斜齿轮系统动力学行为研究
2021-06-24吕小红
张 伦,吕小红,高 博
(1.兰州交通大学机电工程学院,兰州 730070;2.甘肃省轨道交通装备系统动力学与可靠性重点实验室,兰州 730070;3.兰州长信机车配件有限公司,兰州 730070)
0 引言
齿轮系统现如今被广泛运用于机械、航空、船舶等行业。因为其是机器中最主要的运动及动力传递装置,其动态性能的好坏会直接影响整个机器的运行状态[1]。有些学者已经对冲击碰撞系统的周期运动行为进行了大量研究,这类研究方法同样适用于斜齿轮振动系统中[2-3]。苏程等[4]研究了不同侧隙值下,啮合阻尼比对单级齿轮传动的影响;刘大亮等[5]在考虑齿侧间隙对齿轮动态特性影响的同时,还考虑了轴承间隙对整个系统的影响;田亚平等[6]采用数学理论推导与数值分析相结合的方法,对齿轮与转子耦合系统进行了仿真研究。还有一些文献对故障齿轮系统进行了动力学行为研究[7-9]。
本文主要建立斜齿轮模型,兼顾考虑齿侧间隙和轴承间隙,绘制分岔图与相轨迹图来揭示其动力学行为,为此系统设计安全性和平稳性提供理论依据,并且结合工程应用实际,模拟斜齿轮系统轻微磨损状态,进行了磨损状态的动力学行为探究。
1 模型建立
图1所示为一种斜齿轮传动动力学模型。假设:(1)齿轮和轴均为刚性元件,不考虑轴和轴承的质量;(2)齿轮为对称安装,不存在偏心,并且将安装的误差计入齿轮的综合传动误差;(3)整个支撑系统和啮合副简化为阻尼元件和刚度元件,齿轮1为左旋齿轮,齿轮2为右旋齿轮,压力角α=20°,螺旋角β=18°,模数m=0.003,齿数比为35∶67。
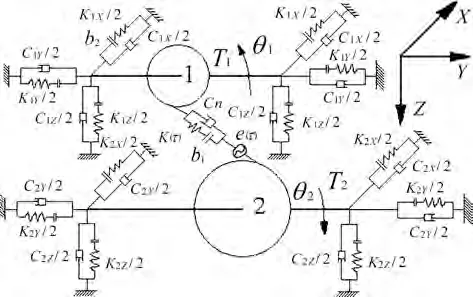
图1 斜齿轮动力学模型
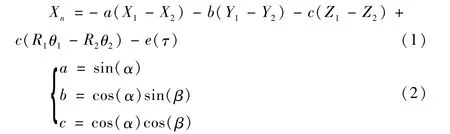
振动和误差导致斜齿轮副沿啮合点法线方向的相对微位移为:
斜齿轮副沿法线方向的啮合力及各个坐标轴方向的分力分别为:
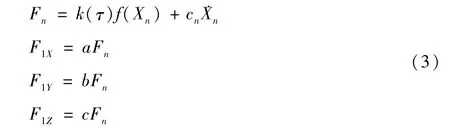
式中:R1、R2分别为齿轮1和齿轮2的基圆半径;θ1、θ2分别为齿轮1和2的旋转角位移;e(τ)为斜齿轮副的时变综合误差函数;k(τ)为时变啮合刚度;cn为啮合阻尼;F1X、F1Y、F1Z分别为齿轮1所受的径向力、轴向力和切向力。
齿轮副时变啮合刚度可表示为:

式中:km为齿轮副的平均啮合刚度;ea为无量纲刚度幅值;ω为无量纲啮合频率;ε为初相位。
时变综合误差函数可表示为:

采用集中质量法建立运动微分方程如下:
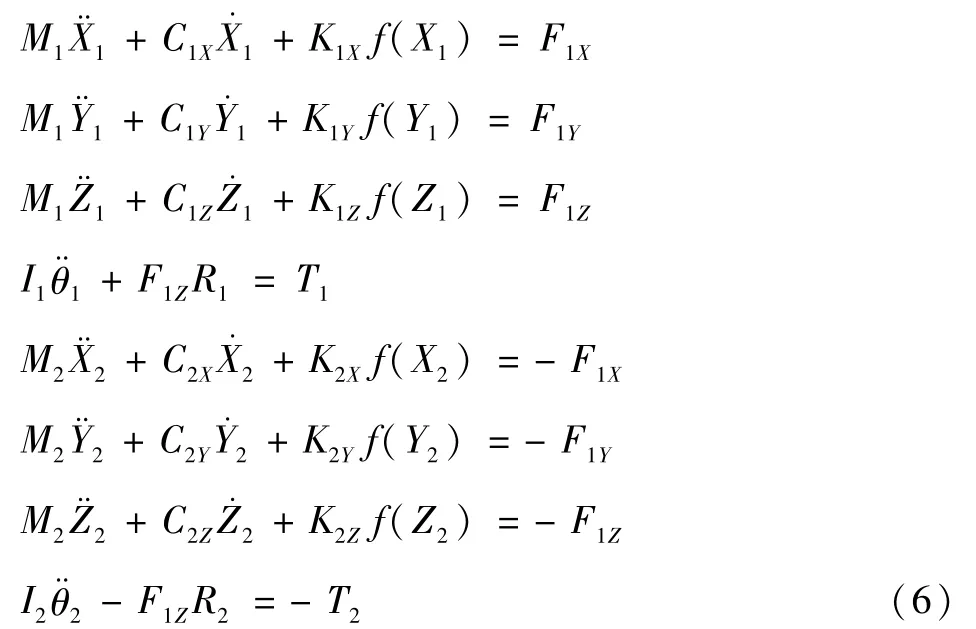
式中:Mi为齿轮i的质量;Ri为齿轮i的基圆半径;Xi、Yi、Zi为齿轮i沿X、Y、Z坐标轴方向的微位移(其中X¨i,X·
i为齿轮i沿X轴方向微位移的二阶和一阶导数;Y、Z方向同理,不赘述);θi为旋转角位移;Cij,Kij为支撑阻尼和支撑刚度;T1,T2分别为输入和输出转矩;i=1,2;j=X,Y,Z。
引入无量纲参数:
xi=Xi/bc,yi=Yi/bc,zi=Zi/bc,t=ωnτ,特征频率ωn=为齿轮啮合副的当量质量;其中mi=为齿轮i当量质量。则有无量纲运动微分方程:
f(xn)和g(x1)分别为齿侧间隙函数和齿轮1在x方向上的支撑间隙函数。均可表示为:

2 动力学行为研究
斜齿轮系统是受周期激励的系统,其激励周期为T=2π/ω,θ=ωt,因此取Poincaré截面为:

2.1 啮合阻尼比对系统分岔特性的影响
根据无量纲运动微分方程,取系统的基准参数如下:特征尺寸bc=30×10-6,特征频率ωn=23 414,无量纲齿侧间隙b=1,无量纲输入载荷p1=0.048,选取无量纲啮合频率区域ω∈[0.2,3.0],对系统进行数值分析,得到如图2所示不同啮合阻尼比下的系统运动分岔图。通过图2(a)可知,在啮合阻尼比ξ=0.01条件下,当啮合频率ω>2.45时,系统处于稳定的周期1运动状态。随着ω的递减,当ω穿越2.45时,系统经倍化分岔进入短暂周期2运动状态。ω继续递减,在ω∈[1.45,2.29]范围内,系统呈现出大幅的混沌区域,此时系统运动极不稳定,并且在ω∈[1.94,2.15]范围内,夹杂着短暂的周期3运动状态。而在ω∈[1.24,1.45]的区间内,如图2(b)所示,系统的运动状态经历了周期8—混沌—周期4—周期2的变化过程,大体呈现出逆倍化分岔的形式。而后系统又经历了混沌—周期2—周期1—混沌—周期1等运动状态,并且在跨越ω=0.536时,经跳跃分岔转迁为稳定的周期1运动,此时系统恢复稳定。
当ξ增加至0.03时,系统分岔图如图2(c)所示。与ξ=0.01时相比较而言,混沌区域略微减少,周期运动区域有所增加。具体运动形式表现如下:当ω>2.266时,随着啮合频率ω的递减,系统经由周期1—周期2—周期4倍周期序列分岔进入混沌。随着控制参数继续递减,系统经历了一片混沌区域,在跨越ω=1.981时,系统的拓扑结构发生改变,由混沌运动退化为稳定的周期24运动。接着经由一系列的逆倍化分岔过程:周期24—周期12—周期6—周期3,在ω=1.70时结束周期3运动,并且在啮合频率ω∈[1.53,1.70]时系统再次失去稳定性,表现为混沌运动状态,而在此区域内还包含着极短暂的周期2运动。当ω<1.53后,系统的运动状态经历了周期8—周期4—周期2—周期1—(跳跃分岔)—周期1的变化过程。
继续增加啮合阻尼比ξ的值,取ξ=0.05,系统分岔图如图2(d)所示。此时系统的运动形式变化比较简单,不存在离散的混沌区域,运动形式与ξ=0.03时大致相似。随着啮合频率ω递减,系统同样经历了周期1—周期2—周期4的倍化分岔过程,在ω=2.2时,系统失去稳定性进入混沌运动。与ξ=0.03所异的是,此时的混沌运动是一片连续的区域,不存在混沌—逆倍化分岔—混沌的变化过程。ω继续递减至1.65时,系统结束混沌运动,回归到稳定的周期8运动状态,并且经历一系列逆倍化分岔,最终变为稳定的周期1运动状态。图3所示为ω∈[0.2,1.65]区间时系统经历逆倍化分岔过程的相图与Poincaré映射图的叠加,可以清晰地观察到这一系列分岔过程。

图2 不同啮合阻尼比条件下系统分岔
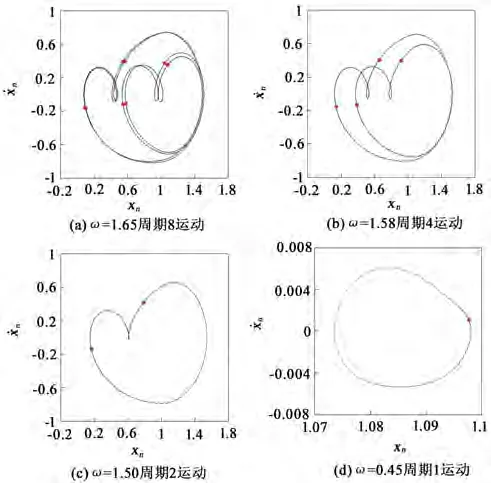
图3 逆倍化分岔过程
图3中,xn为无量纲相对位移;为无量纲相对速度;ω为无量纲啮合频率。
2.2 输入载荷对系统分岔特性的影响
保持系统基准参数不变,综合考虑取系统啮合阻尼比ξ=0.03。通过改变无量纲输入载荷的值,进行数值分析,得到如图4所示的系统分岔图。
通过图4(a)可以观察到,在无量纲输入载荷p1=0.027条件下,系统在啮合频率ω>2.28时呈现出稳定的周期1运动状态。当啮合频率ω递减穿越2.28时,系统的周期1运动经倍化分岔进入周期2运动状态,随后在啮合频率递减穿越ω=2.145时,系统再次经倍化分岔进入短暂的周期4运动状态。随着ω继续递减,系统的周期运动变得更加多样。在ω∈[1.24,2.125]和ω∈[0.96,1.065]的区域,系统出现了被周期运动间隔开来的大面积混沌运动,其中,ω∈[1.24,2.125]区间内出现了极小范围的周期窗口。从啮合频率ω=1.24开始递减,系统依次呈现的周期运动分别是周期8—周期4—周期2—周期4—周期2—周期1运动。其中周期1运动并不是一直表现出稳定状态,在ω递减穿越ω=0.57后,系统发生跳跃分岔,之后系统才趋于稳定。
另一方面,在无量纲输入载荷p1=0.048的基础上,将p1增大至0.063,其分岔图如图4(b)所示。在啮合频率ω递减至2.3时,系统依次发生周期一—周期二—周期四的倍周期分岔序列。ω继续递减,在ω∈[1.75,2.3]区间,系统呈现出大幅的混沌啮合运动。如ω=2.0时,系统的Poincaré映射图为一系列杂乱的密集点,相轨迹形成不封闭的曲线,如图5所示,证明此时确实是混沌运动。在啮合频率穿越ω=1.75时,系统从混沌运动退化为周期8运动。并且经历一系列逆倍化分岔,即周期8—周期4—周期2—周期1和两次跳跃分岔,分别发生在ω=1.25和ω=0.71之后,系统最终转迁为稳定周期1运动状态。
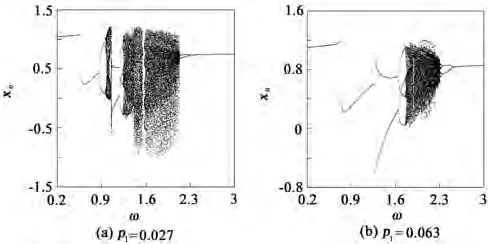
图4 不同输入载荷条件下系统分岔
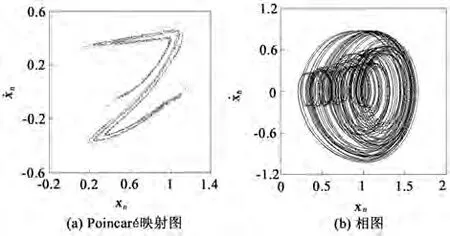
图5 ω=2.0 Poincaré映射图和相图
3 磨损条件下动力学行为研究
斜齿轮相比直齿轮而言,其啮合过程是一个过渡的过程,齿面的力是由小到大,再由大到小逐渐增加的。并且其重合度较大,所以适用于高速重载的场合。正是由于重载的因素,长期运转的斜齿轮系统便会发生磨损。如果忽视磨损等问题,就会造成意想不到的事故,故而对于磨损状态下运转的斜齿轮,有必要研究其动力学行为。
齿轮磨损会直接导致齿轮啮合间隙增大,主要可以分为单齿磨损和多齿磨损(或全齿磨损)两种状态。这里结合实际情况,以全齿均匀磨损来进行研究。
当全齿磨损故障发生时,可以用新的齿侧间隙函数f1(t)来作近似模拟[10]。
f1(t)可表示为:
式中:b为原始无量纲齿侧间隙为1.0;a为磨损故障的齿侧间隙,即全齿磨损的剧烈程度。
磨损状态系统分岔图如图6所示。为了方便与正常运转状态作比较,保持系统基准参数不变,取啮合阻尼比ξ=0.03。首先取a=0.1来模拟轻微磨损故障,得到如图6(a)所示的全局分岔图。对比图6(a)与图2(c),斜齿轮系统在轻微磨损状态下的分岔图变化不大。在高频区域,依旧是经过倍化分岔进入混沌运动,但是倍化分岔的区间有所减小。而更加明显的区别在于,两段混沌运动之间嵌入的周期六运动几乎消失不见,周期三窗口也略微有所减小。另一点主要区别在于,当啮合频率ω∈[1.0,1.3]区域时,系统不再是稳定的周期运动,如图6(b)为ω∈[1.0,1.3]的局部分岔图。具体表现为ω>1.132时为混沌运动,ω<1.132时为稳定周期运动,可通过图7所示的相图和Poincaré映射图加以验证。
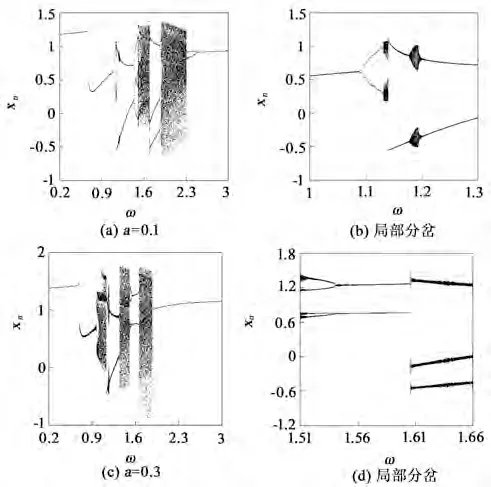
图6 磨损状态系统分岔

图7 轻微磨损故障相图及Poincaré映射图
取a=0.3来模拟齿轮系统剧烈磨损状态,得到系统分岔图如图6(c)所示。当ω>1.88时,系统处于稳定周期1运动状态,当ω穿越1.88时,周期1运动经Hopf分岔转迁为概周期或混沌运动,直到ω穿越0.7时,系统经跳跃分岔退化为稳定周期1运动状态,结束一系列混沌运动。图6(d)为ω∈[1.51,1.66]的系统局部分岔图,可以看到,此区间并非周期运动,而是混沌运动区间。
4 结束语
本文针对斜齿轮系统,建立包含齿侧间隙、轴承间隙和啮合阻尼比等在内的齿轮系统非线性动力学模型。通过对斜齿轮系统动力学行为的研究,得出如下结论。
(1)在斜齿轮系统中,啮合阻尼比的改变会使得系统的周期运动形式多样化。当啮合阻尼比较大时,系统的混沌啮合运动区间比较集中,分岔形式比较单一。随着啮合阻尼比的减小,系统会出现阵发性混沌区域,并且混沌区域的无量纲相对位移幅值更大。说明此时系统的冲击猛烈、稳定性弱。
(2)输入载荷的改变也会对系统产生较大的影响。具体表现为输入载荷很小时,系统处于中频运转时基本上全是混沌啮合运动,此时对齿轮系统以及整个机械设备都有极大的负面影响。而伴随着输入载荷的增加,混沌区域会有明显的缩小,并且在中频运转向低频过渡时混沌运动被周期运动取代,稳定周期运动所占比值增加。输入载荷越大,系统的周期运动形式越单调,越趋于稳定。
(3)在轻微磨损状态下,系统的运行状态变化不大,只是对低中频区间有着微小的负面影响。而在剧烈磨损的条件下,整个系统在中频区域皆处于混沌运动状态,说明此时齿轮系统已经出现严重的隐患,有必要考虑对齿轮进行处理,例如更换润滑油或者直接更换齿轮,以免发生事故。
