基于北斗导航的安全监护机器人设计
2021-06-28朱温涵诸剑郑阳梁昊达
朱温涵,诸剑,郑阳,梁昊达
(南京工业大学浦江学院,江苏南京,210000)
0 引言
目前,国内大多数幼儿园及小学的放学时间在17:00之前。许多家长反应,该时间段常常与工作时间段冲突,如何安全接送儿童这一问题为家长们带来了很大的负担。此外,因为孩子对外界的新鲜事物充满了好奇心,缺乏自我保护能力[1],所以这就给一些不法分子提供了乘虚而入的机会,制造了一系列冒领、错接、拐骗和绑架等儿童安全事故[2],引起了社会的关注。
为解决上文问题,本文设计了一种基于北斗导航的安全监护机器人,利用创新牵引手环[3]和双卫星定位技术[4]对儿童进行监护,在语音播报的提醒下,既可让儿童自行熟悉回家路径,又能够让其监护人随时掌握儿童所处位置,可用于多种情况下的儿童监护,大大提升了儿童接送的可靠性和安全性。
1 总体设计
该机器人系统共包括STM32F1、ATK1218北斗和GPS信号接收模块、HX711压力传感器及GSM短信模块等。以STM32F1作为机器人主控板,控制和驱动电机运动,同时对各传感器、卫星信号模块所接收到的数据进行处理,并将其呈现在LCD液晶显示屏上;此外,安全监护机器人在陪同孩童沿指定路线回家时能够不断接收导航模块的经纬度信息从而与设计时所给定的警示界限作比较,当达到报警条件时,语音播报提示儿童没有沿事先规划好的路径回家,同时若孩童超出指定距离较多时机器人将通过GSM模块向其监护人的指定终端设备发送警示信息及当前经纬度信息,以达到安全监护的功能。
2 硬件设计
为使各模块能发挥最大用途,且在设计基础上能为添加各模块留足相应的空间,故本设计机器人的总体结构采用软件Solidworks进行三维建模,先绘制各个部分的零件图再进行整体装配。在机器人移动部分,使用4个自主定制的直流电机带动海绵内胆轮运动,能够有效跨越不平缓的陆地;在信号接收部分,使用北斗导航及GPS双模块接收卫星信号,为信号强度提供了保证;在信号发送部分,使用GSM短信模块向终端发送警示信息;此外,以上各个功能的实现与否均在人机交互界面显示。
2.1 卫星接收模块
安全监护机器人地理位置信息采集多数采用全球定位系统定位技术[5],然后利用全球移动通信系统短信息服务实现机器人运动数据的无线远程传输,这种方式结构较复杂。北斗卫星导航系统是中国自行研制的全球卫星导航系统,其不但有定位功能,而且具有报文通信功能[6]。将北斗卫星的导航功能和GPS定位互补使用,可以解决定位信息在关键时刻受限制的缺点,也可以解决使用单一定位系统定位不确定的问题。所以应用GPS/北斗导航双的定位更可靠、数据处理能力更强,也就意味着孩童的安全更容易得到保障。GPS北斗双卫星定位模块如下图1所示。
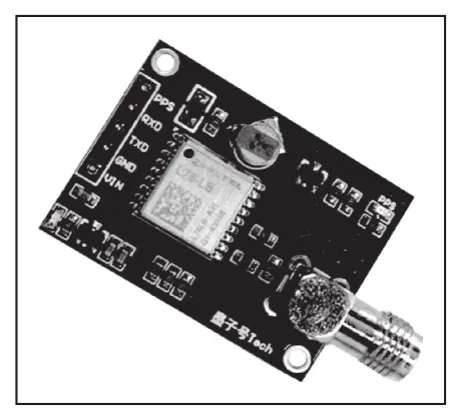
图1 GPS北斗双卫星定位模块
2.2 GSM模块
本设计机器人采用的GSM模块是SIMCOM公司推出的一款高性能工业级GSM/GPRS模块,其SIM800系列设计在官方设计上进行了优化,供电采用了高效开关电源,SIM卡质量更坚固。该模块支持双频,支持短信息、数据通信、语音传输等服务,具有体积小、功耗低、集成度高、传输速率快等优点。主要通过串口传输标准的AT命令对模块进行控制,进行各种无线通信功能。当接收到报警指令时,GSM模块立刻启动,通过基于AT指令的PUD-Model编码将汽车状况以文本模式发送至用户手机上。
2.3 牵引手环的创新设计
本机器人特殊设计牵引手环以解决牵引儿童时舒适度这一问题。在手环材料方面,主材料使用硅胶,TPU等一系列环保,舒适度性、耐用性和防污性能,防水性能都较高的材质;其次在创新方面会加入温度感受器,心率感受器,来感受孩子在路上的情况以防不测。在外观方面,为迎合孩子的喜好设计了一系列的卡通图案,颜色更多样;在传感器上,加入了压力传感器及温度传感器,并在手环上添加密码锁以保证孩童的安全。
使用时,只需孩童自行简单地套上牵引手环即可。其中,温度传感器的作用是检测孩童实时健康状态,压力传感器的作用是当机器人移动时主控板通过压力传感器得到的数据对电机速度、运动方向不断调整。
3 软件设计
本设计机器人为套上手环后一键启动进行全自动化安全监护。程序中运用中断较多,而硬件上STM32中断口的丰富为程序编写提供了便利。此外各模块的底层代码均已开源,修改编写更为便捷。
当儿童套好手环后,机器人将自行启动并对所有模块完成初始化。孩童牵引机器人过程中如若压力适宜且机器人在事先规定好的经纬度上运行,则正常跟随,否则语音播报模块将提醒孩童、短信收发模块会将报警信息发送至监护人终端,当孩童到达指定经纬度时,监护结束。
4 机器人调试
在本节中,将对安全监护机器人北斗导航模块与GSM通信的调试过程进行简要说明。
4.1 北斗导航模块的调试过程
在本设计中,因为仿真环境下北斗模块与GPS接收数据无明显差别,所以采用已有的Virtual GPS进行仿真。在Proteus中搭建好电路,并打开计算机的虚拟串口将其作为理想中卫星向MCU传递数据,最终在LCD1602液晶屏上显示。
由仿真结果可知,LCD屏幕上此刻显示的是东经119.910166°,北纬29.526313°。经过高德地图经纬度查询,此处位于南京工业大学浦江学院溧水校区附近。此外,在翔宇路南地铁站及南京南站进行了虚拟GPS仿真调试,得到结果如下表1所示。通过查询,LCD1602上显示的位置与通过经纬度查询得到经纬度几乎相同,故北斗导航模块仿真结果正确,调试结果较好。

表1 虚拟GPS仿真调试结果
4.2 GSM通信的调试过程
在本次调试中,使用GSM直接与电脑上位机进行通信测试,模块通过TTL接口与电脑上位机通信,电脑端通过串口发送相应指令,串口助手上显示对应数据。在本次调试中,向串口调试助手发送了AT+CSQ指令,此指令可查询北斗导航模块信号的质量。
由返回的数据得到数值为27,据查阅信号强度最大可返回31,一般大于10即可。故GSM通信的信号较强。
5 总结
本次设计使用STM32作为监护机器人的主控板实现了一套基于北斗导航的安全监护机器人的设计方案。该机器人打破了过往使用GPS的限制改用北斗导航与GPS双模块,设计了带有压力传感器的牵引手环。同时还实现了语音提示、短信报警等功能,一定程度上减轻了家长因工作冲突带来的负担,解决了接送孩童的安全问题。