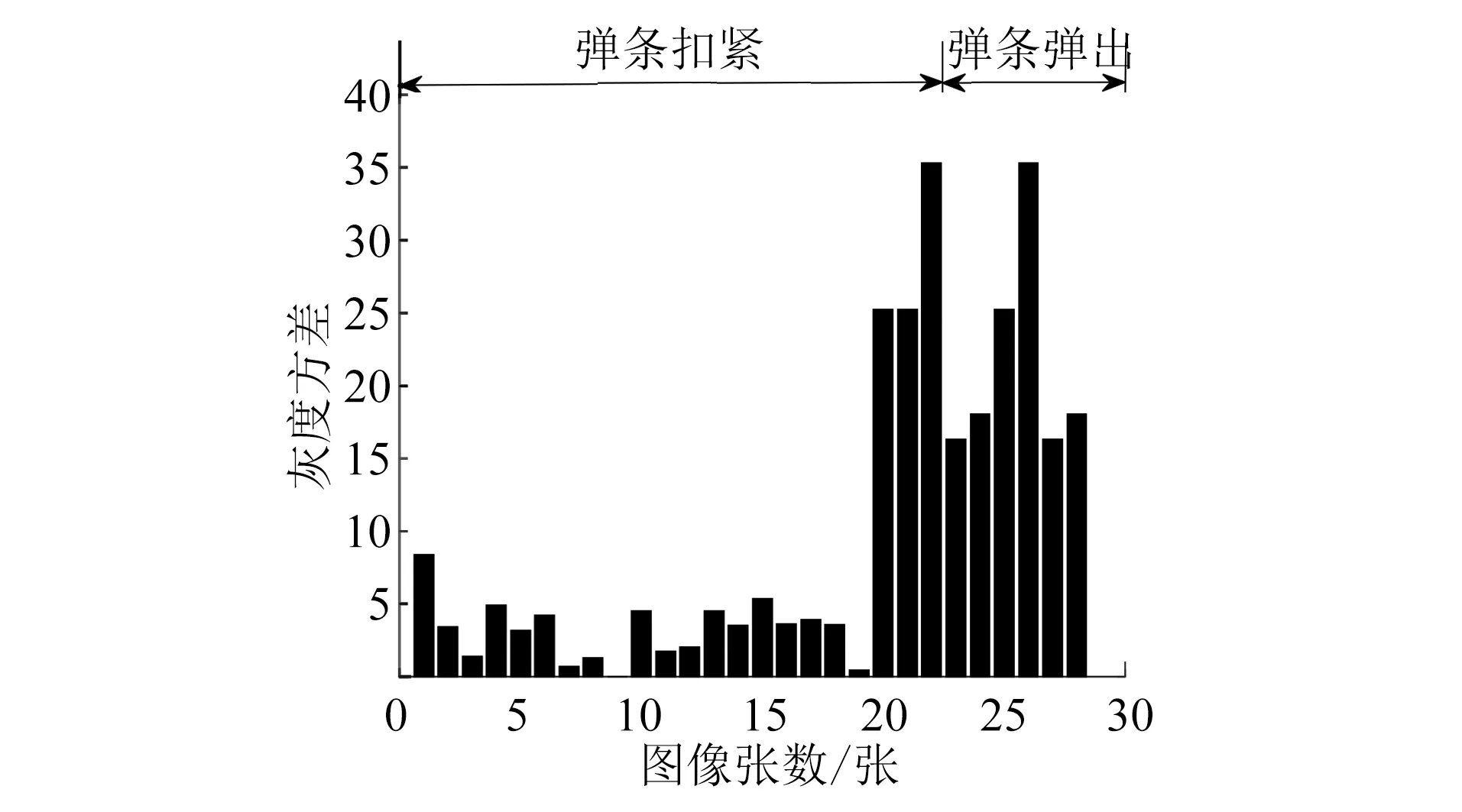
图7 弹条灰度方差纹理特征统计量柱状图
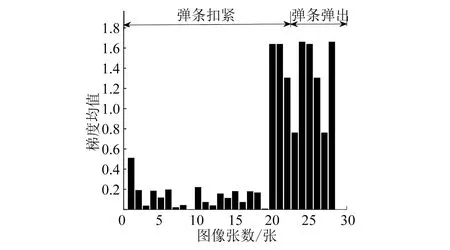
图8 弹条梯度均值纹理特征统计量柱状图
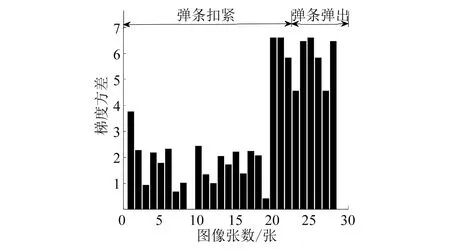
图9 弹条梯度方差纹理特征统计量柱状图
3 钢轨扣件的弹条形状特征提取
形状特征可以非常直观地刻画物体,其不受物体周围环境变化的影响,是物体的稳定信息。图像中物体形状的感知与区别极大地影响着人们对于图像的理解[10-11]。物体轮廓提取在图像处理中有着非常重要的地位,在目标识别、目标分类、图像分割等领域有着极其广泛的应用,为物体形状识别打下了良好的基础。
由于钢轨扣件的弹条图像中圆形边缘是弹条独有的形状,能较好地区分弹条在检测区域内是否存在。因此,选择弹条圆形边缘作为形状特征统计量的来源。
3.1 基于Gabor滤波器的边缘增强
二维Gabor滤波器是由正弦信号构成的高斯核函数,其奇函数部分能更好地增强图像的边缘[12]。θ方向上二维Gabor滤波器的奇函数由1个高斯函数和1个正弦函数相乘得到:

(10)
式中:
x,y——代表像素点坐标;
σ——高斯函数的标准差;
λ——Gabor滤波器的波长;
θ——Gabor滤波器的方向角。
若一种纹理的功率谱能量占绝对优势,另一种纹理的功率谱能量处于相对弱势,则利用Gabor滤波器图像中两种纹理的交界边缘会获得一定的增强[13]。若将不同时频域特性Gabor小波函数应用到变换中,则可输出图像不同的局部边缘特征。选取合适的σ,λ,θ,结合上述Gabor滤波器的带通特性,则弹条纹理的功率谱能量将得到大幅增强,而背景纹理的功率谱能量会被抑制。因而图像中弹条区域具有较大的幅值响应,而背景区域的幅值响应较小,从而增强了弹条的圆形边缘。Gabor滤波前后钢轨扣件的弹条对比如图10 所示。
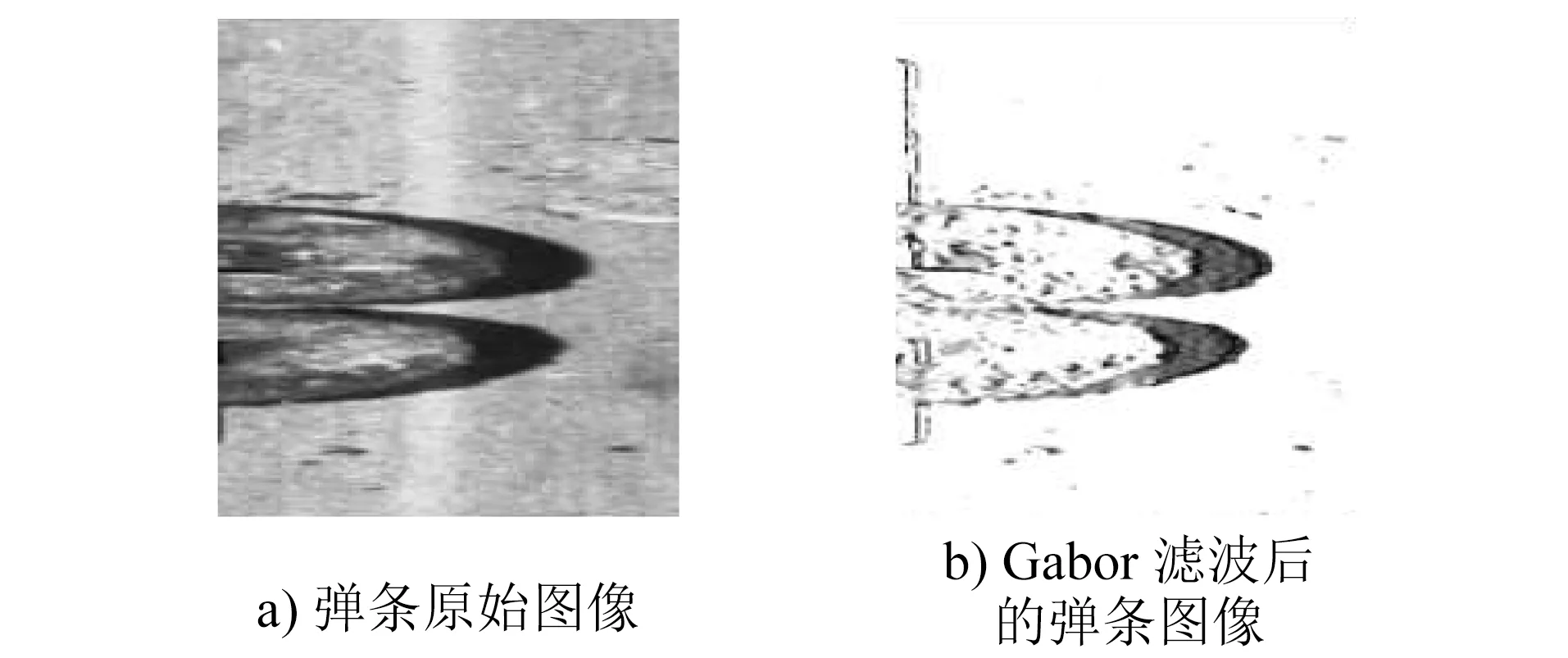
图10 Gabor滤波前后弹条对比图
3.2 基于距离变换的形状特征提取
图像在经过Gabor滤波后,虽然弹条圆形边缘获得增强,但其内部仍然存在一定的噪声干扰,影响后续的形状特征提取。为了更好地突出弹条圆形边缘的轮廓,利用距离变换法对图像进行处理,具体步骤如下:
1) 计算弹条图像中所有的内部点和非内部点,点集分别为S1,S2;
2) 计算S1中的每一个内部点(x1,y1)到外部点S2(x2,y2)的最小距离,这些最小距离构成集合S3。
3) 距离变换后的灰度值G(x,y)为:

(11)
式中:
S3,max,S3,min——分别为集合S3中的最大值和最小值。
图11为距离变换前后的弹条对比图。由图11 b) 可见,弹条的圆形边缘较好地在图像中得以呈现,这有利于下一步对其形状特征统计量进行提取。从距离变换后的图像中提取弹条圆形边缘的形状,并采用有关形状定量测度的几何参数算法可提取圆形边缘的形状特征。
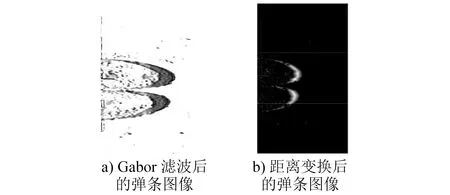
图11 距离变换前后弹条对比图
本文选取面积S、圆度C、最小外接矩形长度L、最小外接矩形宽度W及最小外接圆半径R等参数来描述圆形边缘的形状特征。
4 基于SVM的潘得罗扣件的弹条状态识别
在工程应用中,通过人工设置复特征向量中参数的阈值并不适合,而分类器越来越被广泛地应用于环境复杂、特征参数较多的扣件状态识别中。
由于SVM在解决小样本、非线性及高维模式识别问题上有着突出的表现[14],因而 SVM成为目前最常用、效果最好的分类器之一。本文采用SVM分类器。
选择μ1、∂1、μ2、∂2及T等5个统计量作为图像的纹理特征统计量,组成纹理特征向量FGGCM。选取S、C、L、W和R等5个统计量作为钢轨扣件的弹条形状特征统计量,组成形状特征向量FSHAPE。
为了更好地发挥纹理特征与形状特征各自的优势,并且根据潘得罗扣件的特点,将样本空间上的FGGCM与FSHAPE以复向量的形式组合成为复特征向量空间。即复特征向量FGGCM+SHAPE为:
式中:
λ——5个复特征向量各自对应的权重系数。
式(12)中,为了达到最佳识别效果,λ可以被设置成不同的特征组合比例。
5 试验结果与分析
为了验证本文所提算法的准确性,本文以在地铁线路现场用线阵相机拍摄的500张钢轨扣件图片作为试验对象。
本试验使用的计算机为64位Win10操作系统,4核处理器,主频2.10 GHz,内存8.00 GB。
将500张钢轨扣件图片分为训练集和测试集。训练集中有200张钢轨扣件图片,测试集中有300张钢轨扣件图片。将训练集中的钢轨扣件图片按上述方法提取弹条纹理特征与形状特征,且组合成融合特征向量,并将其放入SVM分类器中训练。训练完成后,使用SVM分类器对测试集图像进行状态检测。具体分类结果如图12~16所示。
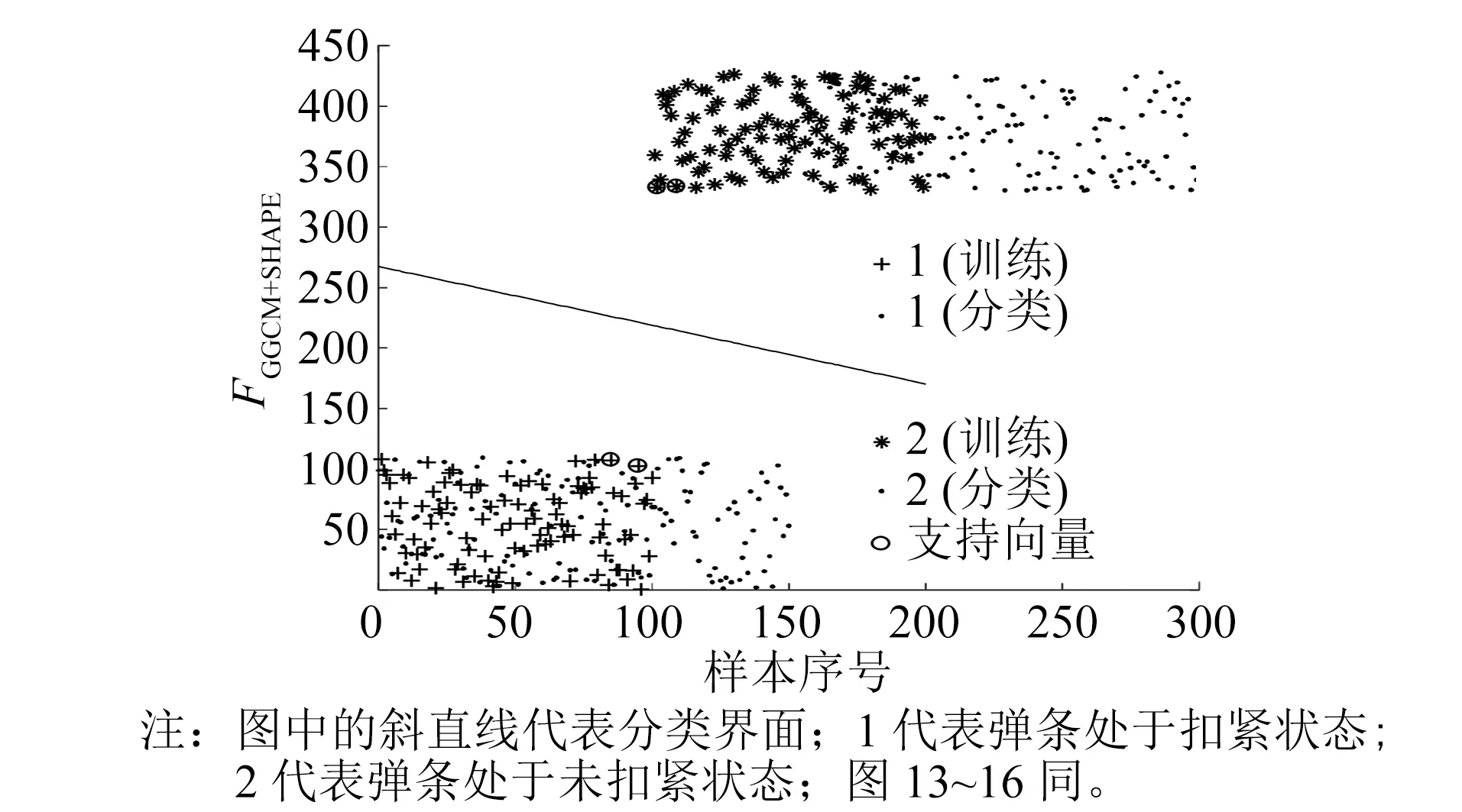
图12 1号SVM分类器分类结果图
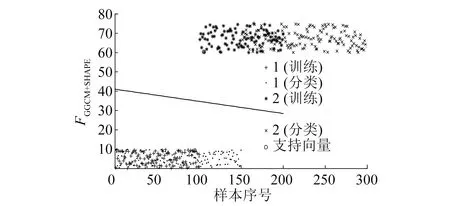
图13 2号SVM分类器分类结果图
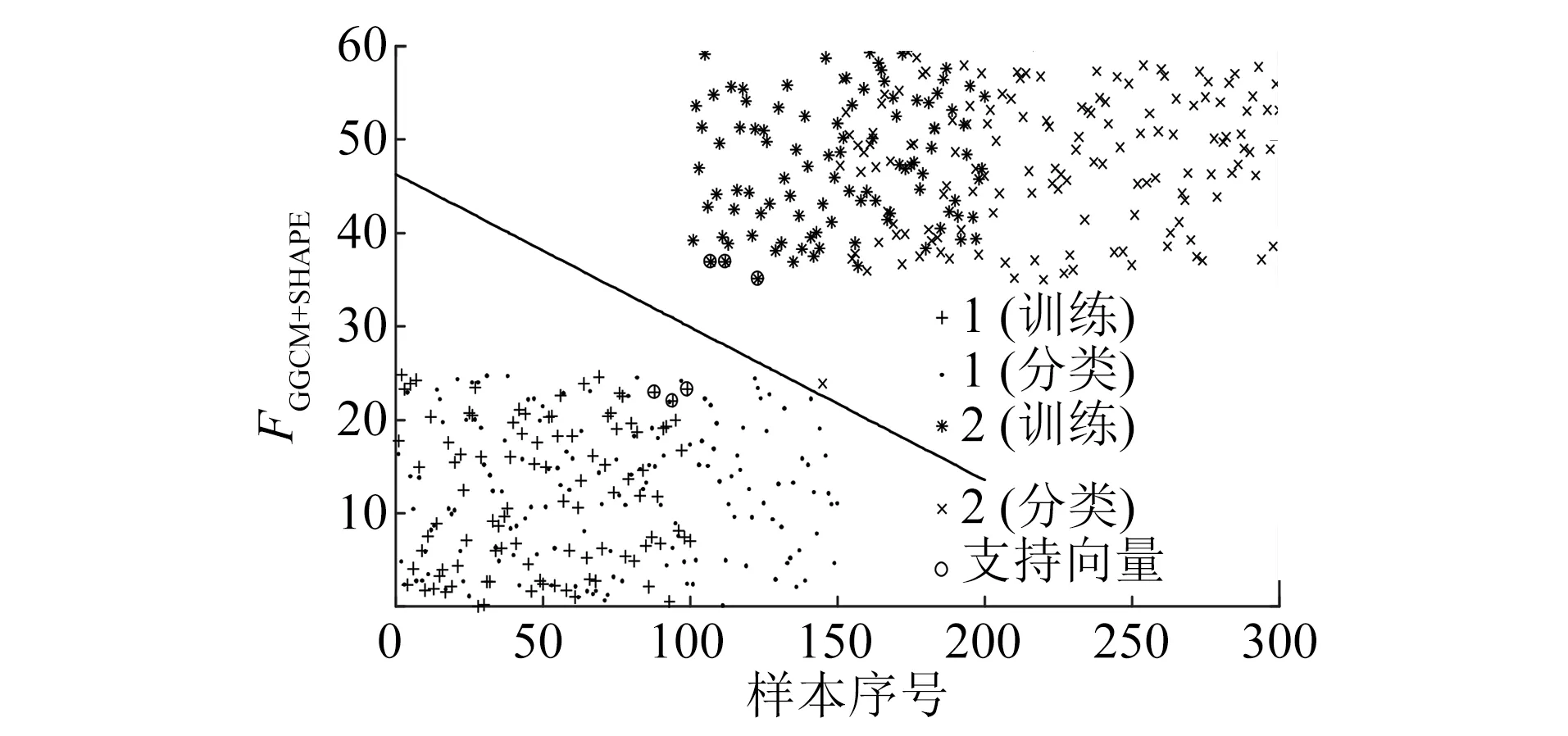
图14 3号SVM分类器分类结果图
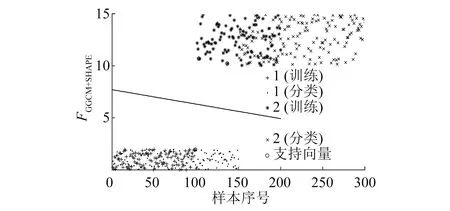
图15 4号SVM分类器分类结果图
图12~16采用不同形状的图例标识出了训练样本与测试结果。当仅有5个SVM分类器的识别结果均为1时,判定钢轨扣件的弹条处于扣紧状态。程序最终测试结果与单一特征程序测试结果如表1所示。
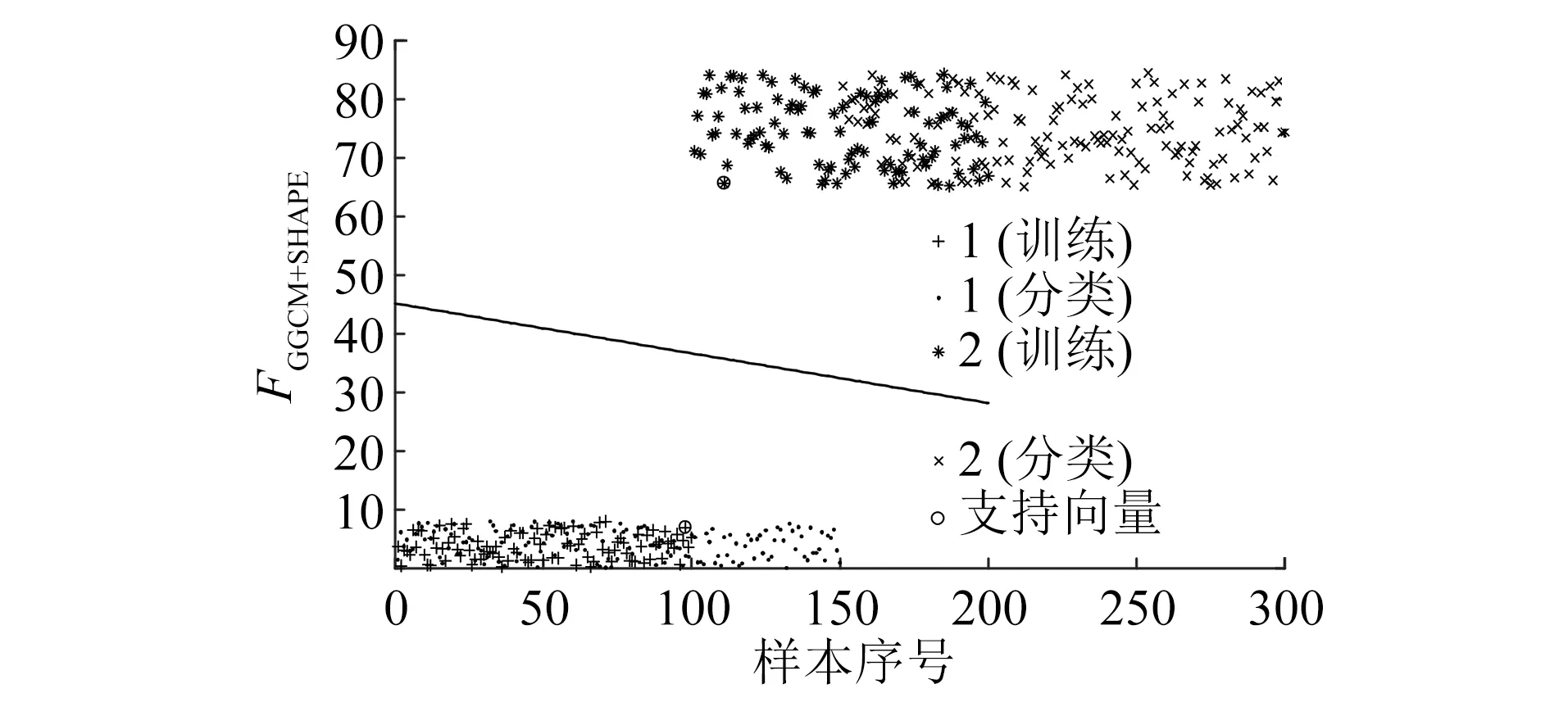
图16 5号SVM分类器分类结果图
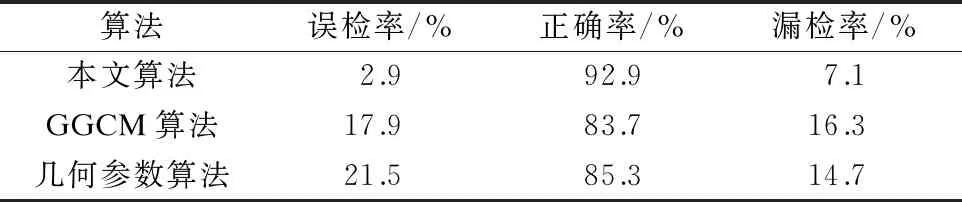
表1 各种算法测试结果对比表
由表1可知, 本文算法取得了较低的误检率、相对较高的正确率以及相对较好的漏检率;相较于单独使用GGCM算法,本文算法的误检率减少了15%,正确率提高了9.2%,漏检率减少了9.2%;相较于单独使用几何参数算法,本文算法的误检率减少了18.6%,正确率提高了7.6%,漏检率增加了7.6%。综上所述,本文算法有效地提高了钢轨扣件弹条状态识别的准确率。