基于高光谱的低对比度伤员目标搜寻技术研究
2021-06-25朱明明尚丹婷曹育森雷涛夏娟娟李钊景裕张林媛王健琪路国华
朱明明,尚丹婷,曹育森,雷涛,夏娟娟,李钊,景裕,张林媛,王健琪,路国华
1.空军军医大学 军事生物医学工程学系,陕西 西安 710032;2.西宁联勤保障中心药品仪器监督检验站,甘肃 兰州 730050;3.空军军医大学唐都医院 放射科,陕西 西安 710038
引言
伤员搜救是以人为本的重要体现,能够反映一个国家综合实力[1]。快速有效地搜寻伤员也是降低失踪、死亡率的首要因素。从技术发展特征和使用方式来看,伤员搜寻技术可分为接触式和非接触式。现有接触式救生装备主要存在穿戴装置使用不方便,增加身体负荷等影响[2-4]。而且自然灾害等事故发生都具有突发性、紧迫性、不可预知性等,伤员不可能在事故发生前随时随地随身携带救生设备,且事故发生时伤员陷入昏迷无法触发设备或者救生设备受到损坏、通讯信号质量不佳等都将为救援工作带来未知因素。而非接触式搜寻技术主要利用人体生命特征进行搜索,无需穿戴任何装备从而避免了以上问题。目前国内外非接触式搜寻技术可分为声学、光学、气味、微波信号等技术[5],其中应该最广泛的就是光学信号,采用无人机搭载高清相机和热红外成像仪进行低空搜寻[6-8],但当伤员处于低对比度环境中,即伤员衣着颜色与背景颜色相近时,依靠机载视觉载荷很难发现伤员。高光谱目标识别技术,具有抗伪装、抗干扰等优点[9],在低对比度环境下搜寻伤员具有其独特的优势。
高光谱技术将成像信息从可见光拓展到400~1000 nm波段,利用先验知识分析已知的波谱曲线,通过对比高光谱图像中每个像素波谱与已知波谱的匹配程度进行识别分类。目前高光谱成像技术已广泛应用于农业、林业、生态环保等领域,利用小型无人机搭载高光谱相机进行低空巡航可实现小尺度高精度遥感监测。其主要原理是根据植被中叶绿素、水分等含量不同影响冠层群体的反射光谱变化,从而反演出区域内植被的长势、病虫害、水分胁迫状况等[10]。高光谱技术能够有效识别“同色异谱”的目标,王博等[11]研究发现高光谱可快速有效地识别传统可见光图像无法识别的伪装目标;徐文斌等[12]综合目标的光谱、强度、偏振态等参数,提高了目标的探测识别能力;严阳等[13]利用在可见光及近红外波段下获取的高光谱图像,分析了伪装目标在不同背景下的伪装效果,目前尚未发现高光谱应用于伤员搜寻的研究。因此,本文提出一种无人机搭载高光谱的战场伤员识别方案,进行相关实验讨论其可行性和优缺点。
1 材料与方法
1.1 实验设备
本次实验采用的高光谱成像系统是由大疆M600六旋翼无人机、HY-1010高光谱成像仪、地面控制系统、稳定云台、标准反射率板等组成,详见图1。① HY-1010高光谱相机[奥谱天成(厦门)科技有限公司]入射端采用狭缝设计,波段范围400~1000 nm,共300个通道,1920X1080像素CCD探测器,高光谱分辨小于2.6 nm,为后续实验分析提供数据支撑;② M600六旋翼无人机(大疆DJI Matrice 600),可搭载5.5 kg载荷飞行18 min;最大航行速度65 km/h,悬停精度垂直方向0.5 m、水平方向1.5 m,最大通信距离5 km。

图1 高光谱数据采集设备
1.2 实验设计
为方便数据采集、简化实验模型,实验设定为草地环境下对迷彩伤员的识别,实验背景为学校操场足球场,实验目标为迷彩服上的血迹。实验设计如图2所示,首先,将6套带有血迹的迷彩服随机铺设在足球场中,球场中有大量身着迷彩服运动人员。使用M600无人机搭载HY-1010高光谱相机规划好航线进行遥感数据采集,对采集图像进行裁剪、几何校正等预处理,提取目标波谱和背景波谱,然后对预处理图像进行最小噪声分离变换(Minimum Noise Fraction,MNF),此次实验采用混合调谐匹配滤波(Mixture Tuned Matched Filtering,MTMF)、最小能量约束(Constrained Energy Minimization,CEM)、自适应一致估计(Adaptive Coherence Estimator,ACE)三种波谱分析方法进行分析[14],对分析结果进行滤波后处理后输出结果。使用MTMF进行匹配滤波时,目标波谱对比每个像元的MF匹配图像以及相应的不可行性图像,用于减少识别目标的假阳性。CEM使用有限脉冲响应线性滤波器(Finite Impulse Response,FIR)和约束条件,最小化平均输出能量,以抑制图像中的噪声和非目标波谱信号[15]。首先对高光谱图像进行预处理,得到二维化和归一化后的数据r(L*N),L为波段数,N为像素数。根据图像数据r,求得图像的自相关矩阵:,然后确定目标光谱向量d,根据公式设计FIR线性滤波器:w=[w1,w2,…,wL]T,将归一化后的数据经过FIR滤波器滤波,得到输出信号y,即为检测结果。ACE是由广义似然比检验推出,其中r是高光谱影像的像元光谱向量,d是目标信号,Γ是背景协方差阵[16]。当r与d相似度达到最大时,此时的eACE即为最终检测结果。比对三种分析方法,对识别结果进行客观评价。
1.3 研究方法
1.3.1 硬件连接
此机载光谱系统集成了数据存储、电池仓、云台、高清相机等模块,主要实现数据的存储拷贝、参数设置等功能。将数传天线插在机载光谱系统的接口上,调整天线方向朝下。在机翼支架上安装2个RTK定位模块,实现高精度的GPS测量。从M600的图传信号引出一条HDMI线与机载光谱系统连接,由此通道可实时传输机载光谱系统的画面,如图3所示完成硬件连接。

图3 机载光谱系统硬件连接示意图
架设并配置地面站,将地面站设备安装在地面站三脚架上,使用网线连接地面站登录网页169.254.1.0配置接收器,在receiver-position-base setup中获取地面站当前位置,采用GPS的载波相位观测量,给出无人机的三维坐标,并生成GPGGA定位信息[17]。在设备管理中通过蓝牙连接地面站,连接成功后可自动获取高光谱相机状态、空间维光谱信息、积分时间、RX0存储模式、RTK状态、GPS搜星数等信息。
1.3.2 多光谱遥感图像采集
选择晴朗微风天气,在学校足球场进行测试,测区面积为90 m×120 m,以黄绿相间草地为主,在草地上铺设迷彩服喷洒仿真血伪装成伤员。将反射率板铺设在作业范围内,根据照度值,计算合适的积分时间,进行飞行前系统设置。M600六旋翼无人机飞行高度100 m、镜头焦距35 mm、缝隙25 μm,此时多光谱相机MS600地面分辨率为8.7 cm。为方便拼接,设置重叠率为80%,航带间距22 m、飞行速度4.4 m/s,进行航线规划。本次实验共分为5组飞行,每组随机改变伤员位置分布。
1.3.3 数据预处理
每组飞行时长约5 min,高光谱数据为480×13643×300,数据容量达4.8 G,飞行航迹中转弯部分数据变形不能使用,需进行图像预处理。一般的遥感图像处理顺序为图像几何校正-图像融合-图像镶嵌-图像裁剪,本次实验场地较小,单幅图像就可包含所有的实验对象,且操场中存在大量运动中的人员,在不同时刻所处位置不同,为图像的镶嵌带来不利因素,因此直接进行图像裁剪即可获得所需数据(图4),裁剪后图像数据为405×988×300,数据容量300 M。

图4 预处理图像
对图像进行预处理之后,提取目标波谱与背景波谱,每个分类选取100以上的像素点,统计分析光谱曲线如图5所示,各类地物波谱差异较大,可使用波谱识别的方法进行目标识别。首先因高光谱数据量较大,需进行数据降维以减少后处理的计算量,常见的方法有主成分分析法(Principal Component Analysis,PCA),本次实验采用基于PCA提出的MNF变换,具有PCA正交变换的性质,变换后得到的向量中的各元素互不相关,各分量按照信噪比从大到小排列,从而达到降噪降维的目的[18]。
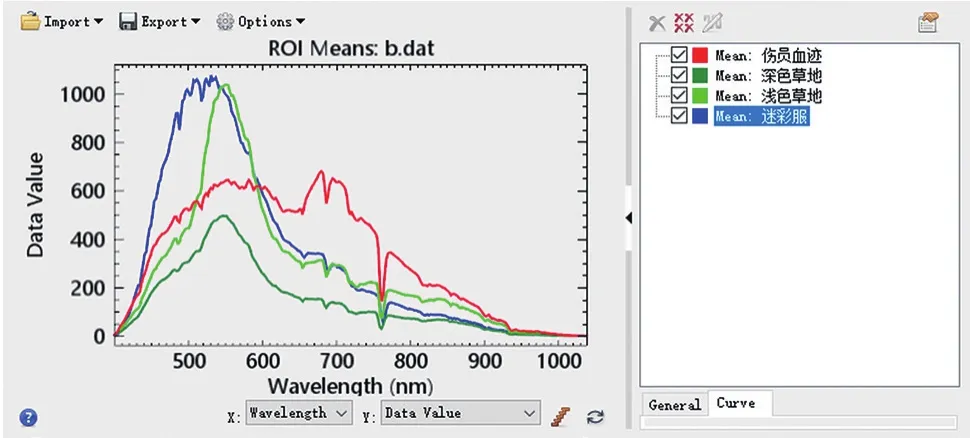
图5 光谱分析图
2 数据处理结果
对于ACE、CEM识别结果是目标波谱对比每个像元的灰度图像,可手动修改阈值,调整识别结果。为了更加客观的对比识别结果,尽可能减少人为干预因素,此处均选择系统默认阈值。MTMF通过点云图选择进行识别,横坐标表示像元与目标波谱的匹配度MF Scores,纵坐标表示不可行性值In-feasibility Value,用二维散点图识别具有不可行性低、匹配滤波值高的像元,也就是散点图中选择距离右下角最近的点,将点数控制在与目标像元相近的数量,方便统计结果,点云选择如图6所示。

图6 MTMF点云图选择
得到初步识别结果后,进行卷积滤波和最小聚类方法去除结果中孤立的小斑点,减少误识别。最终识别结果如图7所示,图中红色像素为识别目标,可以较为清晰地看出6名伪装伤员的轮廓。统计分析5组实验像素识别结果如表1所示,,分别计算5组实验识别结果的正确率和无人率,统计量均值作为最终结果。

表1 识别结果统计分析表
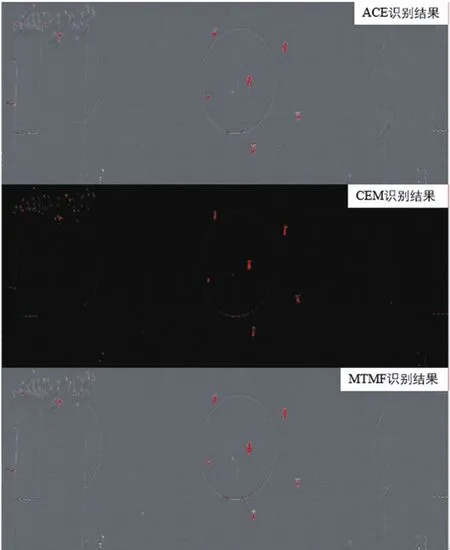
图7 三种方法识别结果图
3 讨论与结论
本文采用仿真血喷涂迷彩服的方式模拟低对比度环境下伤员,利用小型无人机搭载高光谱相机采集遥感图像,使用常用的三种光谱分析方法进行伤员识别,从实验结果可以看出三种方法均可清晰识别出伤员的轮廓,进一步进行像素级统计分析后发现三种识别方法中ACE误分率最低53.2%,CEM正确率最高50%。结果中的误识别主要是由于混合像元和异物同谱的现象造成。通过比对识别结果图与实际高清照片,发现未识别出的目标像素点主要集中在血迹边沿位置,也就是混合像元未能识别。由于高光谱分辨率较低,此次实验中地面分辨率为8.7 cm/pixel,也就是每个像素点为8.7 cm的小方块,在血迹边沿位置的像素点中除血迹外还包含草地、迷彩服等物质,形成混合像元。高光谱进行目标识别的基本原理是计算未知地物光谱曲线与已知物体的光谱曲线相似度,根据相似程度设定相应阈值对地物进行识别分类。在提取目标波谱时选定的像素点均为纯净像元,当混合像元中血迹占比较小时与目标波谱差异较大,因此在阈值设定较小时未能识别出目标混合像元。此外,还与血迹的特性有关,血迹是半透明物体,与不同地物混合及干湿程度的变化,都会影响光谱特性的变化。而在统计目标像素个数时将所有含有血迹的像元均纳入了目标像素,导致识别正确率较低。虽然血迹边沿未能识别,导致血迹面积变小且边沿呈锯齿状,但是整体血迹轮廓依然能够清晰辨识。
目前基于无人机的伤员搜救技术,主要采用人体视觉和红外视觉的方法,使用HOG+SVM目标检测算法识别人体轮廓。此类方法需要大量的先验数据进行训练,为了确保足够的分辨率无人机飞行高度受限(一般不超过50 m),且在人员被部分遮挡时识别率大大降低。本次实验直接对血迹进行检测,结果表明高光谱在伤员识别应用中具有可行性,可达到像素级识别(识别精度还有待提高)。在本次实验中发现,高光谱数据量巨大且数据冗余度较高,后期数据处理工作量太大,很难进行实时传输计算。在下一步工作中将通过波段选择的方法,将能够有效识别伤员的光谱信息集中在有限的波段中,缩小数据运算量。目前高光谱识别方法仅仅利用了光谱维信息,而忽略空间维信息,无法排除异物同谱的干扰。下一步将结合目标的纹理等信息优化现有算法,提出适用于伤员识别的模型。
