基于慧鱼模型方法的老旧小区立体车库创新设计
2021-06-24张永锐张忠林王飞皓张瀚文
张永锐,张忠林,王飞皓,丛 晖,张瀚文,郭 旋
(哈尔滨工程大学机电工程学院,哈尔滨 150001)
0 引言
近年来,随着我国经济水平和居民生活水平的不断提高,人们购车的能力及意愿显著提升,机动车以及汽车保有量稳步增长。到2019年我国机动车保有量达到3.48亿台,同比增长6.42%;汽车保有量达到2.60亿台,同比增长8.33%[1]。

图1 2015-2020年停车位需求量
如图1所示,随着城市汽车保有量的不断增加,城市小区尤其是老旧小区停车位紧缺、停车难问题日益严重,现有老旧小区也基本都不具备建立大型地下或地上多层立体车库的条件。机械式立体车库可充分利用土地资源,发挥空间优势,最大限度地停放车辆,成为解决城市静态交通问题的重要途径[1]。如今,机械式停车设备主要包括升降横移式、垂直升降式、简易升降式、巷道堆垛式、无避让式等类型[1-3],如图2所示。
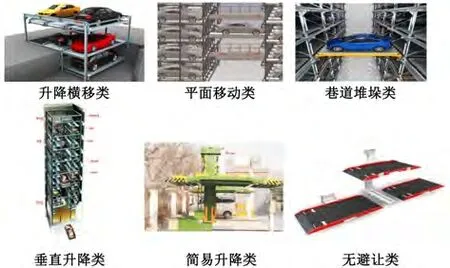
图2 立体式停车库类型
本文通过对立体车库需求的统计分析,对无避让式停车装置进行了改良,提出了一种适用于老旧小区的高空旋转式立体停车库方案。与无避让式停车装置不同,将存取车装置和停车区域分开,通过各部分的单独运动组合完成车辆的存取,能够停放更多车辆。该方案具有占地小、智能化、便停车、效率高等创新设计特点,装置可以安装在小区内或小区中的各种岔路口,基本适合于各种大小型小区,具有良好的现实意义和推广应用价值[4]。
1 工作原理
1.1 整体方案设计
本装置主要由基本框架、垂直升降装置、立柱旋转装置、运车装置(载车板前后进给机构)、存车区域和控制系统等组成,如图3所示。

图3 模型整体装配图
1.2 工作过程
整套装置的大体工作过程如下。
(1)存放车辆时,车辆通过引导车道停在载车板上方,通过垂直升降装置把车上升到中央立柱停车区域上方一定距离;此时立柱旋转装置启动,使2个立柱同时旋转,保证载车板的位置与空车位的位置相平行,以实现后续的对接;运车装置将载车板运送到指定存车区域上方,使载车板与车位上的梳齿式结构相互交错,随着载车板的下降,车辆稳稳停在立柱上;最后在升降装置和旋转装置配合下,载车板归位,存车完成。
(2)取出车辆时,取车过程存车过程相反。垂直升降装置和立柱旋转装置先启动将载车板运送至车位下方平行位置,通过运车装置使载车板前进的指定位置,随着载车板的上升,存车区域的车辆被抬起,最后通过3种装置配合车辆被送回车主身边。
2 机械结构设计
2.1 载车板
载车板、载车架的设计如图4~5所示,由于慧鱼标准件无法搭载出所示的梳齿形状,二者采用3D打印PLA材料制作。梳齿对接的间隙在对接过程中起到了对载车板的限位作用,保证存取车的顺利进行而不发生运动干涉[5-9]。

图4 载车板

图5 载车架
2.2 垂直升降装置
载车板的垂直升降装置如图6所示,主要由丝杠螺母机构完成。利用丝杠的旋转可以实现螺母在固定的轨道内升降这一特性,使固定在螺母上的载车板达到给定高度,同时,由于丝杠螺母本身具有自锁性,载车板可以精准定位高度。

图6 垂直升降装置
2.3 立柱旋转装置
立柱旋转装置如图7所示,主要由同具有自锁性的蜗轮蜗杆机构完成。固定在立柱上的齿轮在蜗杆的带动下带动立柱在固定范围内旋转,与此同时载有停车区域的中央立柱在蜗轮蜗杆机构传动下发生旋转,使得载车板位置与空车位位置相互平行,在升降装置的作用下完成初步对接。
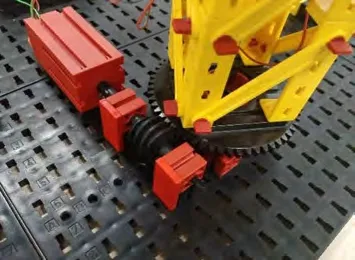
图7 立柱旋转装置

图8 运车机构

图9 整体程序
2.4 运车装置
载车板的前后进给机构如图8所示,主要由曲柄滑块机构完成。利用滑块只能在固定轨道内运动,定位性好的特性,不仅可实现载车板相对于停车区域的前后运动,还可以很大程度上减小惯性的影响。
3 控制系统设计
旋转式立体停车库的整体程序如图9所示,实验装置的存取车辆为8辆。
3.1 条形码程序
条形码程序如图10所示。对于车库系统的控制,实行“一码一车”的原则,通过条形码来识别和记录车位信息,实现凭码取车,方便快捷,安全性高,避免了取错车、乱取车等现象的发生。条形码示例分别如图11所示。
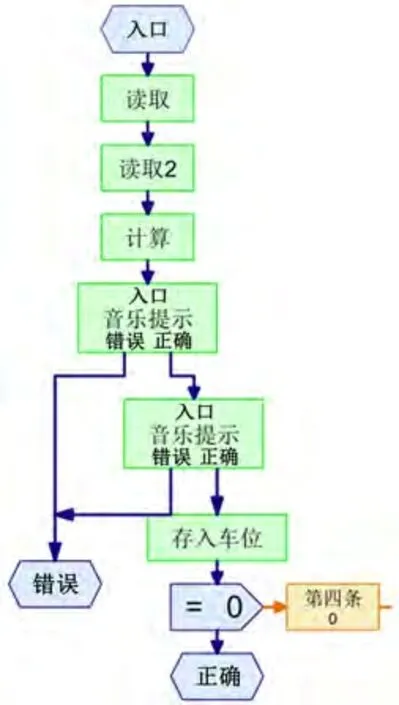
图10 条形码程序

图11 条形码示例
3.2 存车程序
装置的存车程序如图12所示,利用分居中央停车区域两侧的停车装置可以实现2辆车辆同时存车。当车主凭借条形码存车时,系统会自动检验最近的空车位,空车位的检测由每个车位上的触发式开关完成,通过载车板触碰开关的次数,来判断车位是否有车辆,检测车位的程序如图13所示[10]。检测完毕,该空车位的车位信息录入到车主的条形码中,按照载车板垂直上升、多个立柱配合旋转、载车板对接存车的工作顺序把车停在该停车位上,待车辆停好后完成复位工作。
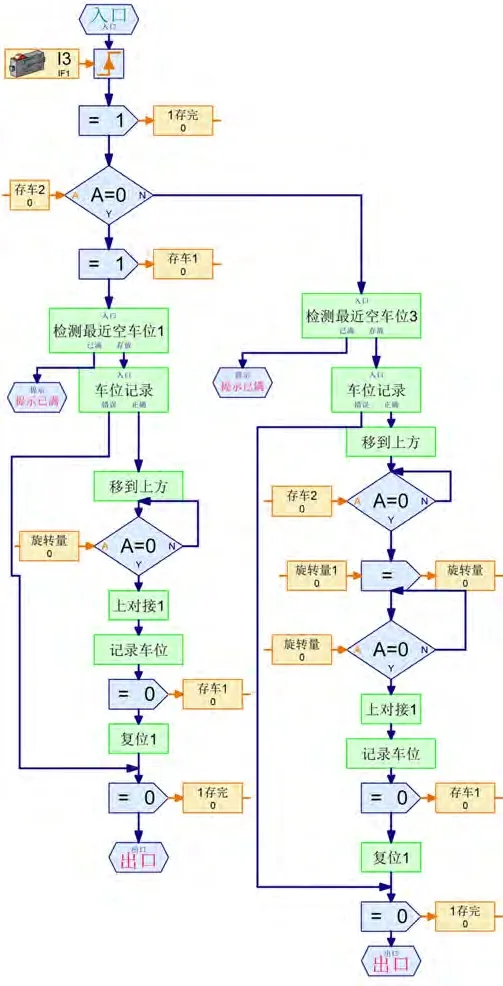
图12 存车程序
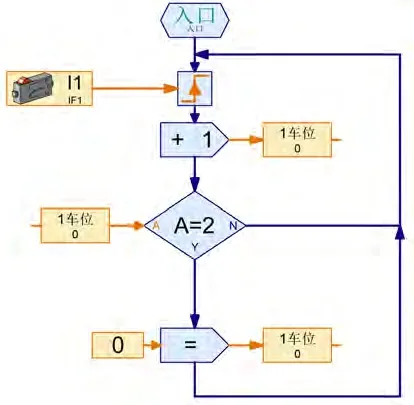
图13 检测车位是否有车辆程序
3.3 取车程序
装置的取车程序如图14所示,与存车过程相同,停车装置可以实现同时取出多个车辆。当车主凭借该条形码取车时,通过慧鱼的颜色传感器模拟扫码识别出条形码上的车位信息,计算出其与当前车位的位置关系与距离并判断离当前车位最近的存取车装置如图15所示,通过程序控制电机脉冲计步旋转进行取车操作。若条形码中无车位信息进行取车,系统将会发出警报。
3.4 错误提示程序
为了保证存取车过程的准确进行,防止出现车主忘记插卡、存车卡重复以及取车错误的现象,装置相关的错误提示程序如图16~18所示。
4 车库评价
4.1 评估指标
本装置具有节约占地面积停放更多车辆、快捷智能存取车辆、节省能源等特点,其主要功能指标如下:
(1)占地面积S≤4个车位;
(2)存放车辆N≥8个车位(在材料性能允许情况下可进行扩展);
(3)单辆车存取时间t1≤2.5 min;
(4)多辆车存取时间:第一辆车存取时间不变,第二辆车t2≤1.5 min(存取过程2辆车不是单独进行,有大半部分独立运行,可相继进行)。
4.2 实验验证
4.2.1 复位
复位过程如图19所示。
4.2.2 存车
(1)存车开始,如图20所示。
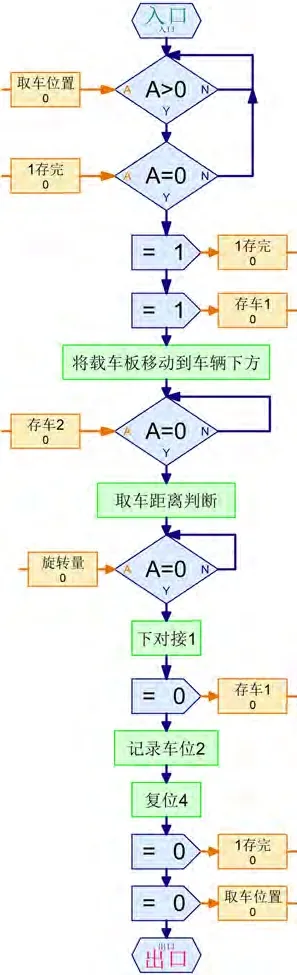
图14 取车程序

图15 取车距离判断程序
(2)搬运装置与存车区域对接过程,如图21~22所示。
(3)存车完成,如图23所示。

图16 存车重复提示
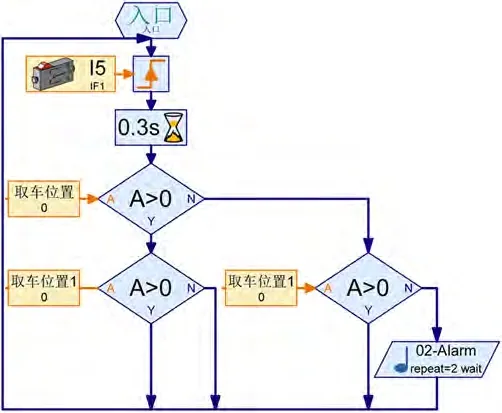
图17 取车错误提示
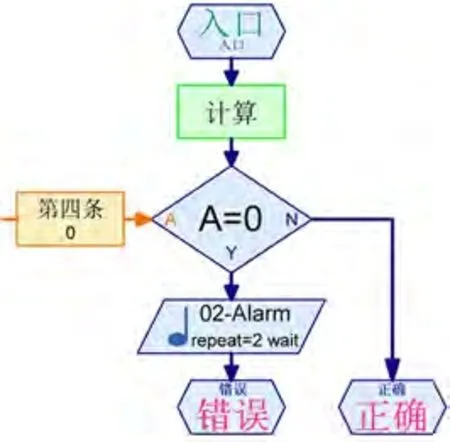
图18 忘记插卡提示
4.2.3 取车
(1)取车开始,如图24所示。
(2)搬运装置与存车区域对接过程,如图25所示。
(3)取车完成,如图26所示。

图19 装置复位状态

图20 搬运装置上升

图21 立柱旋转准备对接
经过实验验证,本装置能够实现多辆车同时存取,存取过程能够准确有序进行,达到了实验目的。

图22 载车板、载车架对接存车

图23 存车对接完成

图24 搬运装置上升

图25 载车板、载车架对接取车

图26 取车完成交付车主
5 结束语
本文给出了一种老旧小区车库的设计方法,利用“慧鱼”构件种类繁多、可反复拆卸、无限扩充、组合灵活、利于创新的特点,提出了一种高空可旋转式立体停车库方案,经过慧鱼搭建和干涉,验证了车库设计是合理的。本文进行了运动分析,完成了车库控制系统的设计和调试,可实现整体车库的功能。具有占地小、智能化、便停车、效率高等创新设计特点。
本文所设计的机械式创新立体停车库作为一种解决停车问题的方案,能够满足大众的需求,可为老旧小区的立体车库设计提供参考。
