椰糠条栽培番茄的蒸腾反馈智能灌溉系统研制
2021-06-28丁小明张凌风裴庆余尹义蕾王春辉潘守江鲁少尉
王 柳,丁小明,李 恺,张凌风,裴庆余,尹义蕾,王春辉,侯 永,潘守江,田 婧,鲁少尉
椰糠条栽培番茄的蒸腾反馈智能灌溉系统研制
王 柳,丁小明※,李 恺,张凌风,裴庆余,尹义蕾,王春辉,侯 永,潘守江,田 婧,鲁少尉
(1. 农业农村部规划设计研究院设施农业研究所,北京 100125;2. 农业农村部农业设施结构工程重点实验室,北京 100125)
为满足番茄椰糠条栽培条件下自动精量灌溉的需要,该研究研制了一套蒸腾反馈智能灌溉系统,包括蒸腾检测组件、通信组件、决策组件和灌溉组件。蒸腾检测组件基于压力传感器测定番茄蒸腾量;决策组件基于椰糠条的持水特性和番茄蒸腾量的变化建立了灌溉精量控制模型,精确控制水泵启动和关闭,使灌溉量根据作物蒸腾量的多少变化,并根据回液量及其电导率(Electrical Conductivity,EC)值变化判断调用正常灌溉模式或淋洗模式,使椰糠条始终处于适宜的含水量范围内,保持一定的水气比,以利于番茄根系生长和吸收营养液,解决灌溉不足造成的干旱胁迫和灌溉太多造成的营养液浪费和回液处理量大的问题;通信组件用于各模块间信号的传递。以荷兰RIDDER公司研发的基于光辐射积累量控制的灌溉系统为对照,检验该蒸腾反馈智能灌溉系统的应用效果。结果表明,在番茄盛果期,该系统的灌溉量比对照增加9.4%,回液量减少18%,且回液EC值比较稳定;与定时灌溉相比,减少灌溉量32%,减少回液量57%,有更多的营养液被植物吸收利用。栽培效果显示,使用该系统灌溉的番茄产量、株高、节数与使用荷兰RIDDER公司研制的灌溉系统的没有显著差异,取得了与之相同的灌溉效果;而且,在5 000 m2温室内设备设计使用年限10 a条件下,该智能灌溉系统年运行成本与之相比还降低了 20.8%,并能够满足自动精量灌溉的需求。若根据基质类型不同调整灌溉控制模型参数,该系统也可应用于岩棉条栽培、混合基质盆栽等其他无土栽培的智能精量灌溉。
灌溉;蒸腾;传感器;无土栽培;番茄;压力传感器;椰糠条
0 引 言
番茄是中国设施中栽培最多的蔬菜,2016年设施栽培面积超过80万hm2,占设施蔬菜总面积的16%[1]。无土栽培技术因其高产、克服连作障碍,在设施园艺中被广泛应用。椰糠因其成本较低、理化性状良好、取材天然、不污染环境等特性逐渐成为重要的无土栽培基质,近年来推广迅速[2]。无土栽培营养液的恰当供给是作物吸收养分和水分关键。无土栽培基质体积远小于土壤栽培,对水分和养分的缓冲性差,若不能及时供液会造成生产上灾难性的损失,若不间断供液,作物根系长时间浸没于饱和营养液中会使根际通风不良,不利于根系的呼吸,从而不利于根系和作物的生长,严重的导致根坏死,因此必须根据作物的需求来调整营养液的灌溉量和灌溉频率。对于开放式(非循环)营养液供液系统,超出作物需求的营养液供给还会造成水和肥料的浪费和环境污染,对于封闭(循环)式营养液供给系统,超量营养液供给导致大量的回液增加了处理量,特别是以椰糠为栽培基质的系统中,回液中含有有机物、杂质颗粒和色素,回收利用更加困难。因此,恰到好处地自动精量供给营养液能有效解决上述问题。土壤栽培中讲究“见干见湿”,以调节水气平衡,而在基质无土栽培中,营养液也是间歇供给。
目前国内外基质栽培自动供液方式有以下几种:1)根据经验使用定时器实现定时定量供给,这是中国基质栽培采用的主要方式[3-4],这种方式有可能会造成早晚灌溉过多,而中午蒸腾量大的时候灌溉不足;2)基于Penman-Monteith模型[5-6]或修正的Penman-Monteith模型[7-8]估测的蒸散量来决策营养液的供给,这种方式需要的气象参数很多,且难以获取,许多参数是根据经验选取的,有很大的局限性;3)利用介电传感器如时域反射仪[9-10]、频域反射仪[11-13]、电容传感器[14-15]以及导热率传感器[16]等测得的基质体积含水率和水分-电导率-温度组合传感器测得的电导率[17-18]决定灌溉频率,但这些方法存在传感器价格昂贵、需要校正和测量数值受基质结构、温度和盐度的影响等缺陷;4)通过监测作物的反应来控制灌溉,如监测作物的反射率[19]、图像[20]、热平衡流量传感器测得的茎液流或直径传感器测得的直径变化[10,21-22]、叶片温度[23]等,但这些方法受取样的代表性和其他因素影响准确率较低,且作物反馈缺水时已经受了伤害;5)无土栽培中较常用的是灌溉控制模型是基于太阳辐射,当太阳辐射积累到一定量时启动一次灌溉[24-26],这种方式考虑了营养液需求的日变化,但他是一种间接控制模型,因为不同品种作物不同生长阶段叶面积不同,同样的辐射累积量,作物的蒸腾量也不一样,因此需要根据经验调整不同作物不同时期的辐射累积量,作物的蒸腾同时还受温度和风速的影响,基于一个地方气候条件和种植品种建立的灌溉模型在另一个地方未必适用,这就是很多荷兰先进的基于太阳辐射累积量的灌溉控制系统引进中国后“水土不服”的原因;6)基于张力计[27]或负水头供液决策的自动灌溉方式[28-29],装置比较复杂,对于成品的椰糠条张力计或多孔陶瓷盘难以安装,因此无法用于椰糠条的栽培;7)基于平板天平自动称量种有作物的基质或容器的质量,当其达到设定阈值时则启动灌溉[10,30-33],质量随时间的降低量反应了蒸腾、蒸发和淋溶损失的水量,从而可以实现简单而直接的灌溉控制,该技术在国外已授权专利,荷兰的PRIVA、RIDDER、Hoogendoorn等公司可以提供该技术,但设备和支撑软件较为昂贵[34],且控制模型不为中国所掌握。
鉴于以上方法存在的问题,本研究采用压力传感器检测基质质量和回液质量的方法,开发一种蒸腾反馈智能灌溉系统,以期能根据作物蒸腾规律及时、精准控制灌溉。本灌溉系统可应用于作物的设施无土栽培中,达到节约水肥的目的。本研究对于降低精准灌溉系统的应用成本具有重要意义。
1 椰糠条栽培番茄的蒸腾反馈智能灌溉系统构成
1.1 总体结构
基于压力传感器的椰糠条栽培番茄的蒸腾反馈智能灌溉系统如图1和图2所示,由蒸腾检测组件、通信组件、决策组件和灌溉组件组成。其中,蒸腾检测组件由基质质量检测组件和回液检测组件构成(图3),基质质量检测组件包括压力传感器、回液收集槽和底座;回液检测组件包括回液引流管(可选)、回液检测罐、托盘、压力传感器、底座、pH值传感器(可选)、EC值传感器(可选)。通信组件包括2个LoRa®模块,一个放置于中央控制室,另一个放置于温室中。决策组件由放置于中央控制室的计算机和控制模型构成。灌溉组件包括营养液工作液储罐、继电器、潜水泵、供液支管、供液毛管和滴箭。
计算机和放置于中央控制室内的通信组件间为有线连接;放置于中央控制室内的通信组件和放置于温室内的通信组件间为无线连接;放置于温室内的通信组件和继电器、基质质量检测组件、回液检测组件有线连接。基质质量检测组件和回液检测组件检测的实时质量数据信号和继电器开关状态信号经过通信组件传输给决策组件中的控制模型调用,控制模型给出的控制信号通过通信组件传输给继电器控制潜水泵的开关,从而实现灌溉控制。
1.2 系统硬件选型
系统的硬件规格型号和性能如表1所示。考虑到果菜长季节栽培的需要和无土栽培基质质量范围差别较大,选用0~500 kg大量程压力传感器作为检测基质质量的传感器,最大误差不超过0.15 kg,一般每个基质条上4株番茄每天灌溉量不少于2 L,最大误差占最小灌溉量的7.5%,在可接受范围内。回液收集槽和底座采用轻质的铝合金材质自制,安装运输方便。每个基质条上种植4株番茄,灌溉量最大时一般每天每株不超过2 L,回液量最大一般不超过灌溉量的40%,因此选用0~5 kg量程的压力传感器作为回液质量检测的传感器,对应选用5 L的量杯作为回液检测罐,托盘和底座采用耐腐蚀的不锈钢自制。RS-485标准的数字通信网络能在远距离条件下以及电子噪声大的环境下有效传输信号,使得连接本地网络以及多支路通信链路的配置成为可能[35]。因此本系统采用数据转换仪表和变送器将压力传感器信号转换成RS-485输出信号,对应灌溉组件中的继电器的输入信号也为RS-485。LoRa®模块具有功耗低、传输距离远、信号穿透性强、灵敏度高、稳定性好、兼容性广、组网方便等优点,选用其作为通信组件。3个小区共种植番茄480株,按最大灌溉量每天每株2 L计,每天灌溉总量不超过1 m3,因此选用1m3的营养液工作液储罐,灌溉组件中的支管、毛管和滴箭为原高架栽培灌溉系统原有配置,潜水泵根据管路长短和滴箭流量选型。本试验系统中采用了营养液工作液储罐的方式,营养液工作液一天一配,未来系统成熟后可连接到施肥机。pH值传感器和EC值传感器为选装设备,本试验中暂时未安装,由人工检测。
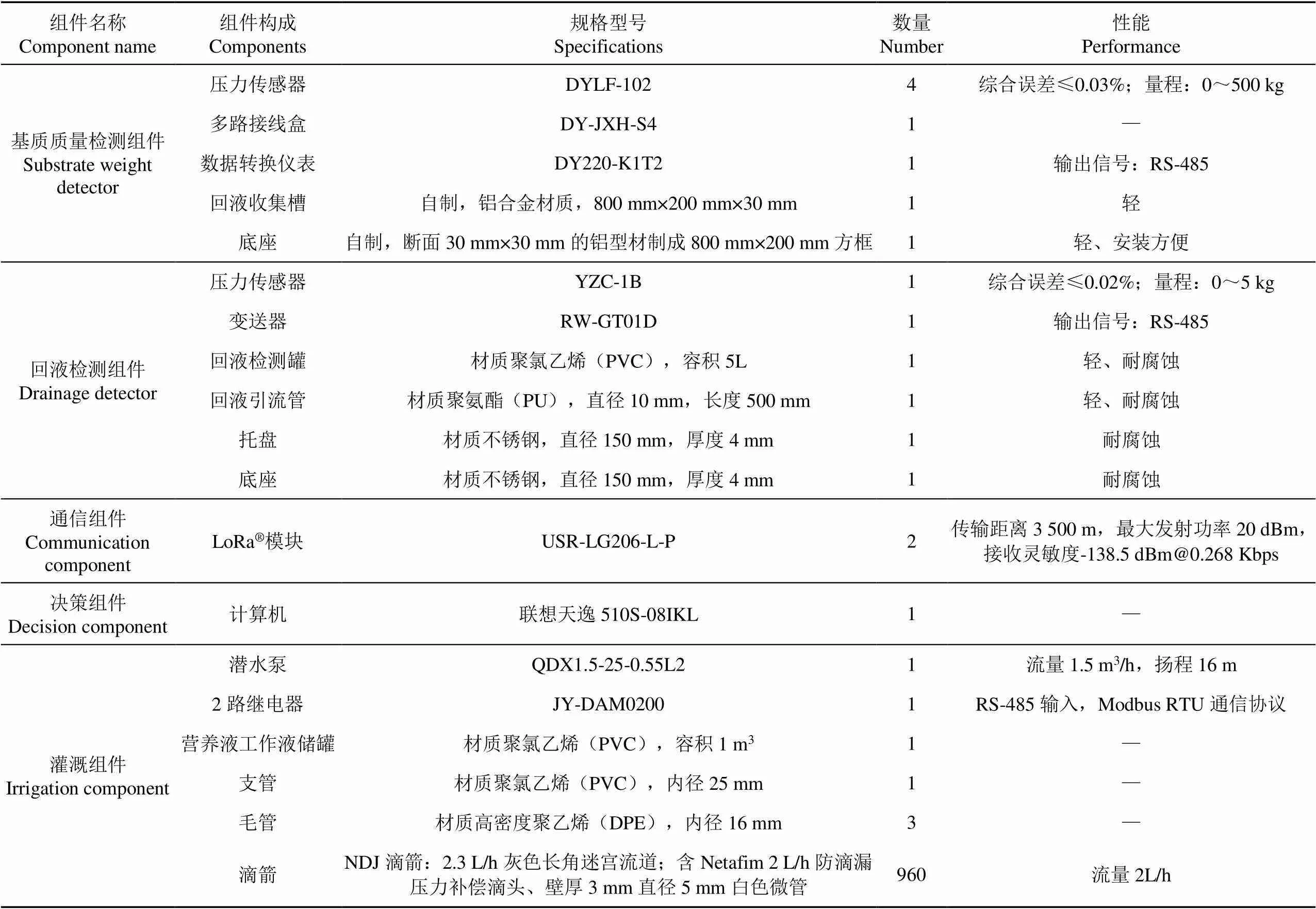
表1 系统硬件规格型号及性能
2 灌溉决策模型参数选择及系统软件设计
2.1 灌溉决策模型及参数选择
2.1.1 基质结构及其特征
基质的性质是灌溉决策的基础。本试验采用的是荷兰FORTECO®Power商品椰糠条和Grodan®Delta商品岩棉块,性质比较均一,椰糠条泡发后体积为100 cm× 15 cm×10 cm,6面塑料膜包裹,仅底边留有排液孔,岩棉块体积为10 cm×10 cm×6.5 cm,4面塑料膜包裹,1面与椰糠接触,仅1面暴露于空气中,蒸发损失很小,几乎可以忽略,因此灌溉量减去回液量即为蒸腾量。可以通过检测基质和回液的质量计算蒸腾量,进而基于蒸腾反馈精准调控灌溉量。
取3个干椰糠条,称质量,用量杯加水,15 min加1次,每次1 L,每个椰糠条加水15 L,放置1晚排除重力水,第2天早上排除多余的水后称质量,2次质量相减即可得其持水量为(8.32±0.35)kg;同理测得岩棉块的持水量为(0.53±0.03)kg,则1个椰糠条和4个岩棉块的持水总量为(10.44±0.47)kg。
2.1.2 模型的选择
1)经验定时灌溉模型
于番茄第一穗果成熟期,本研究请有经验的园艺师设定经验定时灌溉模式,作为控制模型选择的参考(表 2),试验结果显示,3个相似的晴朗或多云天气下回液占比均在30%左右。同时,根据荷兰种植者建议[36]回液占灌溉量的比例为25%~30%,当其低于10%~15%时基质袋中的pH值和EC值会偏离合理的范围,并且很难调整,当回液的占比超过30%,基质袋中的环境稳定,但耗水耗肥较多。鉴于此,经验定时灌溉模型控制下耗水耗肥较多,且灌溉频率和单次灌溉时间的确定严重依赖于园艺师的经验,不利于推广。
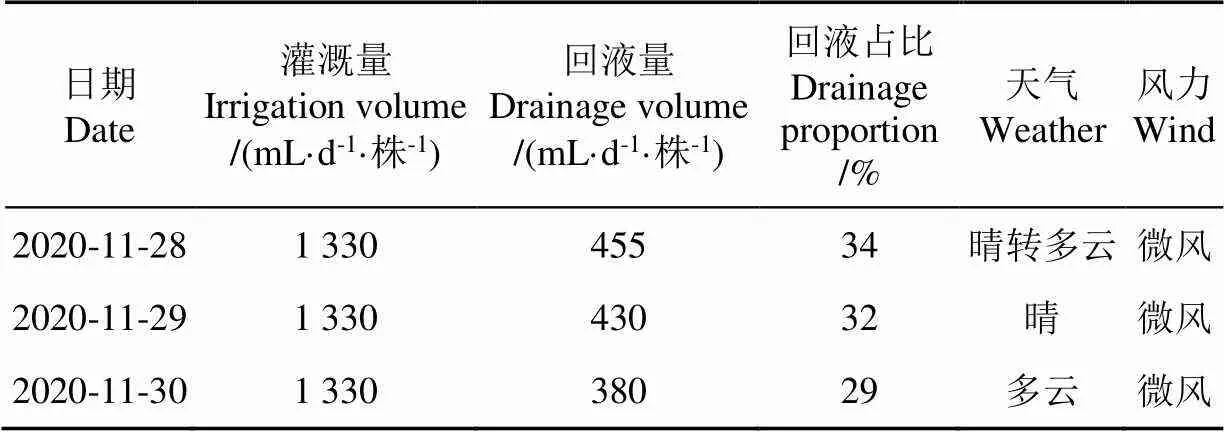
表2 经验定时灌溉试验条件和结果
注:09:00、09:45、10:30、11:15和12:00每次灌溉6 min;12:45和13:30每次灌溉5 min。
Note: Each time irrigated 6 min at 09:00, 09:45, 10:30, 11:15, and 12:00; Each time irrigated 5 min at 12:45 and 13:30.
2)灌水上下限控制模型
土壤栽培的自动灌溉一般采用灌水上下限的控制模式,当土壤含水量达到下限时启动灌溉,达到上限时则停止。有研究表明[37],综合产量、畸形果率和灌溉水利用效率等因素,番茄开花坐果期0~60 cm土层的土壤含水率保持在田间持水率的80%左右为宜。参考该结果,本研究将基质持水量的80%设为灌溉下限,基质持水量的100%设为灌溉上限进行预试验。试验结果显示1 d仅灌溉2次,总灌溉时间51 min,灌溉量1 796 mL/(d·株),回液量达到650 mL/(d·株),回液占比达到38%,灌溉量远超过番茄需求量,造成大量的水肥浪费。因此,土壤栽培的灌溉自动控制模型对于持水性差的基质并不适用,椰糠条栽培番茄灌溉应遵循少量多次的原则。
3)蒸腾反馈智能灌溉控制模型
鉴于上述2种灌溉控制模型对于椰糠条栽培番茄的精准灌溉并不适用,本研究在分析番茄每日蒸腾变化规律的基础上开发一种蒸腾反馈智能灌溉控制模型。
有研究表明[31],基质栽培番茄一天中蒸腾速率呈梯形变化,07:00左右蒸腾速率开始迅速上升,在12:00左右达到高峰,然后维持在这一水平直至15:30左右开始下降;同时,也有研究[32]证明了岩棉栽培番茄在不同生育期、不同天气(晴天、阴天)的耗水速率基本符合上述规律。还有研究表明[22,38],番茄茎流速率在12:00—13:00左右达到峰值。
椰糠条栽培基质体积小,4棵番茄共用15 L基质,每株不到4 L,对水气的缓冲性小,因此需根据其蒸腾速率的日变化规律精确调控水肥供给;同时从工程设计的角度考虑,应尽量避免灌溉设备频繁启停,据此本研究设计了基于蒸腾反馈的智能灌溉控制模型如图4所示。该控制模型分为正常灌溉模式和淋洗模式,通常情况下使用正常灌溉模式,当基质EC值超过植物耐受范围或蒸腾量特别大时采用淋洗模式。
2.1.3 蒸腾反馈智能灌溉控制模型参数的确定
采用蒸腾反馈智能灌溉控制模型需要确定日出时刻、日中时刻、日落时刻、开始灌溉时刻、达到基质持水量时刻、停止淋洗时刻、停止灌溉时刻、基质含水量设定下限、基质含水量设定上限、基质持水量、单次灌溉时间等参数。
由前人研究[22,31-32,38]和本研究预试验可知,番茄夜间的蒸腾速率很小,蒸腾速率在日中时刻左右达到最大。据此将一天大致划分为4个时段,开始灌溉到日中时刻为第Ⅰ时段,此时需顺应蒸腾速率逐渐增大的规律,将基质含水量逐渐灌至含水量设定上限;日中时刻至停止淋洗为第Ⅱ时段,此时基质实时含水量应维持在基质持水量以上,以淋洗出基质中多余盐分;淋洗结束至停止灌溉为第Ⅲ时段,此时基质实时含水量应维持在基质持水量上下以满足午后高蒸腾速率的需要,保证有充足的水分和养分满足作物光合作用的需要;停止灌溉至第2天灌溉启动前为第Ⅳ时段,此时应使基质含水量逐渐回落至适宜的基质含水量设定下限,使空气进入基质,保证根系的呼吸作用和正常生长。第Ⅱ时段为淋洗阶段,正常灌溉模式时第Ⅱ时段的时间为0。
灌溉系统安装地点的日出、日中和日落时刻是灌溉时段划分的重要依据,其日出时刻(sunrise)计算如式(1)所示:
式中为安装地点所在地理时区,如北京的时区为东8区,=8;lo为安装地点经度,东经为正、西经为负,rad;la为安装地点纬度,北纬为正,南纬为负,rad;为日期序列数,即当天在这一年中的序列,如2月11日为42。式(1)计算结果为小于24的数值,如6.69,则表示06:41。
日落时刻(sunset)计算如式(2)所示:
日中时刻(midday)计算如式(3)所示:
有研究表明[39],高架袋培番茄一般采用流量为33 mL/min的滴箭,与本研究所选滴箭流量相同;该研究还表明[39]番茄坐果后供液量1 500 mL/(d·株)左右,每天灌溉6~8次,每次供液量100~120 mL。据此,本研究确定每次每株番茄供液量为120 mL左右,结合本研究所选用的滴箭流量33 mL/min,将单次灌溉时间确定为4 min。则每次灌溉时1个椰糠条上4株番茄的总供液量为528 mL,其质量约为0.5 kg。
当回液检测组件第1次检测到回液质量时椰糠条中的含水量达到其基质持水量,基质质量检测组件记录此时质量为(f-c,kg),如上文所述在第Ⅲ时段,基质实时含水量需围绕f-c上下波动,而在4 min的单次灌溉时间内蒸腾量很小,可忽略不计,基质实时含水量表现为直线上升,据此结合1个椰糠条上单次供液的质量为0.5 kg,将基质持水量减去1个椰糠条上单次供液质量的1/2,即(f-c-0.25 kg)设为基质含水量设定上限(3,kg)。
有研究表明[34],对于椰糠基质中的番茄,第天的最后一次灌溉到第(+1)天的第1次灌溉,基质实时含水量比基质持水量减少10%~15%,则其水分保持在最佳范围内。基质实时含水量的减少是由于蒸腾作用,为留有一定的保险系数,本研究取基质含水量设定下限为比基质持水量下降10%,结合前文测得的基质持水量10.44 kg可知,基质含水量设定下限为(f-c-1 kg)。若日出前基质实时质量达到基质含水量下限,则启动1次2 min灌溉,补充基质水分到下限以上。
开始灌溉时刻(1)需确定在日出后番茄蒸腾速率迅速增加时,根据经验,当日出后基质实时质量比基质含水量设定下限下降1个椰糠条每次供液量的1/2(即0.25 kg)时启动当天第1次灌溉,设此时的质量为(1,kg),此时的时刻为开始灌溉时刻。当日辐射越强,则日出后基质总质量越早达到1,根据对称原则,设下午停止灌溉的时刻为3,令1-sunrise=sunset-3。淋洗时间段的时长则需要根据需要回液的量和回液的EC值综合确定,设停止淋洗时刻为4。
设第Ⅰ时段,基质质量上升阶段任意时刻2的基质设定质量为(2,kg),其计算如式(4)所示:
采用正常灌溉模式时,当基质实时质量小于或等于2时,决策组件发出灌溉信号,并在接收到灌溉组件灌溉确认的反馈信号时开始计时,并在4 min后发出结束灌溉指令,如此循环,直至2=midday进入第Ⅲ时段,此时段内当基质实时质量再次达到3时决策组件发出灌溉信号,并在接收到灌溉组件灌溉确认反馈信号时开始计时,并在4 min后发出灌溉结束指令,如此循环,直至到达3时刻进入第Ⅳ时段。第Ⅲ时段结束后当回液检测组件检测到回液质量不再增加时读取此时的回液质量并计算当天的灌溉总量,计算回液质量在总灌溉量中的占比并记录。
如采用淋洗灌溉模式时,则当2≥f-c,进入第Ⅱ时段,此时段内当基质实时质量再次达到f-c时决策组件发出灌溉信号,并在接收到灌溉组件灌溉确认反馈信号时开始计时,并在4 min后发出灌溉结束指令,如此循环,直至4时刻,进入第Ⅲ时段,后续过程与采用正常灌溉模式时相同。
若根据基质类型不同调整灌溉控制模型参数,该蒸腾反馈智能灌溉系统也可用于岩棉条栽培、混合基质盆栽等其他无土栽培的智能精量灌溉。
2.2 蒸腾反馈智能灌溉控制系统软件设计
蒸腾反馈智能灌溉控制系统软件是在Qt 5.14.2软件平台下开发,前端依靠QML、JavaScript语言实现显示界面及控制逻辑,后台依靠C++语言实现数据库的操作、组件间的通信、前后端的数据沟通、日出日中日落时刻的获取。系统工作流程如图5所示。系统还配备了手动模式,以备在停电、断网、自动控制模型故障时使用。
3 蒸腾反馈智能灌溉系统应用试验
3.1 试验地点及方法
2020年9月4日至2021年1月13日在农业农村部规划设计研究院河北廊坊永清基地连栋玻璃温室A2试验区进行试验。基地温室面积5 000 m2,温室檐口高度6 m,每个试验区长×宽为34 m×16 m,试验区配置有内外遮阳、内保温、湿帘风机、加温管道,顶部为散射光玻璃。试验布置如图2所示,南北方向设置栽培行,处理组(TK)与对照组(CK)间隔排列,3次重复,处理组采用本研究开发的蒸腾反馈智能灌溉系统进行灌溉。对照组连接到荷兰RIDDER公司的施肥机,以光辐射累积量控制灌溉,该系统通过CX500工控计算机实现温室环境及灌溉自动控制,初始投入31万元,其中灌溉控制系统软硬件约9.1万元。
番茄品种为JUANITA(拜耳公司-德澳特,樱桃番茄),栽培模式采用椰糠条无土栽培。营养液为荷兰营养液配方,苗期、初花期和结果期营养液EC值分别为1.5、2.8、2.5 mS/cm,营养液pH值为5.3、5.8、5.5。2020年9月4日播种到72穴育苗盘,育苗基质为椰糠和珍珠岩混合基质;2020年9月24日移植到岩棉块;2020年10月17日定植到椰糠条,椰糠条提前2 d用营养液泡发。每小区标记3株测产。用Statistix 9软件中One-way AOV 程序进行方差分析。
3.2 试验结果与分析
3.2.1 灌溉量和回液量
应用本智能灌溉系统和使用荷兰RIDDER公司研发的灌溉系统进行灌溉的效果如表3所示。采用本灌溉系统的番茄平均每天每株的灌溉量比采用荷兰RIDDER公司研发的灌溉系统的多9.4%,回液量少18%,且回液的EC值比较稳定,说明使用本智能灌溉系统根据作物吸收营养液的规律灌溉,更多的营养液被作物利用。对比表2可知,使用本智能灌溉系统比经验定时灌溉平均减少灌溉量32%,减少回液量57%。
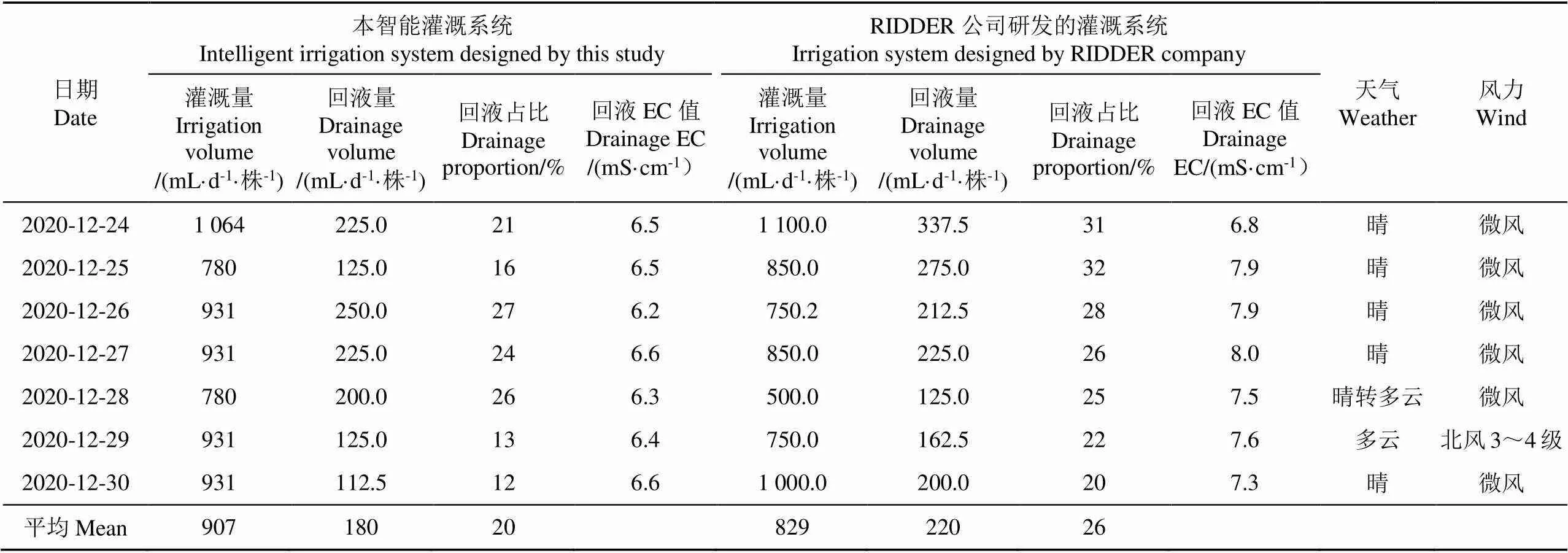
表3 本智能灌溉系统与RIDDER公司研发的灌溉系统灌溉效果对比
3.2.2 番茄生长与产量
截至2021年1月11日,使用本智能灌溉系统的番茄单株产量、株高和节数为(380±24)g、(387±8)cm和(41.2±0.8),与使用RIDDER公司研发的灌溉系统的(382±17)g、(384±5)cm和(41.4±0.6)没有显著差异(>0.05),说明使用本智能灌溉系统取得了与荷兰先进的RIDDER公司研发的灌溉系统同样的灌溉效果。
3.2.3 系统应用经济性分析
RIDDER公司研发的灌溉控制系统软硬件约9.1万元,本智能灌溉控制系统软硬件约2.4万元。永清基地采用自备井水源,当地水价标准0.23元/t,肥料采用自购单质肥调配,价格6.5元/kg。按照永清基地5 000 m2温室,灌溉控制系统使用年限10 a,每年7个月生产计算,结合试验期间2020年12月13日至2021年1月13日单月系统用水用肥估算,两系统10 a成本对比如表4所示。由表4可知,本智能灌溉系统和RIDDER公司研发的灌溉系统运行成本约1.98和2.50万元/a,本智能灌溉系统年均运行费用是RIDDER公司研发的灌溉系统的79.2%,节约成本约20.8%。

表4 本智能灌溉系统与RIDDER公司研发的灌溉系统成本对比
4 结 论
1)基于番茄栽培椰糠基质的质量变化和回液量的检测,研制了一套蒸腾反馈智能灌溉系统,选配了系统硬件;基于作物的蒸腾规律和椰糠基质特性设计了灌溉控制模型,并确定了模型参数。
2)应用本智能灌溉系统在番茄盛果期比荷兰RIDDER公司研制的灌溉系统增加灌溉量9.4%,减少回液量18%,回液电导率(Electrical Conductivity,EC)值比较稳定,有更多的营养液被作物有效利用。本系统比定时灌溉减少灌溉量32%,减少回液量57%。
3)栽培效果显示,使用本系统灌溉的番茄产量、株高、节数与使用RIDDER公司研制的灌溉系统的没有显著差异,取得了与之相同的灌溉效果。
4)在5 000 m2温室,灌溉系统设计使用年限10 a条件下,本智能灌溉系统年均运行费用低于RIDDER公司研制的灌溉系统,节约成本约20.8%。
[1]高丽红. 基质栽培番茄品质调控技术探讨[R]. 北京:中国设施农业产业大会暨高附加价值植物生产的环控技术国际研讨会,2019.
[2]王艳芳,徐进,李新旭,等. 不同椰糠栽培方式对番茄生长发育及水分利用率的影响[J]. 蔬菜,2017(4):72-75.
[3]肖日新,何阳,陈华. 设施智能大棚小果型番茄搁架基质吊蔓栽培关键技术[J]. 长江蔬菜,2018(20):32-34.
[4]祝宁,何秉青,李忠铭,等. 日光温室樱桃番茄椰糠长季节栽培技术[J]. 蔬菜,2020(10):40-42.
[5]Sagar A, Singh P K. Evapotranspiration based micro irrigation scheduling of tomato crop under naturally ventilated polyhouse[J]. Current Journal of Applied Science and Technology, 2019, 36(6): 1-7.
[6]Harmanto, Salokhe V M, Babel M S, et al. Water requirement of drip irrigated tomatoes grown in greenhouse in tropical environment[J]. Agricultural Water Management, 2005, 71(3): 225-242.
[7]Zhou H P, Kang S Z, Tong L, et al. Improved application of the Penman-Monteith model using an enhanced Jarvis model that considers the effects of nitrogen fertilization on canopy resistance[J]. Environmental and Experimental Botany, 2019, 159: 1-12.
[8]徐立鸿,肖康俊,蔚瑞华. 基于温室环境和作物生长的番茄基质栽培灌溉模型[J]. 农业工程学报,2020,36(10):189-196.
Xu Lihong, Xiao Kangjun, Wei Ruihua. Irrigation models for the tomatoes cultivated in organic substrate based on greenhouse environment and crop growth[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(10): 189-196. (in Chinese with English abstract)
[9]Nikolaou G, Neocleous D, Katsoulas N, et al. Irrigation of greenhouse crops[J/OL]. Horticulturae, 2019, 5(1). [2021-01-15]. https: //www. mdpi. com/2311-7524/5/1/7.
[10]龚雪文,刘浩,孙景生,等. 日光温室番茄不同空间尺度蒸散量变化及主控因子分析[J]. 农业工程学报,2017,33(8):166-175.
Gong Xuewen, Liu Hao, Sun Jingsheng, et al. Variation of evapotranspiration in different spatial scales for solar greenhouse tomato and its controlling meteorological factors[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(8): 166-175. (in Chinese with English abstract)
[11]Choi E Y, Seo S K, Choi K Y, et al. Development of a non-drainage hydroponic system with a coconut coir substrate by a frequency domain reflectometry sensor for tomato cultivation[J]. Journal of Plant Nutrition, 2014, 37(5): 748-764.
[12]Choi E Y, Choi K Y, Lee Y B. Non-drainage irrigation scheduling in coir substrate hydroponic system for tomato cultivation by a frequency domain reflectometry sensor[J]. European Journal of Horticultural Science, 2013, 78(3): 132-143.
[13]Choi E Y, Yoon Y H, Choi K Y, et al. Environmentally sustainable production of tomato in a coir substrate hydroponic system using a frequency domain reflectometry sensor[J]. Horticulture, Environment, and Biotechnology, 2015, 56(2): 167-177.
[14]Arguedas F R, Lea-Cox J D, Ristvey A G. Revisiting the measurement of plant available water in soilless substrates[J]. SNA Research Conference, 2007, 52: 111-114.
[15]陈士旺,李莉,杨成飞,等. 基于基质含水率的作物蒸腾量估算与预测模型研究[J]. 农业机械学报,2019,50(增刊1):187-194.
Chen Shiwang, Li Li, Yang Chengfei, et al. Estimation and prediction model of crop transpiration based on matrix moisture content[J]. Transaction of Chinese Society for Agricultural Machinery, 2019, 50(Supp. 1): 187-194. (in Chinese with English abstract)
[16]De Rijck G, Schrevens E, De Baerdemaker J. Thermal conductivity sensing for on-line monitoring and control of the moisture content in rockwool slabs[J]. Scientia Horticulturae, 1998, 74: 307-312.
[17]Dorai M, Papadopoulos A, Gosselin A. Influence of electric conductivity management on greenhouse tomato yield and fruit quality[J]. Agronomie, 2001, 21(4): 367-383.
[18]Mavrogianopoulos G N. Irrigation dose according to substrate characteristics, in hydroponic systems[J]. Open Agriculture, 2016, 1: 1-6.
[19]Katsoulas N, Elvanidi A, Ferentinos K P, et al. Crop reflectance monitoring as a tool for water stress detection in greenhouses: A review[J]. Biosystems Engineering, 2016, 151: 374-398.
[20]Shuto Namba, Junpei Tsuji, Masato Noto. Image-based analysis of water content change in tomato cultivation[C]//2018 IEEE International Conference on Systems, Man, and Cybernetics. Miyazaki: IEEE, 2018.
[21]De Swaef T, Steppe K. Linking stem diameter variations to sap flow, turgor and water potential in tomato[J]. Functional Plant Biology, 2010, 37: 429-438.
[22]李邵,耿伟,薛绪掌,等. 日光温室负压自动灌溉下番茄蒸腾规律研究[J]. 节水灌溉,2008(1):25-28,32.
Li Shao, Geng Wei, Xue Xuzhang, et al. Research on transpiration of tomato under negative pressure automatic irrigation in greenhouse[J]. Water Saving Irrigation, 2008(1): 25-28, 32. (in Chinese with English abstract)
[23]Nikolaou G, Neocleous D, Katsoulas N, et al. Modelling transpiration of soilless greenhouse cucumber and its relationship with leaf temperature in a Mediterranean climate[J]. Emirates Journal Food Agriculture, 2017, 29(12): 911-920.
[24]Nikolaou, G, Neocleous D, Katsoulas N, et al. Dynamic assessment of whitewash shading and evaporative cooling on the greenhouse microclimate and cucumber growth in a Mediterranean climate[J]. Italian Journal of Agrometeorology, 2018(2): 15-26.
[25]魏晓然,程瑞锋,杨其长,等. 辐射累积量控制的灌溉模式下温室番茄生长与水肥利用研究[J]. 中国农业科学,2018,51(18):3531-3541.
Wei Xiaoran, Cheng Ruifeng, Yang Qichang, et al. Research of the irrigation mode controlled by cumulative radiation on tomato growth and water and fertilizer utilization in greenhouse[J]. Scientia Agricultura Sinica, 2018, 51(18): 3531-3541. (in Chinese with English abstract)
[26]Rodriguez-Ortegaa W M, Martineza V, Riveroa R M, et al. Use of a smart irrigation system to study the effects of irrigation management on the agronomic and physiological responses of tomato plants grown under different temperatures regimes[J]. Agricultural Water Management, 2017, 183: 158-168.
[27]Montesano F F, Serio F, Mininni C, et al. Tensiometer-based irrigation management of sub irrigated soilless tomato: Effects of substrate matric potential control on crop performance[J/OL]. Frontiers in Plant Science, 2015, 6. [2021-01-15]. https: //doi. org/10. 3389/fpls. 2015. 01150.
[28]张芳,薛绪掌,张建丰,等. 基于负水头供液决策的温室作物自动灌溉施肥方法[J]. 农业机械学报,2014,45(增刊1):148-154.
Zhang Fang, Xue Xuzhang, Zhang Jianfeng, et al. Automatic irrigation method for greenhouse crops based on negative pressure decision-making[J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(Supp. 1): 148-154. (in Chinese with English abstract)
[29]李银坤,薛绪掌,赵倩,等. 基于负压灌溉系统的温室番茄蒸发蒸腾量自动检测[J]. 农业工程学报,2017,33(10):137-144.
Li Yinkun, Xue Xuzhang, Zhao Qian, et al. Automatic measurement of greenhouse tomato evapotranspiration based on negative pressure irrigation system[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(10): 137-144. (in Chinese with English abstract)
[30]Shin J H, Son J E. Development of a real-time irrigation control system considering transpiration, substrate electrical conductivity, and drainage rate of nutrient solutions in soilless culture of paprika (L. )[J]. European Journal of Horticultural Science, 2015, 80(6): 271-279.
[31]Helmer T, Ehret D L, Bittman S. CropAssist, an automated system for direct measurement of greenhouse tomato growth and water use[J]. Computers and Electronics in Agriculture, 2005, 48: 198-215.
[32]尚超,徐凡,韩莹琰,等. 岩棉营养液栽培条件下温室番茄耗水规律的研究[J]. 中国农业科技导报,2019,21(3):109-117.
Shang Chao, Xu Fan, Han Yingyan. Water requirement rule of tomato in glasshouse under rock wool nutrient solution cultivation system[J]. Journal of Agricultural Science and Technology, 2019, 21(3): 109-117. (in Chinese with English abstract)
[33]Pawlowski A, Sánchez-Molinab J A, Guzmánb J L. Evaluation of event-based irrigation system control scheme for tomato crops in greenhouses[J]. Agricultural Water Management, 2017, 183: 16-25.
[34]罗德尼·汤普森,伊尔斯·德尔库尔,埃尔斯·贝尔克莫斯,等. 欧盟水肥一体化技术[M]. 邹国元,杨俊刚,等译. 北京:中国农业出版社.
[35]石飞,王甲,阮颐. 一种实现无极性RS-485通信的探讨[J]. 集成电路应用,2018,35(6):18-20.
Shi Fei, Wang Jia, Ruan Yi. Research of non-polar RS-485 communication[J]. Application of IC, 2018, 35(6): 18-20. (in Chinese with English abstract).
[36]杨坤. 玻璃温室番茄生产的灌溉策略[J]. 农业工程技术,2018,38(10):37-40.
[37]万书勤,闫振坤,康跃虎,等. 土壤基质势调控对温室滴灌番茄土壤水分分布和产量的影响[J]. 灌溉排水学报,2019,38(5):1-11.
Wan Shuqin, Yan Zhenkun, Kang Yuehu, et al. Using soil matric potential underneath the drip emitter to regulate soil moisture distribution and improve greenhouse tomato production[J]. Journal of Irrigation and Drainage, 2019, 38(5): 1-11. (in Chinese with English abstract).
[38]杨丽,刘海军,高壮壮,等. 温室番茄蒸散量及影响因子研究[J]. 北京师范大学学报:自然科学版,2020,56(2):223-229.
Yang Li, Liu Haijun, Gao Zhuangzhuang, et al. Evapotranspiration and influencing factors of greenhouse tomato[J]. Journal of Beijing Normal University: Natural Science Edition, 2020, 56(2): 223-229. (in Chinese with English abstract)
[39]汤圆强,李涛,王虹云,等. 智能温室番茄栽培管理技术研究进展[J]. 长江蔬菜,2020(22):43-49.
Tang Yuanqiang, Li Tao, Wang Hongyun, et al. Research progress of tomato cultivation and management technology in Heliogreenhouse[J]. Journal of Changjiang Vegetables, 2020(22): 43-49. (in Chinese with English abstract)
Development of transpiration feedback intelligent irrigation system for tomato under coconut coir slabs cultivation condition
Wang Liu, Ding Xiaoming※, Li Kai, Zhang Lingfeng, Pei Qingyu, Yin Yilei, Wang Chunhui, Hou Yong, Pan Shoujiang, Tian Jing, Lu Shaowei
(1.,,,100125,; 2.,,100125,)
To meet the requirements of automatic precision irrigation for tomato cultivation on the coco coir slabs, a transpiration feedback intelligent irrigation system was developed in this study. The system included the substrate water content detection component, the communication component, the decision component, and the irrigation component. The transpiration detection component detected tomato transpiration based on the load cell, the decision component established the precision irrigation control model based on the water holding capacity of coco coir and tomato transpiration, which accurately controlled the pump start-up and turn off, so that the irrigation amount changed with the transpiration rate. The precision irrigation control model had two modes which were normal irrigation mode and flushing mode. When transpiration amount and Electrical Conductivity (EC) value were high, the flushing mode was called, otherwise, the normal irrigation mode was called. The day was divided into four periods. The first period was from sunrise to midday, when the transpiration rate gradually increased, the water content of the substrate should be gradually irrigated to the water holding capacity; the second period was from midday to the end of flushing, when the instantaneous water content of the substrate should be maintained above the water holding capacity to flush the excess salt in the substrate; the third period was from the end of flushing to a moment before sunset, at which time the water content of the substrate should be maintained around the water holding capacity to meet the needs of high transpiration rate in the afternoon, to ensure that there was sufficient water and nutrients to meet the needs of tomato photosynthesis; the fourth period was from the moment before sunset to the second day before the start of irrigation, at which time the water content of the substrate should gradually fall back to the lower limit of the appropriate water content, so that air entered the substrate to ensure the root respiration and normal growth. The second period was the flushing stage, and there was no flushing stage under normal irrigation mode. The water contents in the coco coir slabs were kept at the appropriate range, and a certain irrigation-to-drainage ratio maintained, to benefit the root growth of tomato and absorption of nutrients, and solved the drought stress caused by insufficient irrigation and nutrient waste caused by too much irrigation. The effect of the transpiration feedback intelligent irrigation system was tested, and an irrigation system controlled by light radiation accumulation which was designed by the RIDDER company in the Netherlands was selected as control. The results showed that the irrigation amount of the transpiration feedback irrigation system increased by 9.4% compared with the control, the drainage decreased by 18%, and the drainage EC value was stable. Compared with timed irrigation, the amount of irrigation was reduced by 32% and the amount of drainage was reduced by 57% by using the transpiration feedback irrigation system, and more nutrients were absorbed and utilized by tomatoes. There were no significant differences between the fruit yield, plant height, and node number of the tomato by using the transpiration feedback irrigation system and those by using the irrigation system designed by the RIDDER company. Under the condition of 10 years of the design life of irrigation system in 5 000 m2greenhouse, compared with the application of the irrigation system designed by the RIDDER company, the annualized cost of the intelligent irrigation system designed by this study was 20.8% lower than that by using the irrigation system designed by the RIDDER company. The transpiration feedback intelligent irrigation system could meet the requirements of automatic precision irrigation, and if the irrigation control model might adjust according to the substrate characteristic, the system could also be used for automatic precision irrigation of the Rockwool cultivation, the mixed substrate potted cultivation, and other soilless culture.
irrigation; transpiration; sensors; soilless culture; tomatoes; load cell; coconut coir slabs
王柳,丁小明,李恺,等. 椰糠条栽培番茄的蒸腾反馈智能灌溉系统研制[J]. 农业工程学报,2021,37(8):133-142.doi:10.11975/j.issn.1002-6819.2021.08.015 http://www.tcsae.org
Wang Liu, Ding Xiaoming, Li Kai, et al. Development of transpiration feedback intelligent irrigation system for tomato under coconut coir slabs cultivation condition[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2021, 37(8): 133-142. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2021.08.015 http://www.tcsae.org
2021-01-19
2021-03-19
“十三五”国家重点研发计划“温室智能化精细生产技术与装备研发”(2017YFD0701500);河北省重点研发计划“鲜食型口感番茄绿色生产与品质提升关键技术研究与示范”(20326901D)
王柳,博士,研究方向为设施园艺。Email:wangliu@aape.org.cn
丁小明,研究员,研究方向为温室设施装备研究和标准化。Email:dingxiaoming@aape.org.cn
10.11975/j.issn.1002-6819.2021.08.015
S275.6
A
1002-6819(2021)-08-0133-10
