移动WSNs 中基于跳数矢量的节点定位算法
2021-06-26张焕生崔炳德
张焕生,崔炳德,冯 涛
(河北水利电力学院计算机科学与信息工程学院,河北 沧州 061001)
0 引言
随着电子通信技术的发展,无线传感网络(Wireless Sensor Networks,WSNs)[1-2]已在多个应用中广泛使用。WSNs 是由多个微型、低功耗的传感节点组成,这些传感节点具有数据感知、数据处理和通信能力。传感节点先感知环境数据,再通过多跳通信,将数据传输至基站。
在所有的应用中,收集的所有数据都需依赖于传感节点的准确位置。若数据离开位置信息,该数据可能就无价值。因此,定位成为基于WSNs 应用的关键[3]。
事实上,定位就是估计传感节点的位置。为了估计节点位置,通常先在网络内部署一些已知位置的节点,这些节点也称为锚节点。通过测量锚节点与未知节点间信号参数,估计未知节点位置[4]。
依定位过程中是否需要测距信息,定位算法可分为测距和非测距定位。相比于测距定位,非测距定位简单,易实施。但非测距定位精度劣于测距定位算法。
现存的多数定位算法是针对静态节点,并没有考虑节点的移动性。事实上,节点的移动对节点位置的估计提出了挑战[5-6]。未知节点的移动使节点位置不断变化,提高了对节点位置估计的难度,增加了定位算法的复杂性。此外,WSNs 内的部分节点可能会发布虚假数据,这些虚假数据降低了定位算法的精度。
作为非测距定位算法,DV-Hop 定位避免了额外的硬件开销,得到较广泛应用[7]。DV-Hop 测距算法先估计锚节点与未知节点的跳数,然后再估计网络内的局部平均跳距,最终将跳距与跳数相乘,便可估计锚节点与未知节点的距离。然而,通过跳数估计节点间的欧式距离存在误差,并且跳数的估计值也存在误差。这些误差降低了DV-Hop定位精度。
为此,提出基于跳数矢量的节点定位算法(Hop Vector-based Node Localization Algorithm,HVLA)。HVLA 算法先通过跳数信息构建跳数矢量信息,再利用质心定位算法估计节点位置。同时,通过测量节点间的响应时间,丢弃一些虚假数据,进而提高定位精度。仿真结果表明,提出的HVLA 算法有效地提高了定位精度,并控制了算法的复杂性。
1 系统模型
每个未知节点知晓m 个锚节点的位置信息,并且向基站注册,获取自己的证书。此外,令Tr表示锚节点的传输距离,其随应用场景要求[8]变化。由于网络场景是动态变化,对Tr进行限定,即在最小传输距离和最大传输距离间变化:式中,Random(0,1)表示随机产生0 至1 的函数。

2 HVLA 定位算法
2.1 基于Friis 传播模型的测距
依据Friis 传播模型,利用式(2)计算节点的接收功率Pr:

式中,Pr表示锚节点的天线所接收的功率,Pt表示发射天线的发射功率,Gr和Gt分别表示发射天线增益和接收天线增益[9],为波长,d 表示收发两端间的距离,其可通过接收功率估计发送节点与接收节点间的距离。
当接收到来自未知节点u 的信号,锚节点a 就依式(3)估计离节点u 间的距离:

2.2 控制包的传输
为了收集跳数信息,采用两类控制包:矢量跳数请求包(Vector Hop ReQuest,VHRQ)和矢量跳数响应包(Vector Hop ReSponse,VHRS)。图1 描述了这两个控制包的传输过程。
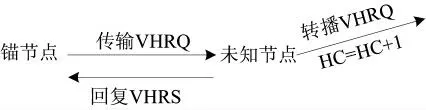
图1 VHRQ 和VHRS 的传输过程
锚节点先向邻居节点广播VHRQ,其携带的信息如式(4)所示:

式中,SADD 表示锚节点的IP 地址,由于节点是移动,锚节点每隔Δt 广播VHRQ 包,ISEQ 表示VHRQ消息的序列号,通过该序列号,保证VHRQ 包的实时性[10]。ISEQ 值越大,表示所接收的VHRQ 消息越新鲜。
HC 表示该VHRQ 包所遍历的跳数。最初,HC=0。一旦收到VHRQ,传感节点就回复VHRS,并将HC 加1。cert 表示节点证书,其有利于判断发布虚假数据的恶意节点。
未知节点一旦收到VHRQ,就回复VHRS,其格式如式(5)所示:

式中,UADD 表示未知节点的IP 地址。
2.3 VHRS 包的筛选
一旦收到所有VHRS 消息,锚节点j 就构建跳数矢量:

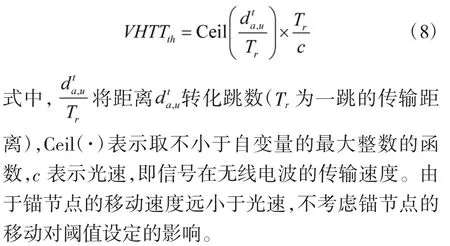
式中,E 为系统测时误差。
如果某个VHRS 包的VHTT 大于阈值VHTTth,则认为发送该VHRS 包的未知节点是不诚实,其发送了虚假数据。因此,锚节点拒绝接收该VHRS 包。
阈值VHTTth的定义如式(8)所示:
2.4 跳数矢量的产生流程
接收到VHRS 包后,就判断VHTT 是否大于VHTTth;若大于VHTTth,就丢弃;否则,就存储该节点的信息。直到接收到所有未知节点发送的VHRS包。整个流程如图2 所示。每个锚节点均依据图2产生自己的跳数矢量。
2.5 定位阶段

式中,α1j表示锚节点j 离第1 个未知节点的跳数,αnj表示锚节点j 离第n 个未知节点的跳数。网络内m 个锚节点就有m 个多项式。通过这些多项式构成m×n 维的跳数矢量矩阵(Hop Vector Matrix,HVM),如式(10)所示:

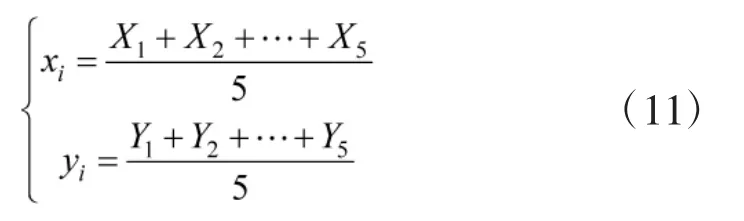
矩阵HVM 中第i 列HVM[;,i]包含第i 个未知节点离m 个锚节点的跳数。一旦构建了HVM,未知节点i 就选择第i 列(HVM[;,i]),然后从HVM[;,i]中选择5 个最小值。这5 个值表示未知节点i离m 个锚节点中最近的5 个锚节点的跳数。随后,依据五边形质心算法估计未知节点的位置。具体过程如下:
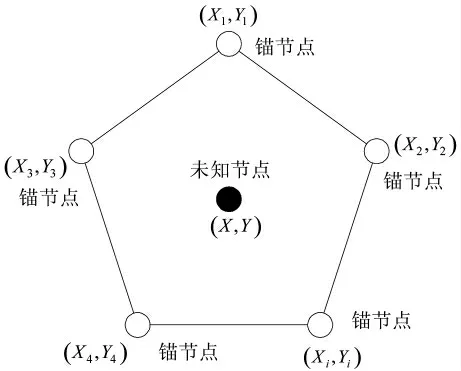
图3 五边形质心定位算法

3 性能分析
3.1 仿真环境
为了更好地分析HVLA 算法的性能,利用NS-2 仿真器建立仿真平台。引用Mica2 作为节点模型。在区域内部署200 个节点,其中,锚节点数为30个、未知节点数为150 个,发布虚假数据的节点(恶意节点)数为20 个,具体的仿真参数如表1 所示。

表1 仿真参数
此外,选择文献[13]提出的安全和强健的DVHop 定位算法(Secure and Robust DV-Hop Localization algorithm,SR-DH),文献[14]提出防御虫洞攻击的安全DV-Hop 定位算法(Securing DV-Hop Localization algorithm against wormhole attacks,S-DH-W)和文献[15]提出的面向虫洞攻击安全DV-Hop 定位算法(Secure DV-Hop localization scheme against wormhole,S-DH-W)作为参照,并分析它们的平均定位误差、定位所消耗时间(平均时延)以及剩余能量率。
式(13)给出了平均定位误差(Average Localization Error,ALE)的定义:

3.2 平均定位误差
首先,分析平均定位误差随未知节点的数变化情况,其中未知节点数从10~150 变化,如图4 所示。

图4 平均定位误差率
从图4 可知,在未知节点数较低时,HVLA 算法的平均定位误差性能与SR-DH-W、S-DH-W 的平均定位误差性能相媲美,并且当未知节点数增加后,HVLA 算法的平均定位误差性最低,且在未知节点数达到100 个后,其平均定位误差性几乎保持常数。在未知节点数从10~150 间变化期间,最小的平均定位误差为5.33%,最大的平均定位误差率达到13.77%。
SR-DH-W 和S-DH-W 算法分别在未知节点达到80 个和60 个后,平均定位误差快速上升。但是,SR-DH-W 算法在未知节点数较少时,其定位性能与HVLA 算法相近。然而,当未知节点数增加后,其定位误差快速增加。
SR-DH 算法的平均定位误差性能随未知节点数的增加而变化的趋势与SR-DH-W 和S-DH-W算法相反。在未知节点数较小时,定位误差较大,但是随着未知节点数的增加,其定位误差逐步减少,原因在于:SR-DH 算法采用反馈机制。未知节点数越多,其反馈的信息越丰富,越有利于降低定位误差。
3.3 平均时延
图5 显示了HVLA 定位算法的平均时延,即估计未知节点位置所消耗的时间。平均时延越低,定位算法复杂度越低,定位性能越好。

图5 平均时延
从图5 可知,相比于SR-DH、SR-DH-W 和S-DH-W 算法,HVLA 定位算法的平均时延约11.474 ms,SR-DH 算法的平均时延最高,达到85.846 ms。这也说明,SR-DH 算法是以复杂度为代价,换取高的定位精度。此外,SR-DH-W 和S-DH-W 算法的平均时延约26.71 ms 和37.52 ms。
3.4 剩余能量率
最后,分析在不同未知节点数环境下的剩余能量率。

图6 剩余能量率
从图6 可知,在未知节点数为10 时,HVLA、SR-DH、SR-DH-W 和S-DH-W 算法均获取最高的剩余能量。然而,随着未知节点数的增加,SR-DH、SR-DH-W 和S-DH-W 算法的剩余能量的下降速度快于HVLA 算法。
未知节点数在15~55 变化期间,SR-DH、SR-DH-W 和S-DH-W 算法的能耗速度加快。相比之下,HVLA 算法的能耗速度在未知节点数的变化期间比较稳定。
4 结论
针对移动WSNs 的节点定位问题,提出了基于网格的DV-Hop 安全定位算法(HVLA)。HVLA 算法引用网格策略,通过锚节点构建跳数矢量,再利用质心定位估计未知节点的位置。同时,丢弃一些虚假数据,进而估计定位精度。仿真结果表明,提出的HVLA 算法提高了定位精度,并降低了定位复杂度。
