婴幼儿髋关节CPM仪的开发与临床应用
2021-06-25陈彪胡大勇王晶晶梁振
陈彪,胡大勇,王晶晶,梁振
1.安徽医科大学 生物医学工程学院,安徽 合肥 230032;2.安徽合肥东南外科医院 小儿骨科,安徽 合肥 230001;3.合肥慧加医疗科技有限公司,安徽 合肥 230001
引言
发育性髋关节发育不良(Developmental Dysplasia of the Hip,DDH)是指在生长发育过程中髋关节结构及功能发育异常,破坏了原有同心圆稳定结构的疾病,一般病征包括髋臼发育不良、股骨头发育不良、髋关节脱位等[1-2]。这对髋关节的后续发育有一定的不良影响,严重时甚至导致终身残疾,该疾病的治疗原则之一是保证治疗过程中髋关节的“同心圆稳定”。
婴幼儿DDH的治疗常采用手术法和保守法。手术法使用截骨手术人为地构建合适的髋关节同心圆结构。Pemberton手术、改良San Diego手术和Salter截骨术均表现出较好的治疗效果[3-4]。但是术后仍需要使用石膏、支具等辅助髋关节固定[5-7]。此外,手术法的创伤较大,会对患儿身心造成一定伤害。
保守法使用石膏、吊带等对髋关节部位长期固定。固定分为静态固定和动态固定,静态固定使用石膏在蛙式位或人字位固定患者,患者髋关节不能运动[8-9]。动态固定使用Pavlik吊带、动态石膏等固定患者,固定后允许患者股骨头在髋臼中小范围运动[9-11]。与静态固定相比,动态固定能抑制或延缓髋关节软骨细胞的凋亡,促进细胞存活,对软骨的发育相对有利,并且具有更好的治疗效果[12-15]。但是动态固定方式多依赖人工,且难以控制运动强度。
持续被动运动(Continuous Passive Motion,CPM)可以增加肌肉活性,防止水肿产生和肌肉萎缩[16-17]。Salter等[18]使用兔子作为实验对象研究了CPM对关节组织的生物学影响,发现CPM可以防止关节粘连,且与固定和间歇主动运动相比,CPM更能促进关节软骨全层缺损的愈合。目前,在手术治疗后,通常使用CPM加快髋关节的康复[19-20]。综上所述,CPM既可以满足髋关节的动态固定,又能实现对患者的运动控制,减少人工依赖[21-22]。但是,尚无髋关节设备能为婴幼儿提供蛙式位或人类位的CPM[23-29]。因此,本论文根据需要设计了一种新型髋关节CPM设备并验证设备对DDH的临床效果。
1 设计目标
根据临床需求和GB 9706.1-2007《医用电气设备第1部分:安全通用要求》、GB 24436-2009《康复训练器械安全通用要求》的规定,制定设计目标,即:① 整机运行噪声数值小于60 dB;② 运动周期为2~198 s,允许偏差值±0.5 s;③ 外壳漏电流与患者漏电流在正常与单一故障状态下均小于0.1 mA;④ 电介质强度在4 kV电压下不发生击穿;⑤ 屈膝角度为90°,允许偏差值±5°;⑥ 髋腿角(冠状面上髋臼中垂线与大腿轴线的夹角)初始角度为90°,运动前后角度差为13°,允许偏差值±5°。
2 方法
2.1 系统设计
为了实现蛙式位的CPM,本文设计的CPM设备分为两个部分,主机和活动支架如图1所示。主机利用高压气体驱动活动支架在蛙式位下运动,从而带动患儿髋关节的CPM。活动支架是改良蛙式支架,源自保守治疗中的蛙式支具,既满足髋关节同心圆结构,又可以实现髋臼与股骨头的相对旋转。
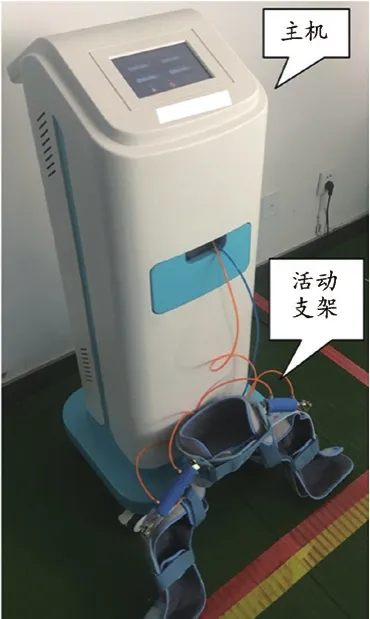
图1 设备外观
2.2 主机系统
主机系统包括电气通路与气流通路。电气通路完成气压监控、人机交互、逻辑运算和输出控制信号等功能。气流通路接受电气通路控制,实现气压有无、气压强度、气压方向的控制。
电气通路如图2所示,主控模块根据气压传感器和触摸屏的数据,通过三极管开关电路对两个电磁阀进行控制。如图3所示,人机交互界面在电阻触摸屏上呈现。“气压值”为当前的工作气压数值,此数值可通过气流通路进行调整;“气压限定值”为允许输入气压的最大值,设定范围为0~500 kPa。当前工作气压值若超过气压限定值会产生声光报警,并立即停止驱动活动支架,能够有效避免气压过高给患儿带来意外损伤。若当前工作气压值低于100 kPa,由于压力过小无法驱动支架运动,进而停止驱动并发出报警。“上行时间”与“下行时间”是两个倒计时器,上行时间倒计时结束,气动执行器收缩,带动髋关节完成屈曲动作。下行时间倒计时结束,气动执行器伸出,带动髋关节完成伸展动作。

图2 电气通路

图3 人机交互界面
如图4所示,气流通路的各个元件之间通过气管连接。外部供气源的气流经过气压调压阀,调节至合适的气压强度,而后通过开关电磁阀,再进入工作电磁阀。开关电磁阀控制通断,即控制气流的有无。导通时气流能够顺利通过,设备正常运行,不导通则切断气流,运动停止。工作电磁阀能够控制气流的方向。给工作电磁阀施加高电平时,气流正向流动;低电平则气流反向流动。控制后的气流,通过气管输送至活动支架。
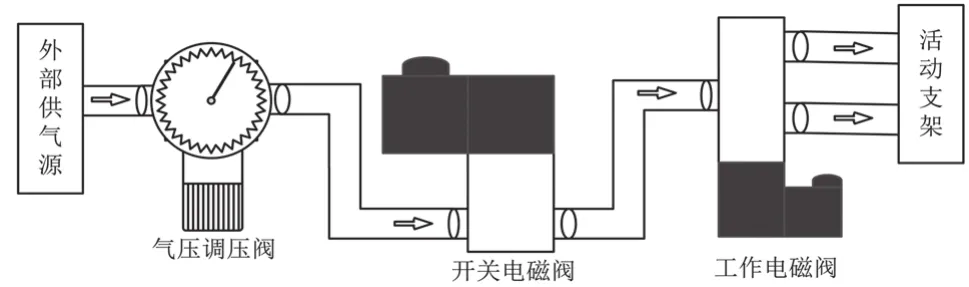
图4 气流通路
2.3 活动支架
如图5所示,所涉及的活动支架是将传统蛙式支具的腰部与腿部分离,并采用气动执行器连接。外部输入的气流先后经开关电磁阀、工作电磁阀,至气动执行器。气动执行器在气压作用下伸缩运动,从而穿戴活动支架的患儿髋关节能实现CPM,即股骨头与髋臼发生相对转动。图5所示的L形连接架用于测量转动角度,穿戴前需去除。

图5 活动支架
2.4 髋关节相对转动角度
髋关节的相对转动角度是DDH治疗的一个关键参数,却难以直接测量。因此,本文采用间接方法对其测量。图6为初始状态下髋关节结构图,此时气动执行器处于收缩状态,显然可知∠ABC=90°。从气动执行器与腰部固定架的连接处作水平线H线;过髋臼中心做一条垂线为Y线,与H线的交点即为A点;再从大腿骨起始端C点,沿大腿骨做一条直线Z线,与Y线的交点为B点。之后,沿股骨颈方向做一条直线,与Y线的交点为D点,与Z线的交点为E点,再过E点作垂线作为辅助线。以同样的方式绘出气动执行器伸出时的结构图,图7是这两种状态下的辅助计算图。
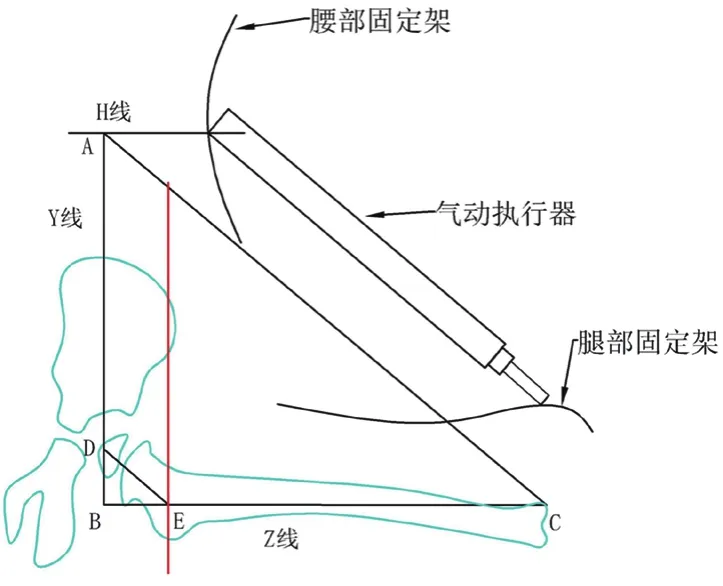
图6 初始状态下髋关节结构
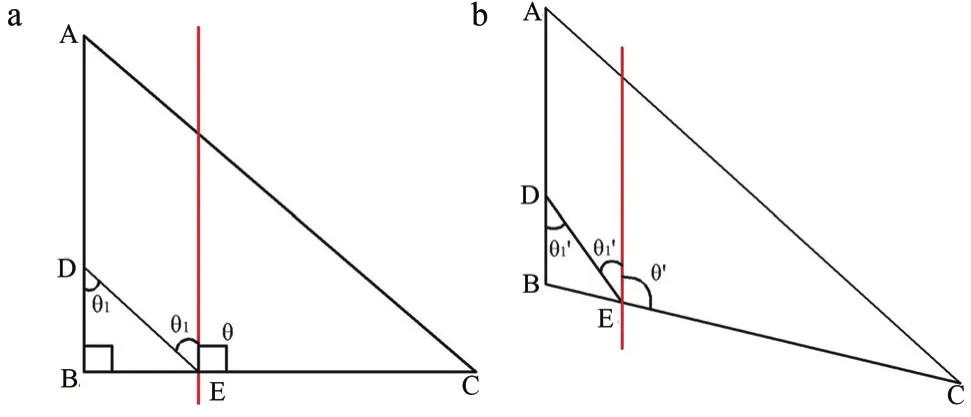
图7 辅助计算图
由图7可知,∠DEC是股骨颈干角,其大小固定不变,θ1与θ1'的差值反映了运动过程中股骨头与髋臼的相对转动角度,并有公式(1)~(2)。

通过公式(3)求得运动过程中股骨头与髋臼的相对转动角度。

通过计算,在CPM过程中,髋臼与股骨头发生相对转动,且转动角度等于θ'-θ。由于θ'与θ可视为冠状面上髋臼中垂线与大腿轴线的夹角-髋腿角,则θ'-θ为髋腿角运动前后的角度差,因而测量该角度差即可得到髋关节相对转动角度。根据设定目标,髋腿角运动前后角度差为13°,则髋关节相对转动角度应为13°。
2.5 参数测量
2.5.1 噪声测量
由于本设备采用电磁阀来控制支具运动,尽管选用低噪声电磁阀,仍需要对噪声进行测量与控制。电磁阀上安装消音器,可显著减小噪声。此外在设备周围1 m的位置,测量设备产生的噪声。在设备的3点、6点、9点、12点方向各测量6次,测得的噪声分别为:(56.42±1.19)、(55.87±0.93)、(57.50±0.73) 和(57.20±0.57)dB,达到设计预期且符合GB 24436-2009《康复训练器械 安全通用要求》对康复医疗器械的要求。
2.5.2 运动周期测量
设备运动周期由一个“上行时间”和一个“下行时间”构成。分别将“上行时间”“下行时间”设定在1、50和99 s,使用精密秒表各测量20次取平均值。如表1所示,在设定为1、50和99 s时测量结果分别为上行时间:(1.01±0.11)、(50.04±0.31)和(99.02±0.20)s;下行时间:(1.00±0.10)、(50.04±0.12)和(99.06±0.11)s。测量表明:设备运动周期为2.01~198.08 s,误差小于0.5 s,参数满足设计要求。

表1 上/下行时间
2.5.3 安全性能测量
电气安全是有源医疗器械安全性的核心观测点之一。因此,本设备按照GB 9706.1-2007《医用电气设备第1部分:安全通用要求》对设备的电气安全进行全方位地检测。实验使用常州蓝光电子公司的LK2680C医用泄漏测试仪测量外壳漏电流和患者漏电流,使用常州蓝光电子公司的LK2680A医用耐电压测试仪测量电介质强度,两个仪器的测量精度可达千分位。各参数测量6次取平均值,以Mean± SD表示。测量结果如表2所示,漏电流均小于0.1 mA,电介质强度在施加4 kV电压时电流为0.12 mA,未发生击穿,各参数满足设计目标和GB 9706.1-2007《医用电气设备第1部分:安全通用要求》的要求。

表2 安全性能
2.5.4 角度测量
使用校准后的量角器测量屈膝角度和髋腿角的初始角度,每个参数测量6次取平均值。为了更为准确的测量髋腿角运动前后角度差,我们使用MPU9250角度传感器系统测量该角度差,每500 ms采集一次数据并储存。设定“下行时间”和“上行时间”均为13 s,“气压限定值”为350 kPa。读取运动前后的欧拉角数据,并求出差值,再使用ZYX旋转矩阵法(右手坐标系、内旋)和向量坐标法得到髋腿角运动前后角度差。角度传感器至少读取40个周期,取平均值作为最终数据。
表3是角度测量表,结果显示屈膝角度(n=6)为左(89.67±0.52) °、右(90.33±0.52) °。初始角度(n=6)为左(90.33±0.52)°、右(90.67±0.82)°。髋腿角运动前后角度差(n=41)为左(13.01±0.169)°、右(13.13±0.125)°。结果显示角度参数均符合设计目标。

表3 角度测量
3 临床应用结果
为验证设备在临床使用时的有效性,在取得医疗器械注册证后进行了临床验证并统计治疗效果。收集在安徽合肥东南外科医院使用本设备进行治疗的DDH患儿资料。所有患儿首先进行骨盆CR检查,之后行手法闭合复位和支架外固定术。患儿穿戴活动支架前,均去除了L形连接架。术后第2天,启动设备进行髋关节运动康复。依据患者体重和病情,设定工作压力200~350 kPa和运动频率[0.1~0.33 Hz (10~30 s)],保持每天治疗在23 h以上,设备治疗期间根据情况调整设备频率和气压。所有患儿家属均知情同意。
得到病例29例(41髋),男8例,女21例,平均年龄(18.24±6.91)月,平均治疗时间(2.10±1.74)月。AI与髂骨角能够反应髋关节髋臼的发育程度,故而测量了治疗前后的AI与髂骨角,以观察髋臼变化。测量结果如图8所示,参数以均值±标准差的形式表示,AI从34.5±1.0下降至30.1±1.0;髂骨角治疗前为(50.2±1.2)°,治疗后为(52.4±1.3)°,差异均具有显著统计学意义(P<0.01)。
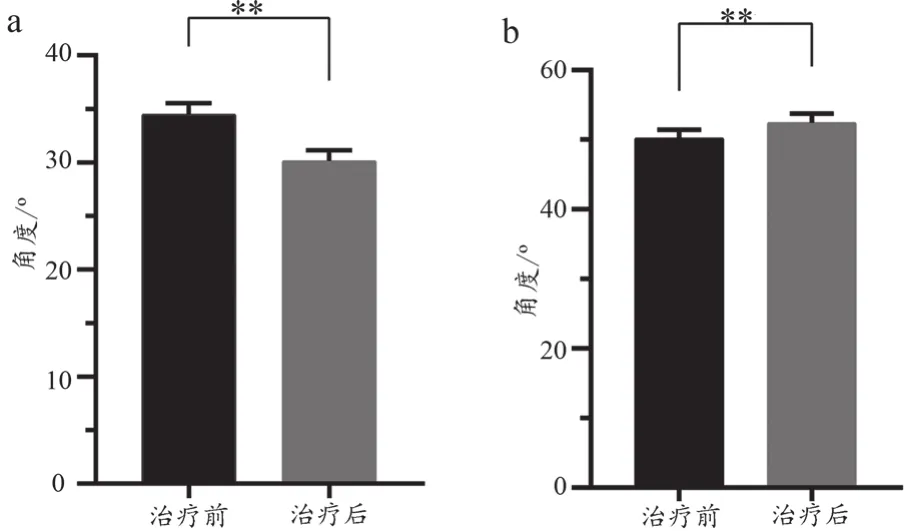
图8 参数变化
4 讨论
本文设计了一种新型髋关节CPM设备,能够实现婴幼儿蛙式位下的CPM。为了验证设备的性能,对其噪声、运动周期、安全性参数、角度参数进行了测量。结果显示设备运行时噪声均小于60 dB、运动周期误差在0.5 s以内。漏电流均小于0.1 mA、电介质强度可耐受4 kV电压,具有较好的电气安全性。角度参数测量表明,本设备可令婴幼儿髋臼与股骨头具有13°的相对转动角度。在使用设备治疗后,患者AI减小了4.4,髂骨角增加了2.2。
髋关节CPM设备属于常见的康复治疗设备。Guzmán-Valdivia等[22]设计的髋关节CPM设备以靴子作为下肢驱动部件,实现成人在仰卧位下髋关节的外展/内收、屈/伸动作。Wu等[28]提出了一种3自由度下肢康复机器人,可以帮助患者进行髋关节、膝关节、踝关节的康复训练。但是,现有的设备均无法提供蛙式体位的CPM,且不存在针对婴幼儿的专用方案。本研究设计的髋关节CPM设备,运动体位源自DDH保守法治疗,适用于婴幼儿DDH治疗;活动支架由蛙式支架改良而来,既满足髋关节同心圆结构,又可实现髋臼与股骨头的相对旋转。
李刚等[30]对100髋进行三期支架固定治疗和一期康复训练,3个月后发现AI从37.2下降至33.9,下降速率1.1/月。张宗武等[31]采用连衣兜裤和固定支架对78髋进行治疗,治疗2个月后AI从33.8下降至30.3,下降速率1.8/月。刘雁寒等[15]分析了19髋使用动态石膏治疗的效果,治疗3个月后AI从34.47下降至27.9,下降速率2.19/月。使用本文描述的CPM设备治疗了41髋,治疗2个月后AI从34.5下降至30.1,下降速率2.2/月。由此可见,本文设计的CPM设备对于DDH有显著积极的治疗作用,且相比于固定治疗,具有更快的AI下降速率。虽然本文统计的AI下降速率与报道的动态石膏的速率相似,但是CPM的方式具有减少人工、有效控制运动强度的优点。
本文设计的设备也存在以下局限性:① 气压制动的方式虽然增加了安全性,同时也相应提高了对外部供气源的依赖性;② 活动支架的适应性有限,在保障性能稳定的基础上,将其升级成尺寸可调节形式,可能是解决此问题的关键。未来的工作是解决这些问题,并新增治疗数据采集与存储的功能,为今后的深入研究提供必要支持。
5 结论
本文设计的一种婴幼儿髋关节CPM设备,可以使患儿在蛙式位下CPM。经测量,本设备达到了设计目标,具有良好的电气安全性,可令婴幼儿髋臼与股骨头具有13°的相对转动角度。临床结果表明本设备对婴幼儿DDH具有积极的治疗效果,为婴幼儿DDH的治疗提供了一种新思路。
