基于PLC的多轴同步控制系统研究
2021-06-25孙文慧
孙文慧
(天津水科机电有限公司,天津 301900)
0 概述
随着现代制造业的迅猛发展,在同一控制系统中,如:数控机床,机器人,印刷机械等很多应用场合都会需要实现多轴同步控制,且对控制的实时性、控制精度要求也越来越高。
目前多轴同步控制已经从传统的机械共轴传动、机械传动链传动实现向无轴传动方式的转变。无轴传动又称为虚拟电子轴、电子齿轮传动,是将机械传动比转化为电子比,通过运算直接将运动控制信号发送给带动执行机构的电机,完成精确的运动控制。
本文以三轴线速度同步运动控制为例,对基于PLC的多轴同步控制系统进行研究。
1 基于PLC的多轴同步控制系统构建
1.1 方案1:编码器+PLC+伺服电机控制方式
1.1.1 系统工作原理
这种方式的原理如图1所示,PLC通过控制变频电机(或其他可调速电机)带动轴1作为速度基准轴运行,同时利用编码器将轴1的运动状态实时反馈至PLC高速脉冲输入口,PLC通过读取高速脉冲输入口数据,计算出此时其他两个轴的控制电机所需要的控制数据并分别发送至2个伺服电机控制器,控制伺服电机运行,实现轴2、轴3与轴1的同步运行。
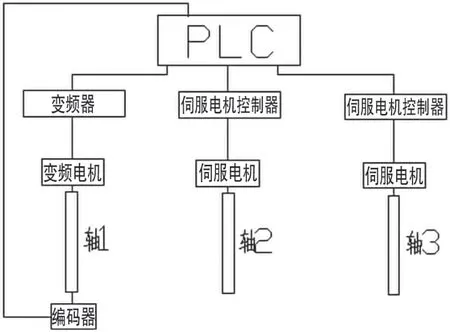
图1 编码器+PLC+伺服电机控制方式
1.1.2 系统配置需求
这种控制方式选择元件时需满足:
(1)选择高精度增量型编码器,以保证PLC对运动基准轴运动状态的精确采集,并注意脉冲输出形式最好采用差分信号方式,更能保证精度,同时抗干扰能力强。
(2)PLC需配有与编码器输出脉冲形式相应的高速脉冲输入端子,接收编码器的输入脉冲;此外依据PLC与伺服电机的连接方式不同,PLC还需具有高速脉冲输出端子或与伺服控制器相应的通信接口。且PLC还需具有中断和高速计数与计算功能。
(3)如果PLC与伺服电机控制器采用通信方式进行连接,则伺服电机控制器应具有与PLC相应的通信接口,支持相应的通信协议,伺服电机控制器选择位置控制模式运行。
1.2 方案2:PLC+伺服电机控制方式
1.2.1 系统工作原理
这种方式的原理如图2所示,PLC通过内部运算,计算出设定工作速度下伺服电机需要的输出数据分别发送至3个伺服电机控制器,控制伺服电机运转,实现3个轴的同步运行。

图2 PLC+伺服电机控制方式
1.2.2 系统配置需求
这种控制方式选择元件时需满足:
(1)依据PLC与伺服电机的连接方式不同,PLC需具有高速脉冲输出端子或与伺服控制器相应的通信接口。且PLC需具有高速计算功能。
(2)如果PLC与伺服电机控制器采用通信方式进行连接,则伺服电机控制器应具有与PLC相应的通信接口,支持相应的通信协议,伺服电机控制器选择位置控制模式运行。
2 PLC运算
(1)方案1计算
PLC接收外部运行速度设定信息后,首先控制变频电机(或其他可调速电机)启动逐渐加速至设定转速运转,同时启动高速计数和定时中断功能,根据控制精度需要及PLC运算速度,以10 ms或100 ms为定时中断条件,在中断周期内对高速脉冲输入口的输入信号进行高速计数,定时中断信号到来后,取出计数数值,并对计数地址内的数据进行清零,开始下一次中断周期的高速计数,通过数据对轴1的转速实时计算。
在得到轴1的实时转速后,依据各轴的机械尺寸、各电机所带减速器的减速比以及伺服电机控制器内部所设定的电子齿轮比等数据,即可计算出与轴1的速度相对应的轴2和轴3的转速,并将此转速数据或与转速相对应的脉冲数据及控制信号发送至轴2、轴3的伺服电机控制器,从而实现控制三轴同步运行。这种方式是轴2、轴3在追随轴1的运转,所以整个系统启停阶段的加减速是通过控制轴1电机的加减速曲线来完成的。
(2)方案2计算
PLC接收外部速度设定信息后,根据各轴的机械尺寸、电机所带减速器的减速比以及伺服电机控制器内部所设定的电子齿轮比,即可计算出相对此设定速度的各轴所需的转速,并将此转速数据或与转速相对应的脉冲数据及控制信号发送至各个伺服电机控制器,控制三轴同步运行,注意此种控制方式时,电机的启停阶段的加减速曲线应由PLC输出数据的变化控制完成,而非直接将目标速度参数发送给伺服电机控制器,由控制器内部参数设定来完成,这样可适当防止由于电机控制器及电机差异造成的启停阶段出现的不同步。
根据PLC的运算原理可知:由于方案1中PLC需要首先实时采集轴1的运行信号,然后根据轴1的运行速度不断调整轴2与轴3的控制信号,因此控制精度略低于方案2,对于精度要求不太高,多轴同步的轴数较少时可以采用方案1,该方案成本略低。
3 PLC与伺服控制器的连接方式
PLC与伺服电机控制器通常有两种方式进行连接:
(1)PLC可通过端子直接连接伺服电机控制器的接线端头,发送控制脉冲信号对伺服电机进行控制,这种方式需要PLC具有高速脉冲输出接点,对于伺服电机数目较少的控制系统,可采用这种方式。此方式成本略低。
(2)PLC也可通过通信,如RS485或CANopen等通信方式与伺服电机控制器的通信接口进行连接,发送控制数据对伺服电机进行控制,这种方式需要PLC与伺服电机控制器具有支持相同通信协议的通信接口,此时PLC不需要高速脉冲输出接点,伺服电机数量的可扩展性提高,但这种连接方式需要考虑通信线传输距离及通信的抗干扰问题。
4 结语
通过以上分析可知:
(1)构建基于PLC的多轴同步控制系统,如果控制轴数量较少、精度要求不是特别高且要节约成本的话,可以采用方案1+端子接线的方式实现,但采用方案1还需注意,轴1与轴2、轴3如果工作在前后顺序状态时,在设计选型中应满足各轴的扭矩相差不大,否则运行过程中有可能出现由于轴1的运动速度波动而引起轴2或轴3拖动轴1飞转或拖停的现象。
(2)构建基于PLC的多轴同步控制系统,如果控制轴数量较多、精度要求较高的话,建议采用方案2+通信方式进行。
当然,最佳的实现方案还要设计者依据具体的应用情况进行设定。