形态仿生飞行器研制进展及关键技术
2021-06-28沈海军余翼
沈海军,余翼
(同济大学航空航天与力学学院,上海200093)
0 引 言
亿万年来,通过不断的自然选择,自然界生物具备了很多优秀的特性和能力。例如鸟类可以在天空中自由地翱翔,通过翅膀可以精准地控制飞行姿态;飞鱼能够从水下跃出水面,在空中滑翔以躲避天敌等。这些优秀的能力对于人类发明创造具有很高的参考价值。20世纪60年代,美国科学家J.E.Stelle[1]首次提出了仿生学(Bionics)的概念。仿生学是一门致力于从自然生物系统中发现优良的设计、将生物学和科学技术结合在一起的学科。将仿生学应用于飞行器设计上,其主要原理、结构和外形效仿自然界生物的结构,被称作仿生飞行器。通过运用仿生学原理,飞行器能够获得更好的飞行性能,同时自身结构设计得到优化。
仿生飞行器在研制过程中运用到的思路有形态仿生、结构仿生、功能仿生、肌理仿生等[2]。其中形态仿生指从外在形态上对自然界生物进行模仿,以获得良好的气动性能和飞行效率。例如卢吉·科拉尼提出了“流线型概念”[3],为汽车设计、飞行器设计等领域的减阻和降低能耗作出了突出贡献。结构仿生指从内部结构上参考自然界生物,从而获得更好的运动控制能力、具备更好的机动性等。例如设计仿鸟类扑翼飞行器时,对鸟类翅膀上的骨骼和肌肉展开分析并加以模仿,从而得到更贴近鸟类翅膀的扑翼结构[4]。功能仿生指以自然界中生物的一些特殊功能为灵感,将实现这些功能的原理利用到设计的产品中。例如鸮在捕猎过程中飞行噪声非常低,分析这种现象的原理,有助于人们在飞行器降噪、风机叶片与机翼的气动和声学特征的改善等领域有所启发[5-6]。肌理仿生是对生物表面的微观肌理进行研究,从而增强飞行器气动性能,侧重于对表面材料的仿生学探究。例如鲨鱼表皮上覆盖了一层齿状盾鳞,呈沟槽状非光滑表面,可以减小阻力。运-7飞机表层运用了类似的“粗糙”肌理,将阻力减小了5%~8%[7]。
在诸多仿生飞行器研制思路中,形态仿生是最常见的仿生设计形式之一[8]。形态仿生应用在飞行器设计中的主要目的,是通过对飞行器外形的仿生设计,让飞行器本身具备更好的气动性能。在飞行器设计中,气动设计是非常基础和重要的一环,直接影响飞行性能和飞行品质[9]。在飞行器气动外形设计中,主要需要考虑的参数包括升力系数、阻力系数、力矩系数和表面压力分布差等。通过形态仿生技术的运用,飞行器设计人员能够获得大量设计的参照样板,在设计的过程中灵活地借鉴和吸纳,能够降低设计人员的工作量,提高飞行器设计的效率。需要注意的是,在完成设计后,需要对形态仿生飞行器的性能进行校核和验证。一般可以利用实际飞行试验数据或风洞试验、计算流体力学(Computational Fluid Dynamics,简称CFD)仿真试验辨识飞行器气动参数,验证形态仿生设计的先进性和有效性。
本文列举多种现有形态仿生飞行器,介绍常见的形态仿生飞行器的研制思路,基于形态仿生和飞行器设计的角度,探讨形态仿生飞行器的研制进展和所应用的关键技术,并对未来形态仿生飞行器发展方向进行了展望与讨论,为今后同类型飞行器的开发提供参考。
1 形态仿生飞行器研制进展
形态仿生飞行器的研制灵感来自于自然界中生物的优良特性。对于形态仿生设计的过程,R.Neurohr等[10]提出了自上而下和自下而上两种思路,如图1所示,其中“上”代表设计研发层面,“下”代表自然界生物层面。自上而下的思路是先从设计研发中所遇到的具体问题出发,到自然界生物中寻找优良的特征并加以引用。自下而上的思路是先从已知的自然界生物优良特征出发,在技术层面对其原理进行分析并运用到设计研发中。
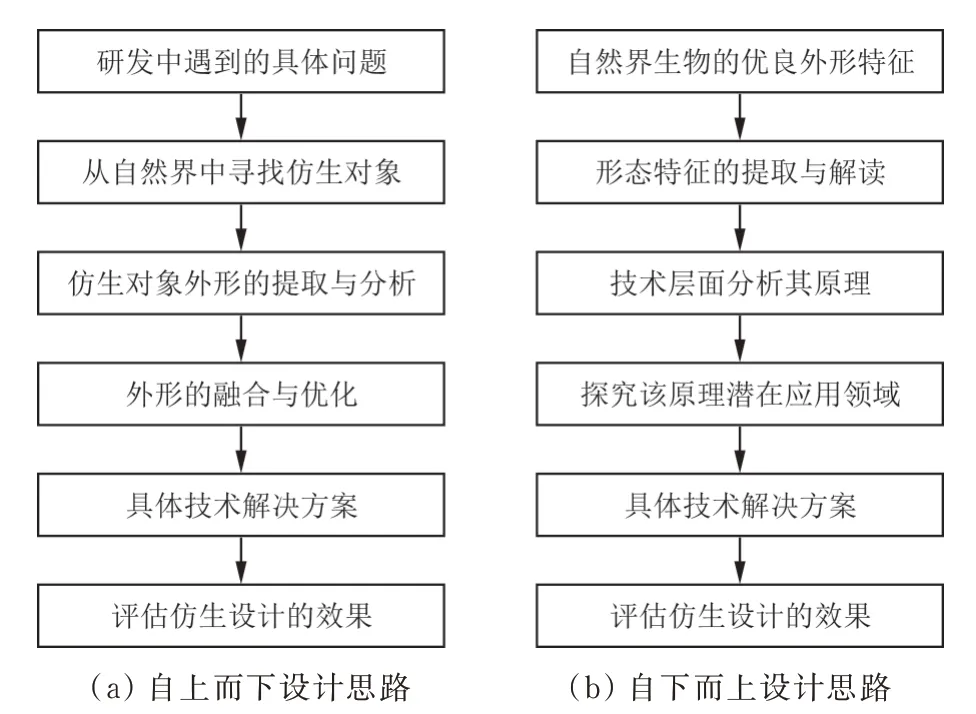
图1 形态仿生两种设计思路Fig.1 Two design ideas of morphological bionics
根据所仿生物种的类别来划分,形态仿生飞行器的种类一般包括仿鸟飞行器、仿鱼飞行器和其他仿生飞行器。本节依据仿生的对象物种类别,介绍当前形态仿生飞行器的研制进展。
1.1 仿鸟飞行器
鸟类具有优异的气动性能,能够在天空中灵活地飞翔,这是人类对鸟类最直观的印象。因此鸟类也成为了形态仿生飞行器最受欢迎的模仿对象之一,这类基于鸟类展开形态仿生设计的飞行器被称作仿鸟飞行器。目前仿鸟飞行器主要研究方向为扑翼式飞行器的研制,通过翅膀的扑动来获取升力和灵活的机动能力。而扑翼机的研制重点主要是对扑翼过程中非定常气动理论研究和对扑翼驱动机构的研究。
相较于传统飞行器的固定翼结构,仿鸟扑翼飞行器在机翼扑动过程中,其周围为非定常流场,因此传统飞行器的一些理论方法无法直接运用到扑翼飞行器上。为了解决扑翼飞行器气动理论研究相关问题,1973年,T.Weis-Fogh[11]提出了扑翼过程中产生高升力的Clap and Fling机制,该理论研究了扑翼扑动过程中两翅中间形成低压腔,将周围空气吸入并在翼尖形成漩涡,这些漩涡能够提供向上的升力,为后续仿生扑翼飞行的理论研究提供了有力支撑;1997年,C.P.Ellington[12]发现了扑翼过程中的“延迟失速效应”,即扑翼扑动过程中前缘涡紧贴翅膀表面产生升力,并随着迎角的增大保持紧贴从而延缓失速的发生;2003年,曾锐等[13]使用非定常涡格法对绿头鸭飞行过程开展分析,得到的结果与鸟类实际飞行状态趋向一致;2014年,付鹏等[14]以斯特劳哈尔数为扑翼非定程度的度量标准开展风洞实验,分析了斯特劳哈尔数对扑翼气动特性的影响,得到了扑翼效率较高的斯特劳哈尔数取值范围;2016年,张红梅等[15]运用数值模拟方法研究了微型扑翼采用仿生“0”字形和“8”字形运动时的气动特性;2019年,蒋进等[16]针对高频扑动微扑翼飞行器开展了多目标优化设计,建立了扑动过程中机翼运动情况和受力情况的数学模型,利用NSGA-Ⅱ算法优化后的模型能够显著降低力的峰值和载荷。
与此同时,对于扑翼驱动机构研究也是仿生扑翼飞行器的热门研究方向。传统扑翼驱动机构中较为常见的为纯机械式扑翼结构,主要可以分为基于直流电机的驱动结构、基于电磁铁的驱动结构和静电扑翼驱动结构三大类,目前应用最为广泛的是基于直流电机驱动的双曲柄双摇杆机构(国外也称前置单曲柄机构)[17]。近年来曲柄滑块式扑翼机构、平面连杆式扑翼机构、空间连杆机构、凸轮机构等类别的扑翼机构也逐渐受到人们的关注。此外,一些新型材料也在驱动机构上得到了应用,例如压电扑翼机构、人工肌肉扑翼驱动结构、柔性驱动机构等,均能不同程度地提高扑翼飞行器的飞行效率。
自古以来,人们对能够在天空中自由飞翔的鸟类充满了美好向往。宋朝张骘的《太平御览·文士传》中就提到了张衡设计制造的一款木鸟,依靠其腹部特殊的控制机构,可滑翔数里(1里=500 m)远[18];公元15世纪,意大利著名设计家和画家达·芬奇通过近20年时间对鸟类的观察分析,设计了由人力驱动的仿鸟扑翼飞行器的手稿[19];1929年,A.M.Lippich[20]设计出了一款人力驱动的仿鸟飞行器,其机翼模仿鸟的翅膀设计,翼展达9 m,每个翅膀的质量4.5 kg,依靠人力挥动来维持滑翔,最远可以滑翔300 m,持续飞翔的性能较弱。由于技术的限制,到20世纪中期以前,仿鸟飞行器更类似与一种滑翔机,效率与鸟类相比相对低下。
现代仿鸟飞行器从20世纪90年代开始逐渐发展,其驱动方式也主要转变为引擎或者电机驱动。1993年,加拿大研究者J.D.DeLaurier等[21]针对扑翼建立了动力学模型并加以演算和实践,首次研制出引擎驱动的仿鸟扑翼飞行器,它由一个燃烧甲醇的引擎驱动,最大功率可达1 hp(1 hp=0.735 k W),起飞质量为3.962 kg,翅膀扑动频率为3~5 Hz时,最快飞行速度可达15.24 m/s。之后各国开始注重提高仿生飞行器的空中飞行效率。2005年美国特拉华大学M.McDonald[22]研制了名为“Sparrow”的扑翼飞行器,其外形模仿小型鸟类的外形,通过扇动翅膀达到向前飞行的目的,其翼展约为15 cm,持续飞行时间为1 min;在此基础上,特拉华大学的S.H.Mcintosh等[23]研制了MHP(Mechanical Hummingbird Project)系列扑翼飞行器,总共有三款型号MHP1、MHP2和MHP3,将蜂鸟的形状抽象出来并加以放大,以获得更好的气动性能,其翼展达到了48 cm,质量只有50 g,翅膀不仅可以上下扑动,还可以改变俯仰角度,飞行灵活性得到了提升。
为了提高仿鸟飞行器的飞行能力,令其更接近所模仿的鸟类,人们在飞行器的形态和结构设计上开展了深入的研究。2012年德国FESTO公司以海鸥为原型,研制出仿鸟扑翼飞行器“Smartbird”[24],它的出现将仿鸟飞行器的研制提升到了一个新的高度,其翼展达到2 m,全身采用碳纤维材料骨架制成,质量只有450 g,在表面加上白色蒙皮以后,形态与海鸥极为相似,在天空中飞翔的时候甚至引来一群真鸟伴飞;同年美国Aero Vironment公司研发出了“蜂鸟”超微型飞行器[25],其翼展为16 cm,质量为10 g,飞行速度最快可达到10 m/s,续航时间可达8 min,“蜂鸟”仿生飞行器模仿蜂鸟的外形和翅膀扇动方式,在飞行过程中的能量转换、气动性能和续航能力方面有了极大的突破;2018年,R.Yudhono等[26]依照一种名叫Accipter Nisus的欧洲雀鹰设计了一款仿鸟无人机,其翼展为74 cm,总质量0.6 kg,该研究者从欧洲雀鹰正常飞行时的正下方拍摄照片,通过该照片获得了轮廓边缘,依据此边缘设计了飞行器的机翼和尾翼的轮廓,并在其基础上加以优化,确定了合适的翼型截面,最终获得了良好的三维气动外形;2019年,Zhang Tao[27]按照悉尼银鸥的外形,设计了一款混合驱动的仿生无人机,翼展为1 m,总质量0.65 kg,其既可以像普通扑翼飞行器那样,通过扑动翅膀来飞行,又可以通过安装在腹部的四个可伸缩旋翼的运转来悬停在空中,机首处还安装了一套可伸缩螺旋桨系统,进一步拓展了驱动的方式,对仿鸟飞行器的设计提供了一种新的思路。
国内在仿鸟飞行器领域的研究也有较大突破。2019年,南京航空航天大学的王鹏程[28]设计了两种扑翼类型的仿鸟飞行器,其质量约为360 g,飞行速度约为3 m/s,续航时间为8 min,实现了机翼在上行程过程折叠以减小阻力,下行程过程展开以增大气动升力的效果,并基于叶素理论方法构造了适用于低频扑翼运动的气动模型,能够直接通过扑动频率、扑动幅度和迎角等参数计算得到升力、阻力和推力,与实验结果较为符合;胡超等[29]、张后伟等[30]以鸟类作为仿生对象开展仿生飞行器的研究,取得了一定进展。以上仿鸟飞行器样机参数及研制思路如表1所示。

表1 仿鸟飞行器样机研究汇总T able 1 Research Summary of bird-like bionic aircraft
1.2 仿鱼飞行器
鱼类能够在水中快速地游动,其身体的外形也同样具有相当优良的流体力学性能。这种优良的外形不仅在水中能够降低它所受到的阻力,将其运用到飞行器外形设计上,同样也可以起到减阻的作用。并且以飞鱼为仿生对象而研制的飞行器,具备开发出跨介质飞行的潜在能力,成为此类仿生飞行器的一大亮点。在仿鱼飞行器设计中,对飞鱼的仿生设计备受关注。飞鱼是一种能在海面上连续滑翔的鱼类,它虽然没有鸟类那样灵活有力的翅膀,但是跃出水面“飞行”起来毫不逊色,较强壮的飞鱼一次可以滑翔180 m,连续滑翔的时间可达43 s,滑翔的距离可以远至400 m[31],堪称大自然的奇观。
早期关于飞鱼的研究主要来自于生物学家实地观测。例如借助频闪摄影技术可以测得飞鱼以接近10 m/s速度快速游到海面附近,胸鳍聚合紧贴身体,以与水面呈30°左右的姿态冲出水面,展开胸鳍开始在水面滑翔,尾鳍仍在水下快速拍打,直至脱离水面自由飞行[31];针对跨介质飞行的过程,Xia Dan等[32]开发出一款机器鱼,并对其跳出水面的过程进行了CFD数值仿真研究,通过求解机器鱼跃出水面的三维动态过程,得到了机器鱼运动学和动力学参数随时间变化的函数关系,并发现提高尾部摆动频率能增加其跳跃高度;H.Park等[33]利用风洞测量出了一种黑翼飞鱼的空气动力学参数,使用聚氨酯泡沫注入真实飞鱼中用以维持身体形状,并将鳍完全展开固定,测得了真实飞鱼的气动参数;F.E.Fish[34]针对33种199只飞鱼样本,开展了基于形态学的空气动力学研究,系统地探究了飞鱼的翼面积、翼展、翼载荷、长宽比与其体型大小之间的关系,并基于飞鱼胸鳍和腹鳍的形状和位置开展了机翼设计,最后将设计出的机翼的飞行性能与其他滑翔机和扑翼机作对比,得出了在高速飞行条件下,基于飞鱼形态设计的机翼具有较高升阻比,空气动力学表现与鸟类滑翔时相类似的结论,为后续基于飞鱼的仿生设计提供了理论和数据支撑。
基于飞鱼的特性,人们也设计出了许多实验样机。2015年,来自富兰克林·W·奥林学院的研究组设计了以飞鱼为原型的仿生飞行器[35],它由尾部推进驱动,通过胸鳍的微小位移来控制飞行的姿态。其外形数据取自于自然界飞鱼真实形态,其框架和支撑件由铝制切片制成,胸鳍和尾鳍由弹簧钢片制成。虽然并没有给出该仿生飞行器的实验数据,但是依据公开的资料,他们首次提出了以飞鱼为原型来设计仿生飞行器。
2011年,麻省理工学院的A.Gao等[36]研制出一款仿生飞鱼两栖飞行器,这是第一款有实验数据支撑的仿生飞鱼飞行器,既可以在水下游动,又可以跨越水面冲入空中滑翔。它的翼展达0.324 m,身长0.25 m,质量约为145 g,其密度与水接近,因此在水中游动时几乎可悬浮在水里。通过对真飞鱼的形态模仿,其成功克服推进功率不足的限制,最快以5 m/s的速度冲出水面,完成跨介质的飞行。
2013年,斯坦福大学(BDML)实验室的A.L.Desbiens等[37-38]发布了一款按照飞鱼为模板设计的无人机,其翼展70 cm,身长30 cm,重约30 g,可以通过一个压紧的弹簧弹射起飞,在距离地面1 m高处可以获得4 m/s的水平速度,最远可滑翔5 m,其滑翔性能在同时期不依靠动力维持推进的仿飞鱼飞行器中是最好的[37]。
2020年,浙江大学邓见等[39]依照飞鱼的气动外形,设计了一款仿生飞鱼跨水气介质的无人平台,其机身长25 cm,翼展0.47 m,排水量0.191 kg。通过流体力学的方法,探究了在水下潜行、水面滑跑和加速起飞整个过程的动力学特性,验证了当输入功率为350 W时,起飞速度可以达到16.5 m/s,以及该气动形态的仿生飞鱼飞行器依靠尾鳍摆动助跑起飞的可行性。
除了以飞鱼为仿生飞行器设计的原型之外,研究者对其他种类的鱼也开展了仿生学设计。例如瑞士洛桑联邦理工学院Smartfish团队以金枪鱼为原型设计的仿金枪鱼概念飞机Tuna Shaped Aircraft[40],其翼展为4.5 m,起飞质量为1 000 kg;国内姜琬等[41]依据旗鱼外形设计了仿旗鱼倾转旋翼飞行器,依据飞鱼外形设计了仿飞鱼可旋转组合式机翼飞行器等。上述研究仍处于概念设计阶段,未深入探究其气动性能和飞行能力,未来仍有待进一步开展研究。仿鱼飞行器样机设计参数及研制思路如表2所示。
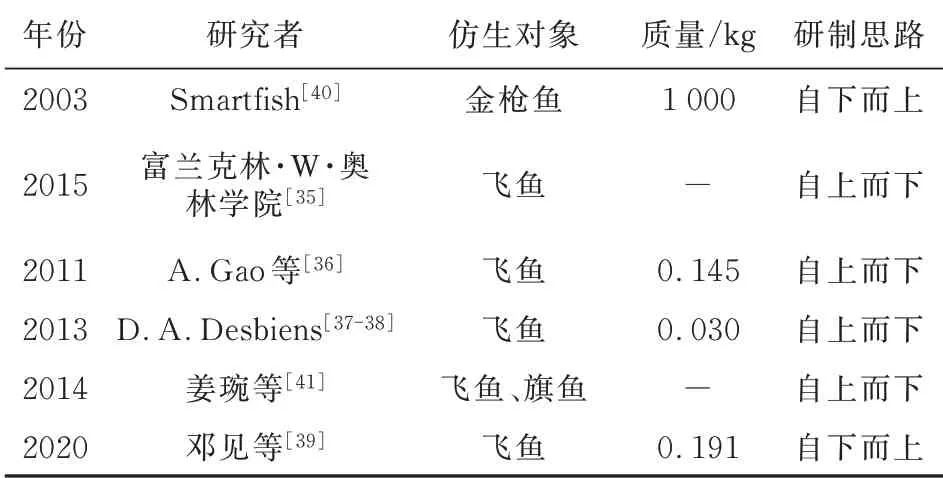
表2 仿鱼飞行器样机研究汇总Table 2 Research summary of fish-like bionic aircraft
1.3 其他仿生飞行器
在自然界中,除了鸟类和鱼类有着良好的气动性能之外,亿万生物中仍然有很多种类在经历了漫长的自然选择后,进化出了优良的气动外形,值得人们开展仿生学研究。这些物种包括种类繁多的昆虫、蝙蝠、水母等,其中最受人们关注的是基于昆虫的仿生飞行器设计。昆虫中有许多种类能够灵活地在空中飞行,它们往往具有较小的体型,却在微小尺度上具备优异的气动特性,为飞行器的仿生设计提供了丰富的素材。
对于绝大部分昆虫,其飞行方式也为扑翼飞行。基于昆虫的仿生飞行器大部分也是扑翼飞行器,这与仿鸟飞行器较为类似,例如同样可以用Clap and Fling等机制解释高升力成因。与仿鸟飞行器不同之处在于仿昆虫飞行器尺度较小,其翼展一般为厘米级。对于微型扑翼飞行器,常用飞行试验研究方法主要包括流场显示和气动力测量等。W.Shyy等[42]研究了低雷诺数下微型扑翼飞行器设计中的关键问题;美国加州大学M.H.Dickinson等[43]使用油罐中悬挂机械翅的方法开展试验,模拟低雷诺数下昆虫飞行状态,得出了昆虫依靠延迟失速、旋转循环、尾流捕获共同产生高升力的结论。
在样机研制方面,2013年哈佛大学K.Y.Ma等[44]以双翅目蜂蝇为原型,研制了一种微型仿昆虫扑翼飞行器,其总质量仅为80 mg,双翅翼展为3 cm,可以提供超过1.3 mN的升力,左右两翅的驱动机构功率为19 mW,但是受到电池技术的限制,它只能够通过尾部连接细导线来获取电力;2017年,该课题组Chen Yufeng等[45]在此基础上加以改进,对微小结构加以优化,双翅翼展为4 cm,质量为0.15 g,升力增加到2.2 mN,可以利用水的张力降落在水面上,并可以通过引燃电解水产生的氢气和氧气,瞬间(1 ms内)获得7.5~9.0 N的推力,达到从水面起飞的目的;此外,Festo的仿生蜻 蜓 飞 行 器[46]、仿 蝴 蝶 飞 行 器eMotionButterflies[47],也是以昆虫作为仿生对象,加以仿生学设计,获得了优秀的气动性能。
同样作为飞行能力优秀的生物,蝙蝠也是很多仿生飞行器的模仿对象。2001年美国加利福利亚工学院和Aero Vironment公司共同研发的“MicroBat”[48],总质量为12.5 g,翼展为0.229 m,能够在空中持续飞行42 s。另外,水母作为一种海洋生物,经历数亿年的繁衍,对能量的利用效率已经到了相当高的水平,同时也具备低雷诺数下优良的气动外形。依据这种特性,很多飞行器也以水母为仿生原型,以浮空飞行器居多。例如2014年纽约大学依据水母的外形,设计了一款浮空扑翼飞行器[49-50],可以通过分布在四周的四个扑翼在空中缓缓移动,能量利用效率非常高;国防科技大学的杨跃能等[51]模仿僧帽水母,优化了一种平流层飞艇的气动外形,将其升阻比提高60%以上。
除了以单种生物为原型进行仿生飞行器设计之外,也有研究者以多种生物为模板,分别取其气动性能优异的外形部分,并将它们结合在一起,设计出了新的仿生飞行器。例如吉林大学鲍杨春[52],分别选取翠鸟的头部和龙虱的身体为形态仿生对象,并将它们结合在一起,设计出一款跨介质航行器,其翼展为1.2 m,质量为12.91 kg,为飞行器减小阻力提供了一种设计方案。以上仿生飞行器样机设计参数及研制思路如表3所示。
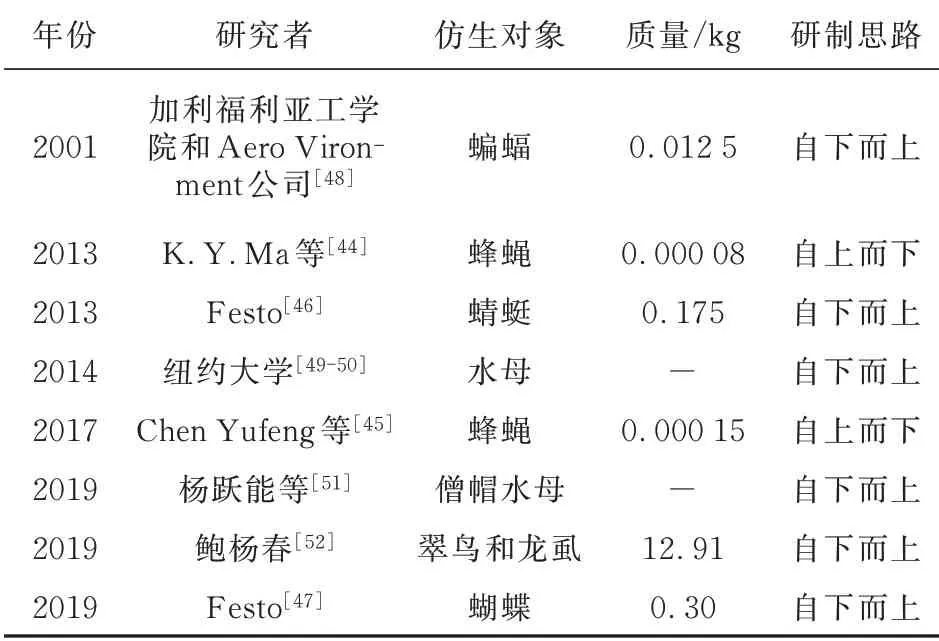
表3 其他形态仿生飞行器样机研究汇总T able 3 Research summary of other bionic aircraft
2 形态仿生飞行器研制中的关键技术
“自下而上”和“自上而下”分别是形态仿生飞行器设计过程中两种思路。本节分别围绕它们展开其相应的关键技术,以及仿生飞行器气动特征的辨识方法。
2.1 “自下而上”——生物形态的提取
形态仿生本质上是对原有生物进行模仿和再设计,它从生物最底层的特征出发,逐渐转化到更上层的仿生飞行器设计。在此过程中,怎样提取原型生物的外形几何特征,是形态仿生过程中至关重要的一步。目前常见的外形几何特征提取方法包括:外形特征的简化,借助生物观测实验系统和逆向工程等。
2.1.1 形态特征的简化
对于外形特征的提取,一种行之有效的方法是对原生物外形进行简化处理。外形特征简化的目的是对生物主要结构特征的提炼和概括[53],通过删去次要的结构特征,保持原有生物形态的固有比例、形状和结构,以减少形态仿生过程中的工作量。例如鹦鹉螺的生长形状可以简化为黄金螺旋线,向日葵种子、松子的排列可简化为斐波那契数列[54]等,如图2所示。在复杂的生物外形立体结构中,最简单、包含形态特征最多的结构是特征线。利用特征线的提取,即可简单还原仿生生物的立体外形。例如王鹏程[28]通过简化鸟类翅膀为简单运动副,设计出四连杆折叠双翼扑动机构,符合真实鸟类拍打情况,从而在下行程完全伸展增大气动力,上行程保持折叠减小阻力,极大地提高扑动效率。
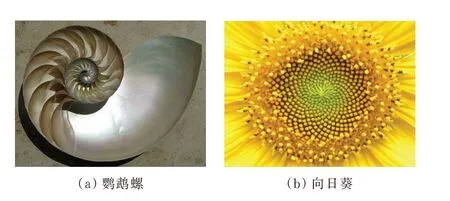
图2 外形特征提取[54]Fig.2 Appearance feature extraction[54]
2.1.2 生物观测实验系统
在形态仿生设计过程中,很多仿生生物原型只有在正常存活的状态下,才具有较好的气动外形。对于这类生物怎样进行外形特征的提取,也是形态仿生过程中的难点之一。为了解决这个问题,可以采用生物观测实验来解决,通过观测生物存活状态下所展现的形态,以完成外形特征的提取。杨跃能等[51]在对平流层飞艇的外形进行仿生学设计时,以僧帽水母为对象,构建了双视角同步成像系统,如图3所示,透明水箱中以45°角斜置一面镜子,利用一台摄影机同时拍摄水母的侧视图和俯视图,通过处理视频图像数据,成功获得了僧帽水母在存活状态下的外形特征。
2.1.3 逆向工程
仿生设计过程中,精确提取原型生物的外形参数对仿生设计极为重要。过去由于技术限制,在三维层面对生物立体形态的构建很难达到较高精度水平。随着技术的不断发展,现代仿生设计借助逆向工程,能够在大部分情况下,获得高精度的外形特征参数。逆向工程一般流程[55]包括:通过扫描设备获取被测生物的点云数据;利用逆向工程软件进行点云预处理,将物体表面光顺化;利用CAD软件进行模型重构;最后进行模型检测,从而完成对仿生对象的高精度还原。在逆向工程技术的帮助下,仿生原型形态特征的获取将变得更简便和精确,能够更灵活地运用在仿生飞行器设计过程中。例如吉林大学鲍杨春[52]利用扫描设备分别逆向得到了翠鸟头部轮廓面和龙虱轮廓面,提取它们的特征轮廓线,加以缩放并组合在一块,得到具有优异跨介质流体动力特性的飞行器外形组合体结构。
2.2 “自上而下”——优化飞行器性能时参考生物形态特征
2.2.1 基于仿生尺度律确定飞行器形态参数
在飞行器设计过程中,当遇到实际问题难以解决时,通过从自然界生物(如鸟类)获取解决问题的方案,即“自上而下”的思路。在仿生飞行器“自上而下”设计过程中,仿生尺度率经验公式是一种可行的技术方案。首先尺度率是指当任意物体尺寸发生变化时,与之相关的物理量和机械参数等会随之发生变化的规律[56]。以仿生扑翼飞行器为例,当飞行器形态或者质量发生变化时,其自身飞行能力、续航能力以及能量利用效率都会随之变化,这种现象又称“尺度效应”。W.Shyy等[57]通过大量研究,最终利用量纲的方法得到各种鸟类的升力、翼面积、翼载荷、展弦比、巡航速度、扑动频率、质量、功率等参数的统计关系,将飞行各个相关物理量结合到一起,通过曲线拟合的方式得到了仿生尺度率经验公式。
利用仿生尺度率经验公式,以及估算出的飞行器质量M,直接推算出飞行器的翼展、翼面积、展弦比、最小功率、最小功率速度等参数的经验值,如表4所示。并依此开展仿生飞行器的设计,以获得更接近鸟类的飞行性能。王鹏程[28]利用仿生尺度率思路设计的仿生扑翼飞行器,经估算其飞行效率可达到鸟类的75%。
2.2.2 基于遗传算法优化仿生飞行器性能
在“自上而下”的思路中,将仿生对象的形态融合至飞行器本身的形态中,并结合飞行器自身特点加以优化,是至关重要的步骤。遗传算法(Genetic Algorithm)作为一种在工程设计和计算中广为运用的优化算法,恰好能够解决仿生飞行器研发过程中的形态融合和优化问题,本文主要针对基本遗传算法开展论述。
遗传算法的产生本身就是仿生的结果,它是基于迭代过程的搜索算法,以达尔文的生物进化过程为准则,实现遗传选择和自然淘汰,遗传操作包括选择、交叉和变异。其核心内容包括参数编码、初始种群的选择、适应度函数的确定、遗传操作、参数控制[58]。在形态仿生飞行器的设计过程中,遗传算法主要用作生成产品的整体轮廓或者形态的关键曲线形状[59]。在对仿生飞行器进行遗传算法优化时,其步骤首先分别扫描飞行器和生物的模型坐标,将各自仿生面分别投影至两个n×n网格中,取每个格点的高度值H n作为染色体母链;然后对母链分别作交叉和变异处理,得到第一子代,用筛选函数对第一子代进行筛选和插值,作为下一子代的亲代染色体链;接下来对变异和交叉法则相关系数以及适应度函数进行修正,进行迭代运算;最后输出优化后的曲面结果,以及分别和原飞行器表面和生物表面的拟合度和适应度函数指标,完成遗传算法优化过程。将所得到的染色体中的格点插值后,即可得到所需要的仿生曲面。在此过程中,筛选函数和适应度函数的选取较为关键。解静等[60]通过对气动力、气动热、容积利用率和稳定性计算和分析,提供了一种确定筛选函数和适应度函数的思路。
2.3 仿生飞行器气动参数的辨识
对于形态仿生飞行器的研制,掌握其空气动力学特性作为关键目标,始终贯穿在整个研制过程中。一个可靠的数学模型能更直观地了解和评判仿生飞行器的性能,并且在飞行控制器的设计中也是不可或缺的。要想得到仿生飞行器的空气动力学特性,最为常用的方法是首先建立飞行器的运动模型和气动模型,然后开展飞行试验,通过实际测量飞行试验数据来辨识气动参数。此外,还可以与CFD气动仿真计算和风洞试验结果互相补充和验证,来得到完整可靠的气动参数。对于气动参数的辨识,已有最小二乘法、极大似然法、频率法、模型估计法、卡尔曼滤波法、生物进化算法等多种常用方法[61]。目前发展方向主要为提高气动参数的辨识精度和收敛速度。
然而对于仿生扑翼飞行器等无法直接通过计算或者风洞得到气动参数的飞行器而言,其气动参数是非线性系统隐式参数,需采用一定优化方法加以计算。浙江大学孙逊莱[61]以仿海鸥多段翼扑翼飞行器为对象,采用刚体非线性微分动力学模型,依据实测飞行数据实现了扑翼类飞行器隐式气动参数辨识。其辨识结果与实际飞行试验数据吻合度高,误差达到5%以下。
3 展 望
仿生学作为一门新兴学科,不断从大自然中汲取优秀的设计理念,为人类所用。而形态仿生飞行器的研制,作为仿生学的一个分支,近年来也取得了比较大的进展。通过对大自然生物形态的模仿和再设计,飞行器能够获得更好的气动性能,在交通运输的节能减排、成本控制等方面有着较好的应用前景。
对于形态仿生飞行器的发展,有以下3个方向。
(1)小型化、微型化发展。随着人类科技水平的逐步提高,形态仿生飞行器也会不断地朝小型化、微型化发展。目前受限于电池技术的发展,许多微型仿生飞行器仍然需要外接导线来获取电力。在今后电池技术取得突破后,这些模仿飞行昆虫的微小飞行器一定会大放光彩,取得长足的发展。
(2)高效化、灵活化发展。目前许多仿生飞行器还是简单地对生物的模仿,其对能量的利用效率并不高,机动能力也较差。今后形态仿生飞行器会朝着能量的利用效率更高的方向发展,同时也能够具备更高的灵活性,更加贴近仿生对象的实际性能,以获得更优秀的仿生学效果。
(3)系统化、规范化发展。目前虽然形态仿生飞行器的发展已取得较大进展,但是其各自所采用的方法种类繁多,还未建立起一个较为完善和系统化的体系。今后随着形态仿生飞行器研究的进一步推进,对于整体的研发会不断朝着规范化和系统化的方向发展,从而让形态仿生飞行器的设计有法可依、有章可循。
4 结束语
本文介绍了形态仿生飞行器的仿生原理和步骤,分析了当前形态仿生飞行器的发展现状,并将形态仿生飞行器按照被仿对象种类分为三个大类别,分别介绍其研制进展,并列举了该类别形态仿生飞行器样机的研发内容和参数。随后分析了在形态仿生中应用到的关键技术,“自下而上”思路中的形态特征提取方法、“自上而下”思路中参考现有生物解决仿生飞行器设计中的问题。之后介绍了仿生飞行器气动参数的辨识方法,讨论了如何辨识非线性系统隐式参数。最后,本文对形态仿生飞行器的未来发展方向进行了分析,得出了将来形态仿生飞行器会往小型化和微型化,高效化和灵活化以及系统化和规范化方向发展的结论。
形态仿生飞行器作为仿生飞行器中一个重要的类别,在今后将持续得到发展和创新。就目前而言,形态仿生的关键在于对目标形态的提取和转化。在形态仿生飞行器研发过程中,随着技术和理念的不断进步,将来会有更加先进的技术出现,让形态仿生的设计更加精确和有效。与此同时,这些技术和理念也会引领飞行器设计理念的更新和优化。两个过程是相辅相成的,最终构成一个完整的闭环。相信在不久的将来,形态仿生技术的研究将会令飞行器的性能发生质的飞跃。
